


MeArm Robotarm - Uw robot - V1.0
Componenten en benodigdheden
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 |
Over dit project
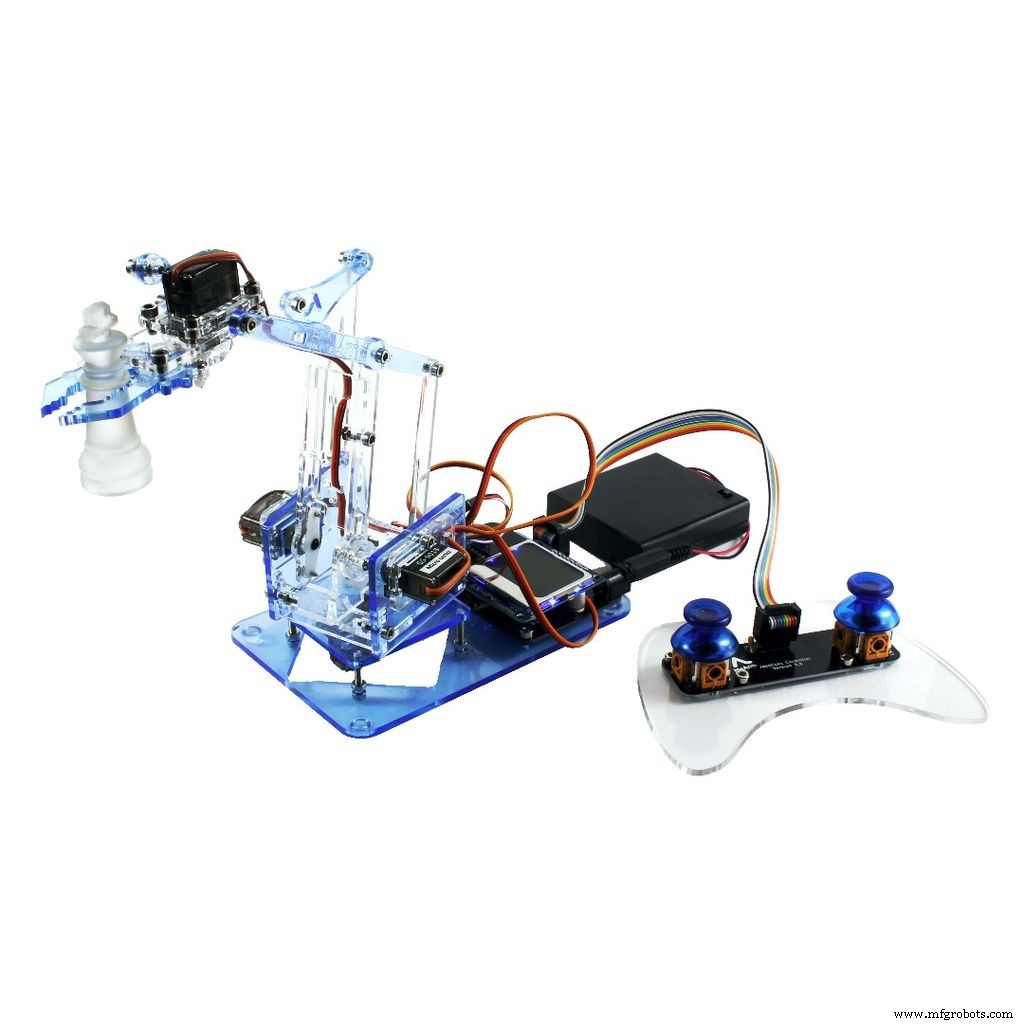
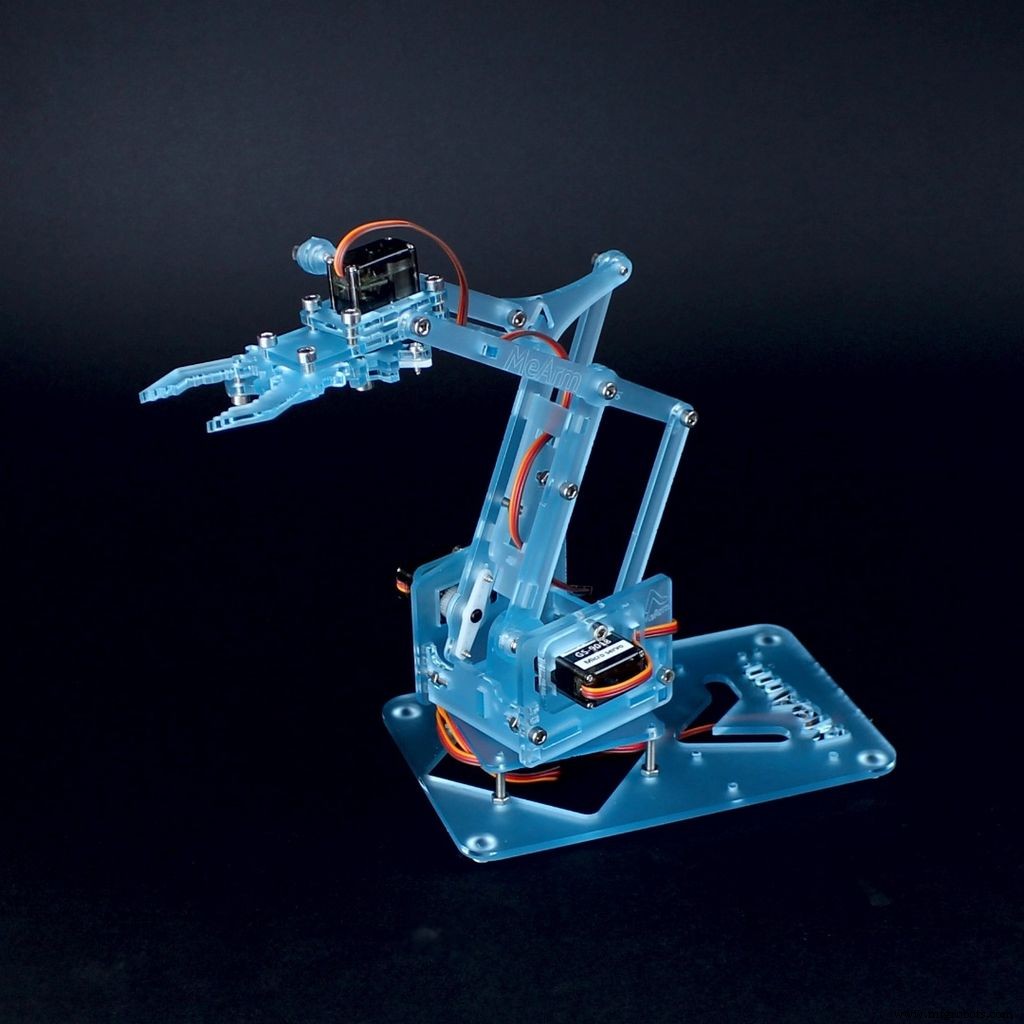
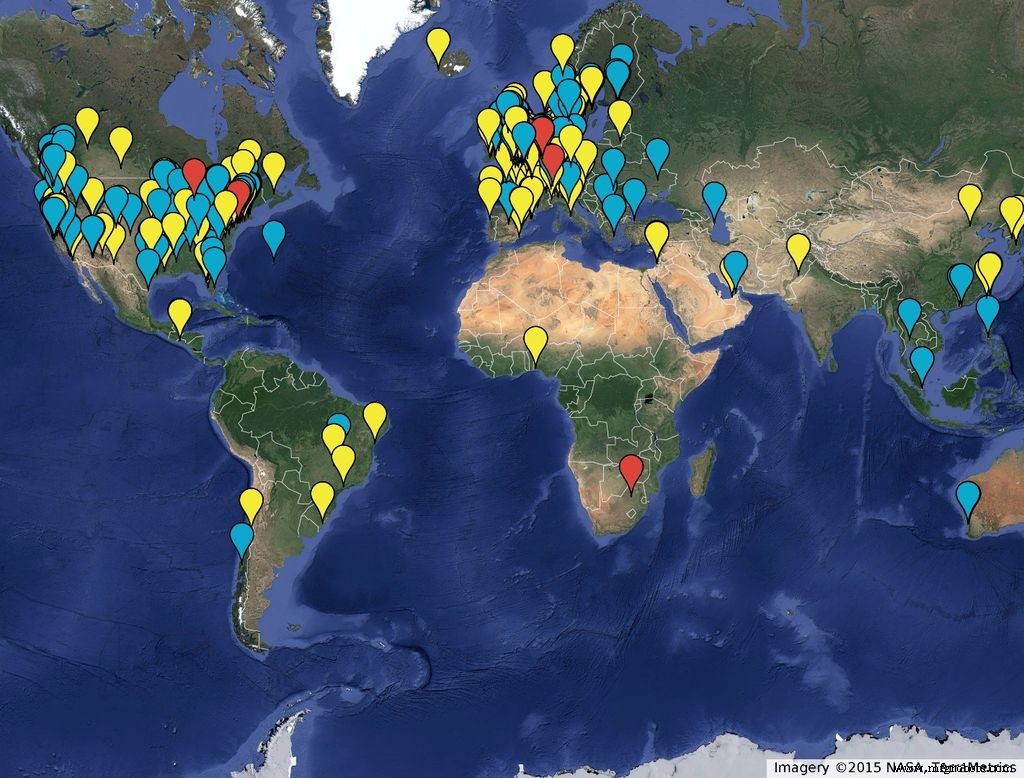
Dit is de allernieuwste versie van de bouwinstructies voor de MeArm Robotarm. De MeArm kwam voor het eerst naar instructables in april 2014 toen we een tweede prijs wonnen in de Robots Contest. Sindsdien hebben we er over de hele wereld zo'n 10.000 zien gebouwd! Slechts een handvol wordt getoond op onze kaart, maar we zijn er echt trots op dat we met behulp van instructables 's werelds eerste virale robot zijn geworden!
We hebben deze instructies samengesteld als aanvulling op die op onze bronnenpagina.
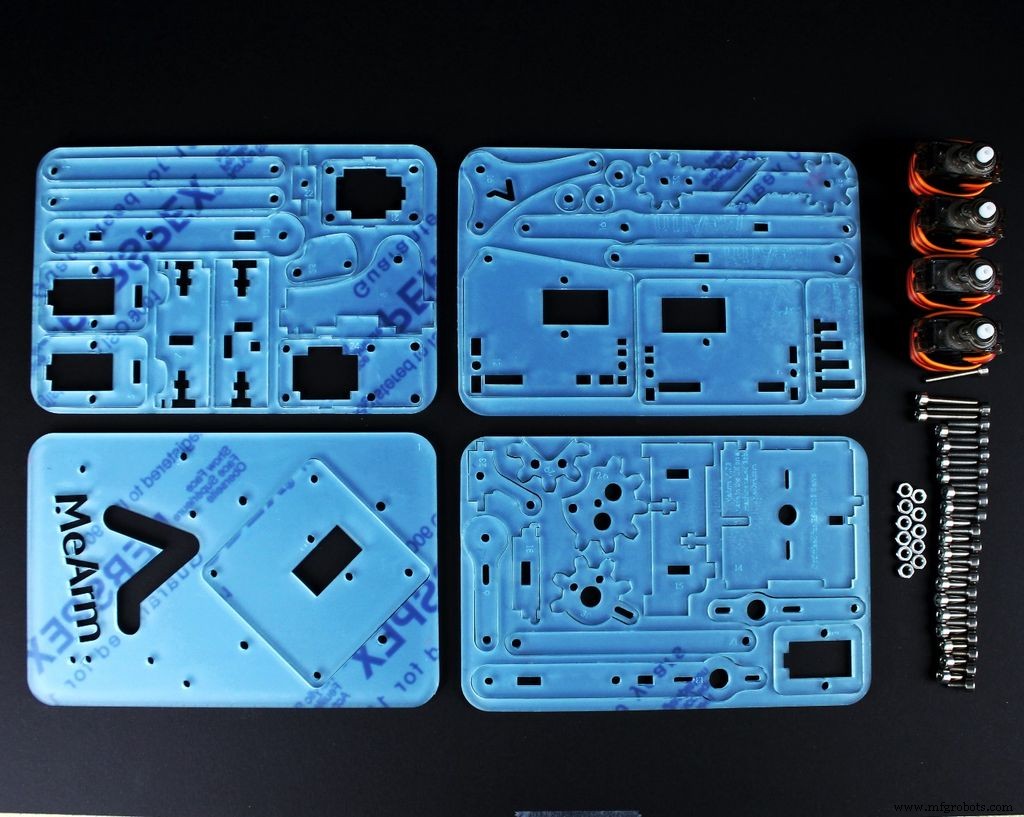
Stap 1:Pak je bestanden, start je lazors!
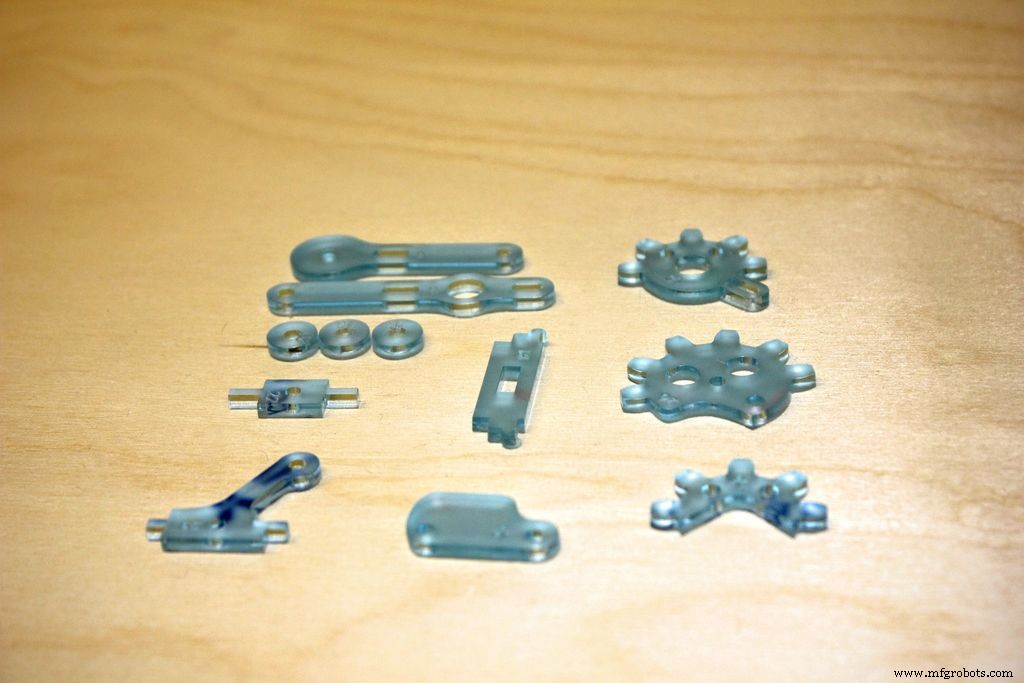
De MeArm is nog steeds en is vrijwel altijd open source hardware geweest. Dus je kunt onze bestanden ophalen bij thingiverse. Het is een .dxf-bestand, dus het zou op de meeste lasersnijders moeten werken en we hebben een doos rond de onderdelen geplaatst zodat je het op de juiste maat kunt instellen. We gebruiken 3 mm acryl, maar het ontwerp is redelijk tolerant en we hebben het in hout gezien en zelfs in 3D geprint.
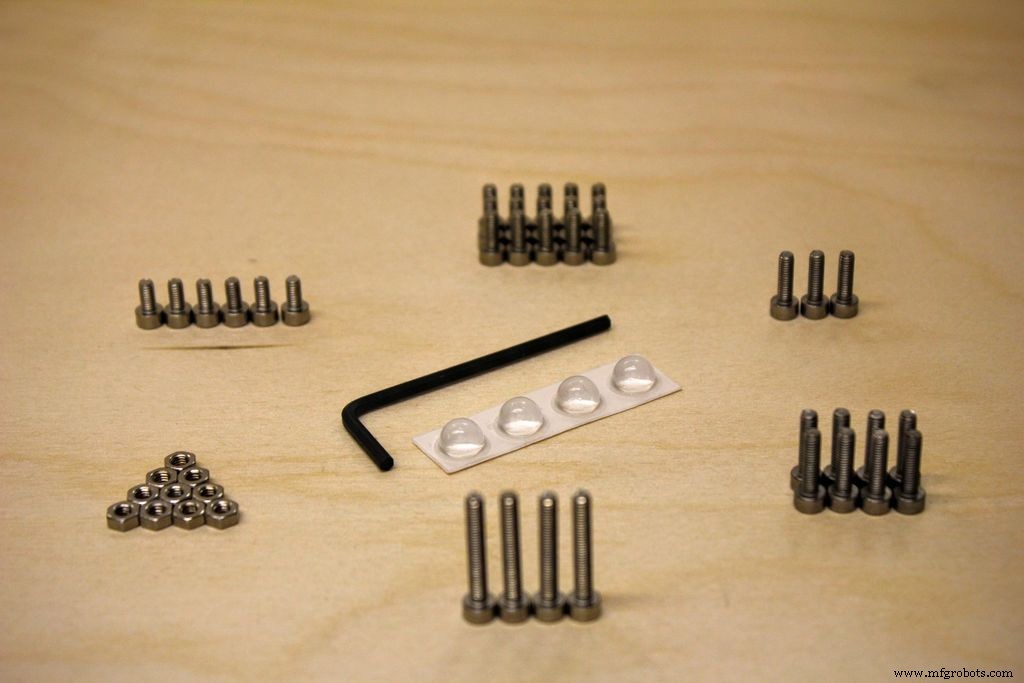
Je hebt ook een heleboel schroeven nodig. De huidige belasting vereist:
Moer x 11
6 mm x 7
8 mm x 15
10 mm x 5
12 mm x 8
20 mm x 4
Alle M3-formaten, dat is metrisch 3 mm. Ik begrijp dat het moeilijk te vinden is in de Verenigde Staten, maar kom op, je hebt de maan bereikt, je kunt een geschikt alternatief bedenken!
Stap 2:Houd vol! Laten we kalibreren!
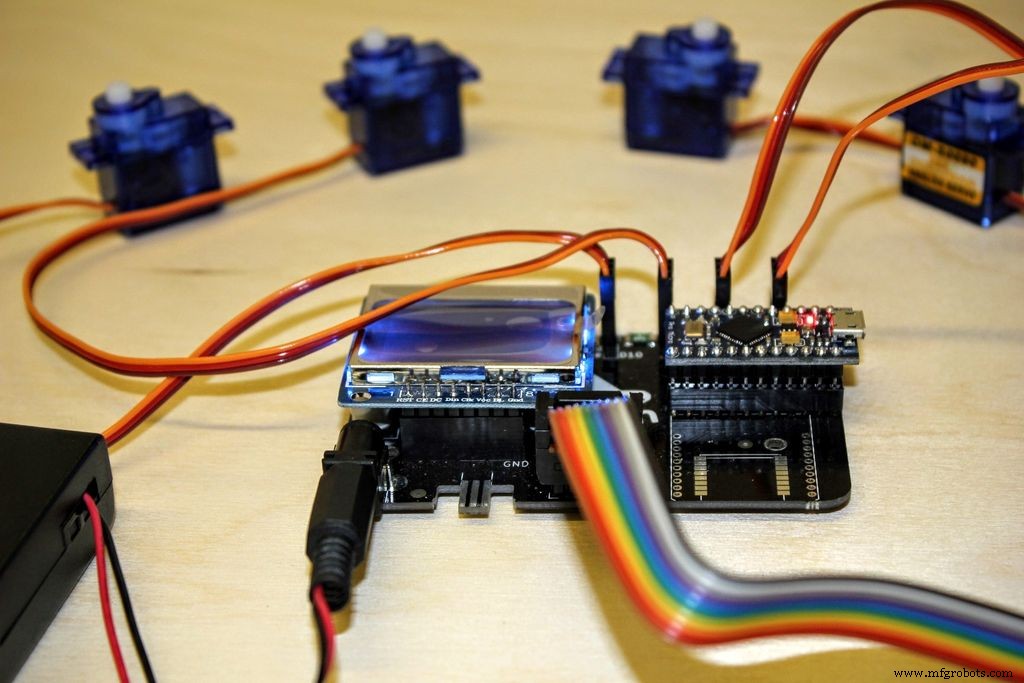

Als je je onderdelen hebt lasergesneden of een van onze kits hebt gekocht, wil je het echt laten bouwen. Maar eerst moet je een essentiële stap voltooien. We moeten de servo's kalibreren. Hier gebruiken we ons Brains Board, dat compatibel is met Arduino, maar je kunt alles gebruiken dat een PWM-signaal genereert om ze te kalibreren. Er is MeArm-code beschikbaar voor Arduino, Raspberry Pi, Beaglebone Black, Sparkcore en Espruino.
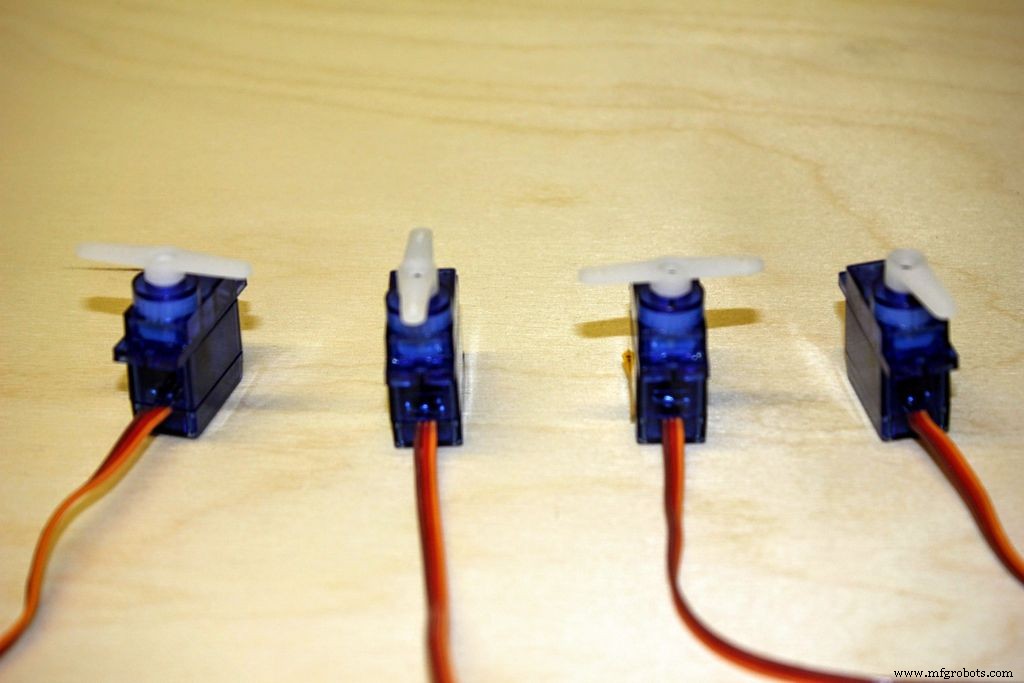
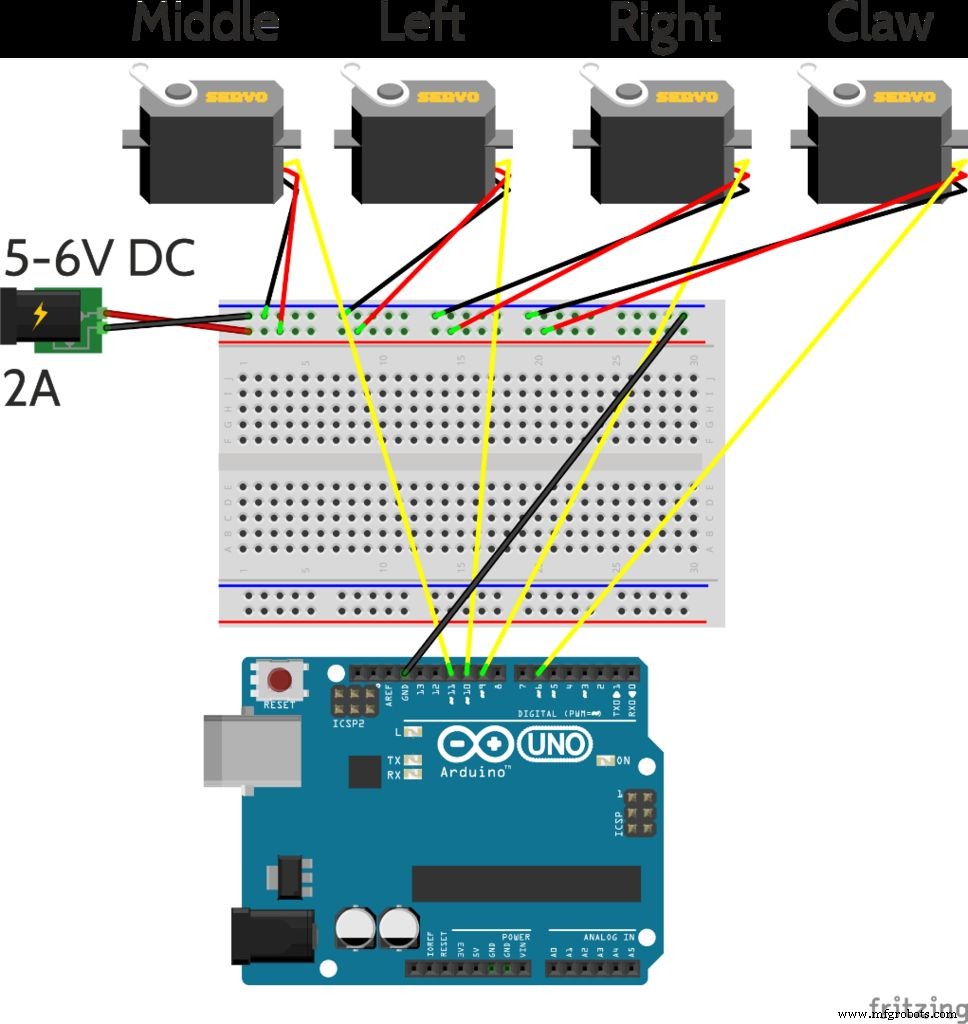
Met behulp van ons Brains Board wordt het geprogrammeerd om naar de standaardposities te gaan. Dat zijn 90, 90, 90 en 25 voor de servo's voor respectievelijk het midden, links, rechts en klauw. Markeer een middellijn op de spil en het lichaam van de servo en je kunt ze ook markeren als c, l, r en c of door een ander systeem dat iets voor je betekent.
Laat u niet verleiden om ze met de hand te draaien, het koppel dat door uw enorme kracht wordt geleverd, kan de servo-versnellingen strippen. Om dezelfde reden is het erg belangrijk dat je dit proces uitvoert voordat je je MeArm bouwt.
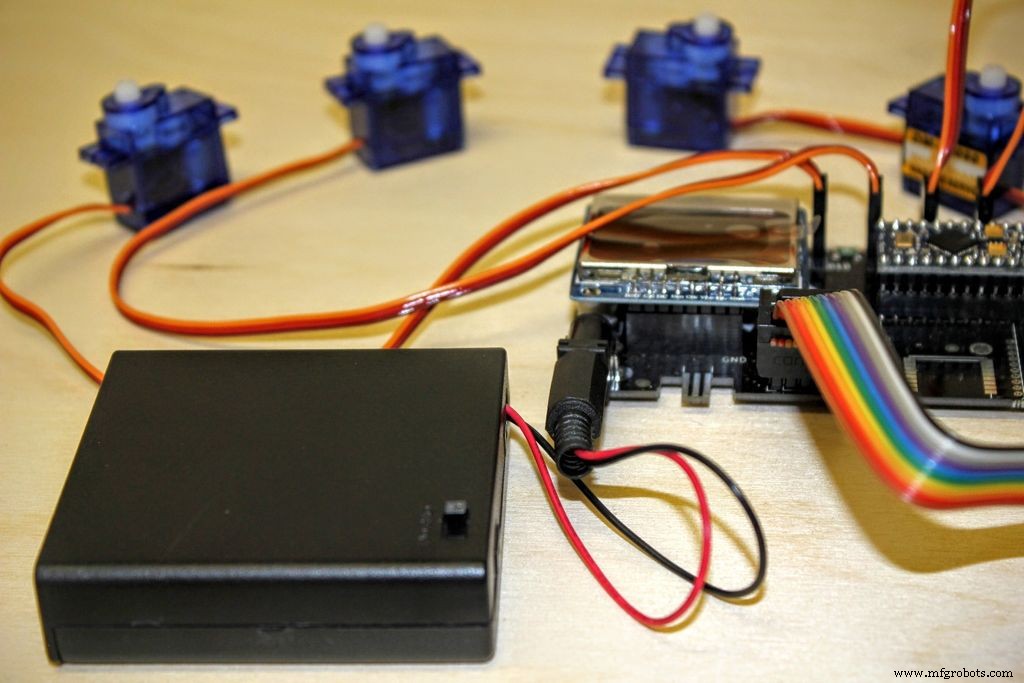
Als je Arduino gebruikt, dan geeft de setup in de afbeelding hierboven en deze code je hetzelfde resultaat. We gebruiken Codebender voor onze democode en zouden graag een tshirt willen. Dus gebruik deze link als je een account gaat openen.
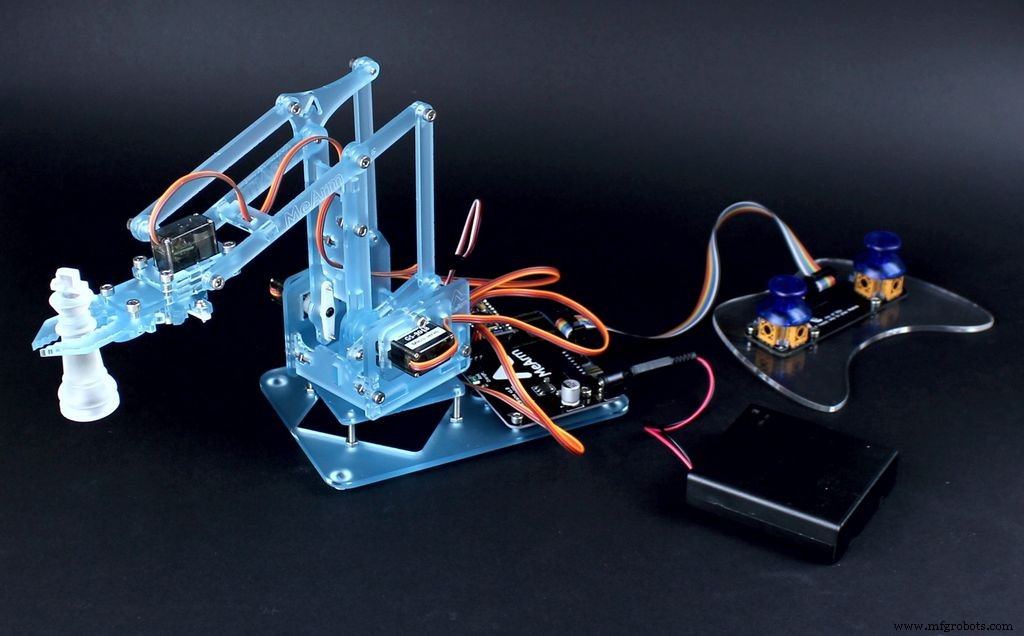
Het belangrijkste om te beseffen bij het instellen van je servo's is dat je ze niet via je microcontroller kunt voeden. Je hebt een aparte 5-6V 2A voeding nodig, met een gemeenschappelijke massa naar de microcontroller. Bekijk de Arduino-installatieafbeelding voor meer informatie.
Stap 3:Laten we gaan!
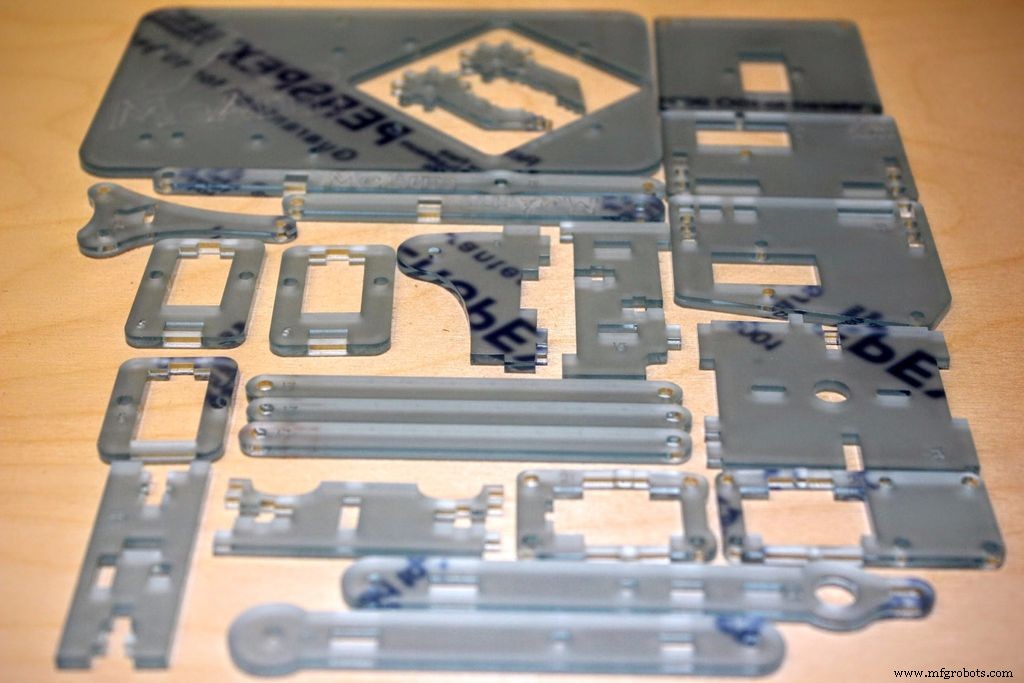
Met je servo's gekalibreerd kunnen we aan de slag. Letterlijk als je een van onze snap-out packs hebt!
U zult waarschijnlijk wat tijd moeten besteden aan het verwijderen van de beschermende achterkant van de acrylstukken. Je kunt dat doen als je gaat of allemaal tegelijk. Uw oproep.
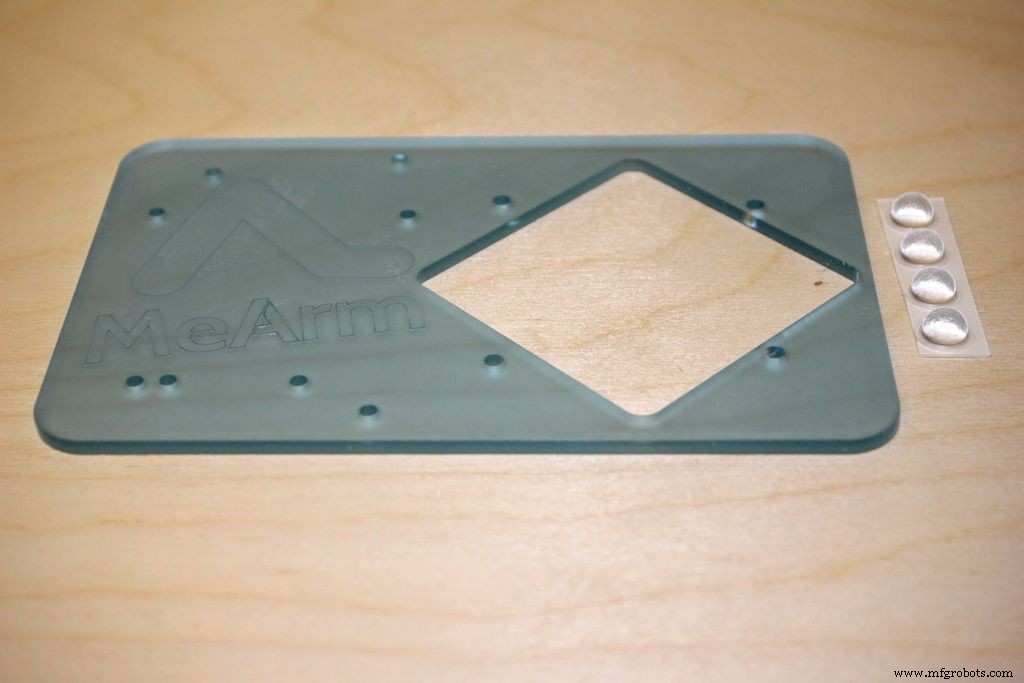
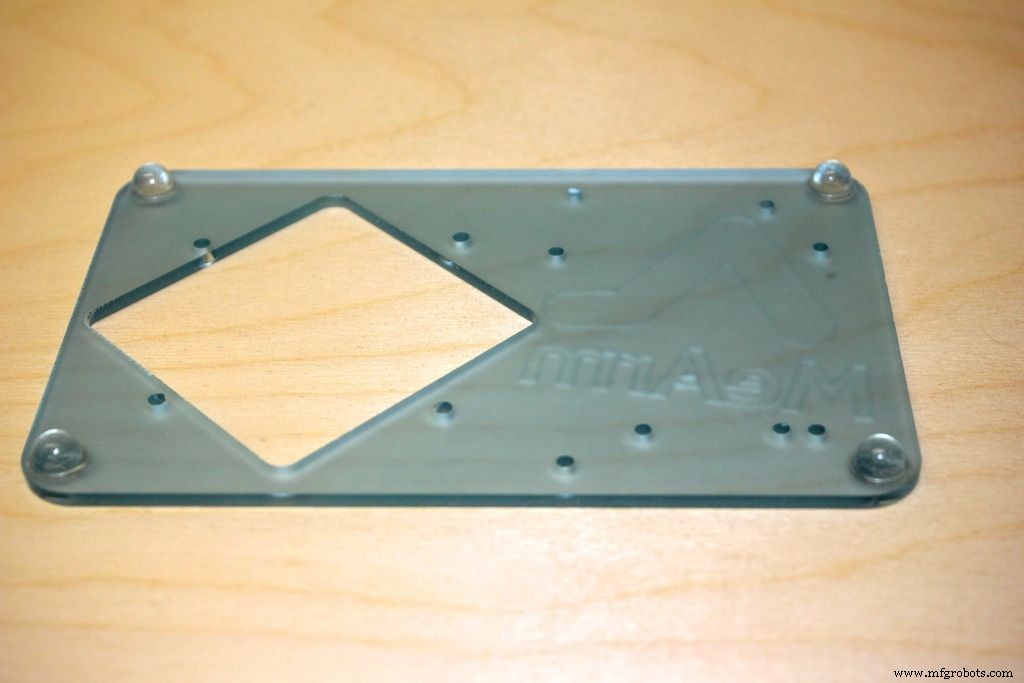
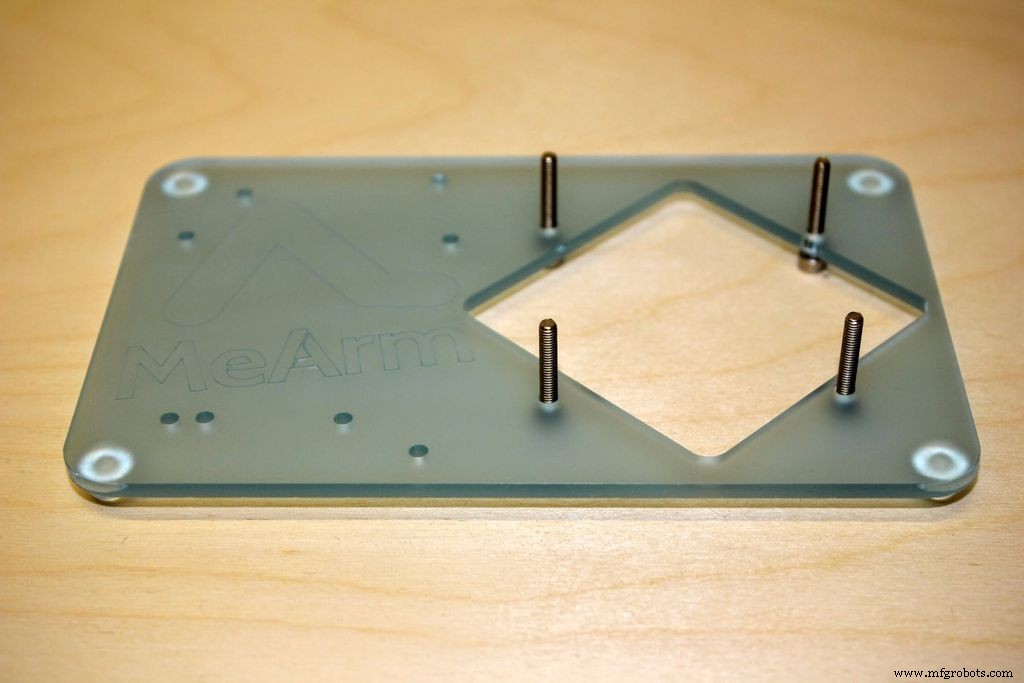
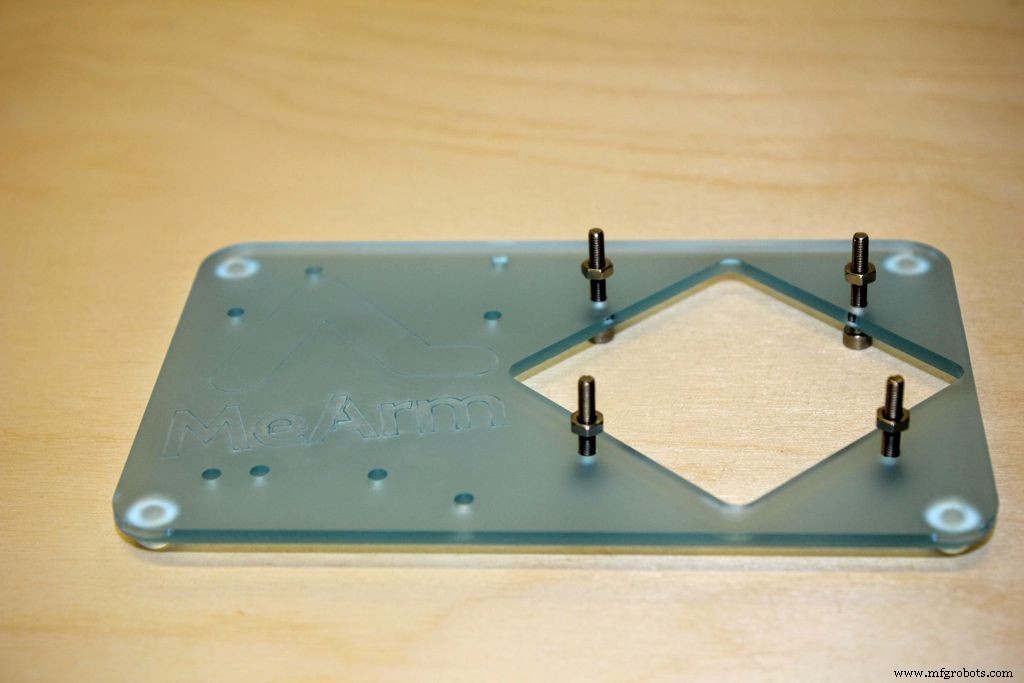
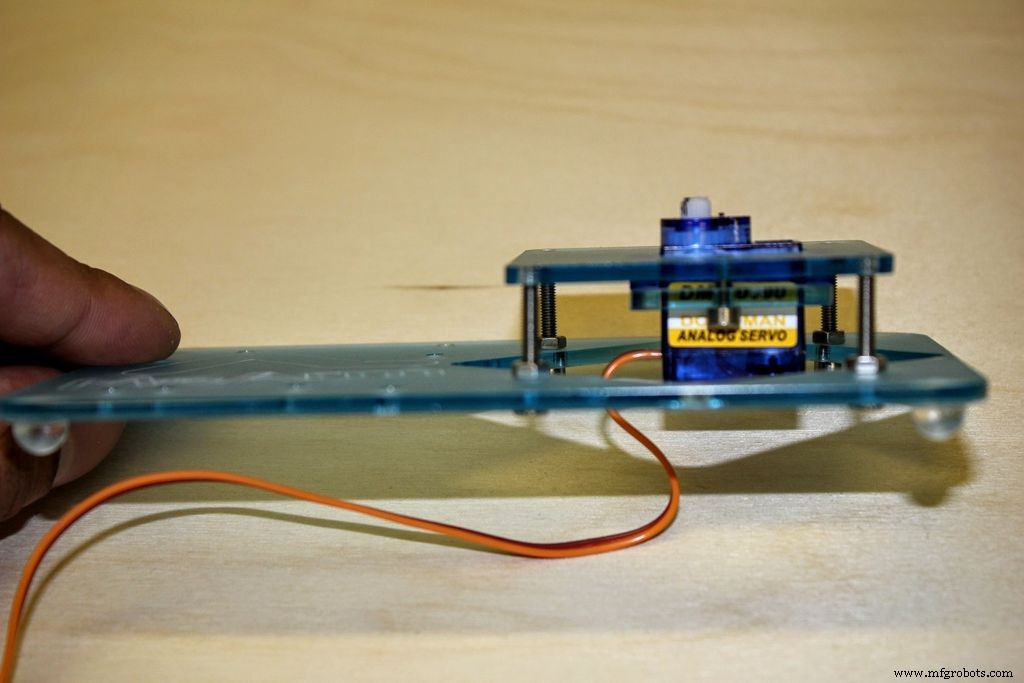
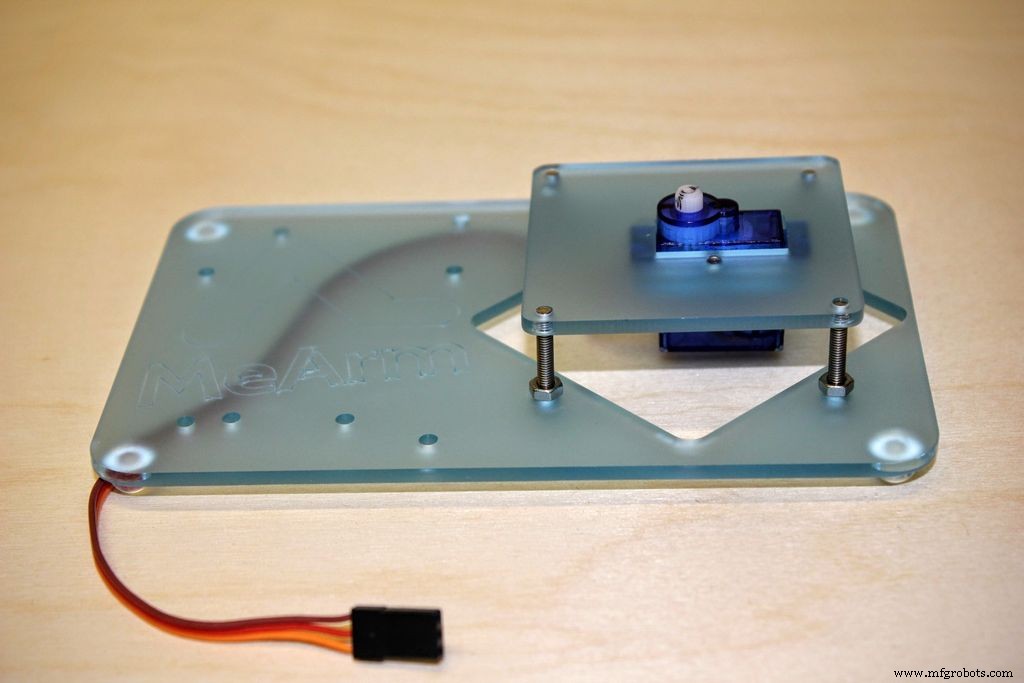
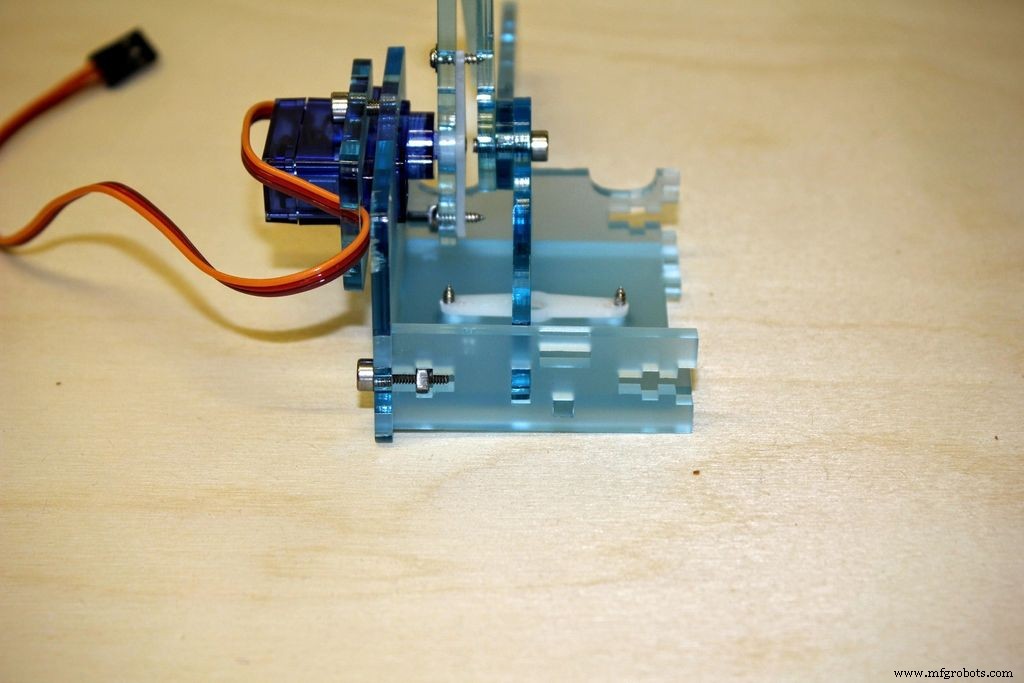
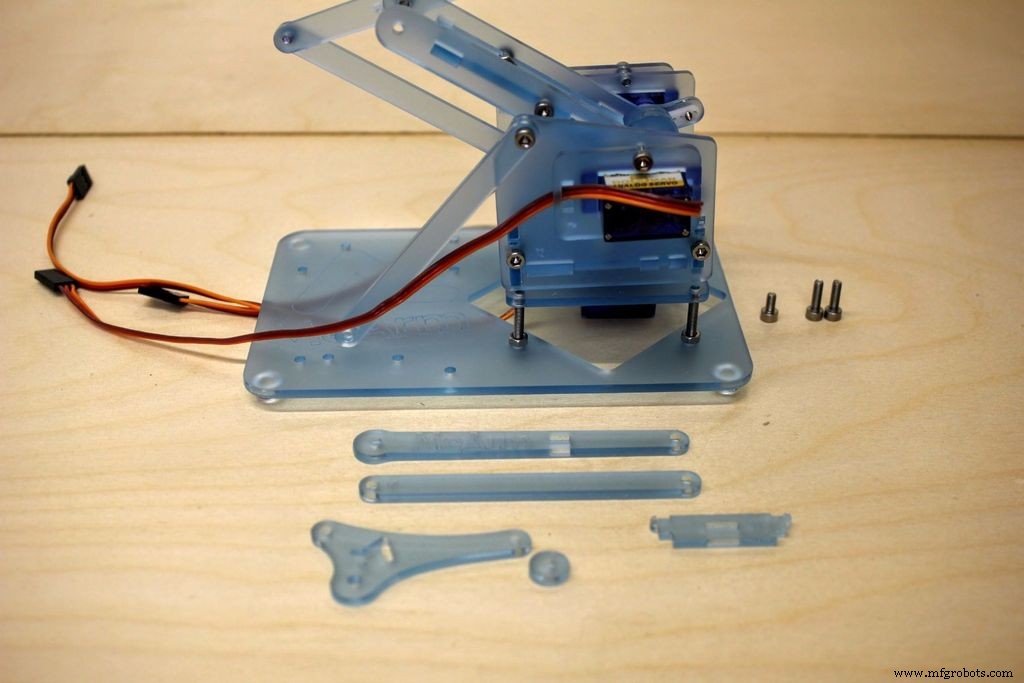
Zoek het grootste deel (#1) en bevestig de plakkerige voetjes aan de hoeken. Steek vervolgens de vier 20 mm-schroeven vanaf de onderkant in en schroef de vier moeren halverwege vast. Zoek nu deel #2, #3, je middelste servo en twee 8 mm schroeven. Rijg de servo door deel #3, dat we een kraag noemen. Duw de schroeven door de kraag en schroef ze vervolgens in onderdeel #2.
De schroeven tappen zichzelf in deel #2, dit betekent dat ze hun eigen schroefdraad snijden. Op de MeArm zijn er twee gatgroottes, een van ongeveer 3 mm waar je de schroef doorheen kunt duwen en de andere van ongeveer 2,6 mm waar we willen dat de schroef zichzelf tapt. Dit is een methode die we hebben geleend van de geweldige PlotClock van Joo.
Nu bevestigen we de servo / kraagconstructie aan onderdeel # 1 via de 20 mm schroeven, deze zullen zelftappen en de oriëntatie van de gaten op de onderdelen zou moeten betekenen dat je het niet verkeerd kunt krijgen. Dit wordt Poka-yoke genoemd en is een methode om ontwerpen waterdicht te maken. Als je een vroeg model v1.0 hebt, zul je zien dat mijn poging hiertoe te ijverig is, omdat er maar 1/8 manieren zijn om het goed te krijgen (als je de gaten niet kunt matchen, draai je het onderdeel om). Latere versies werden getemperd door het advies van Scott Pierce en hebben 1/2 manieren.
Stap 4:Linkerkant
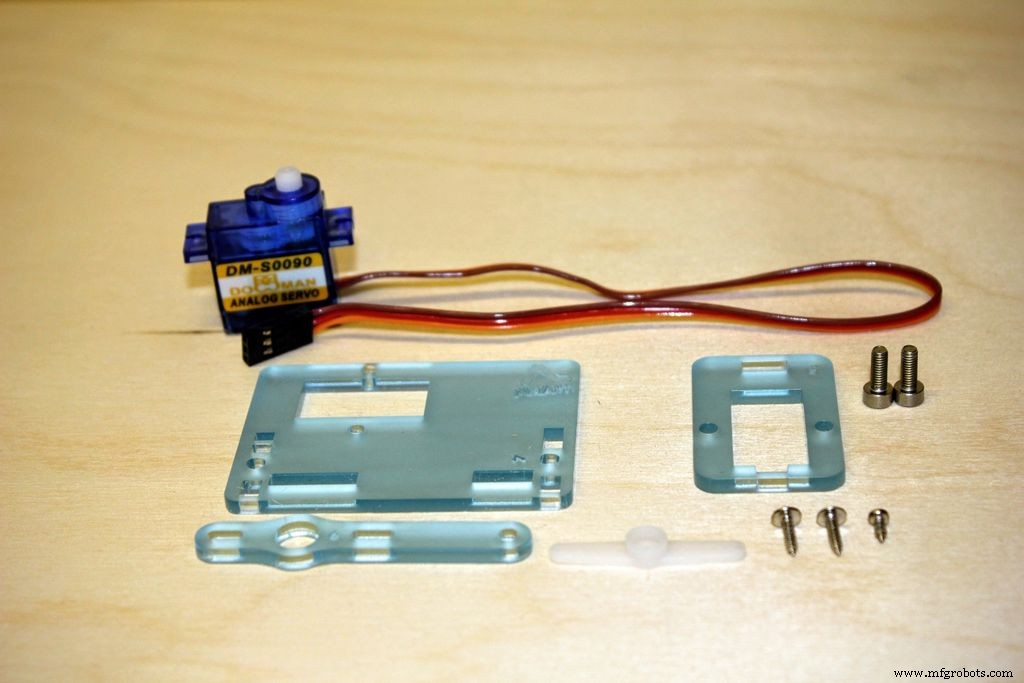

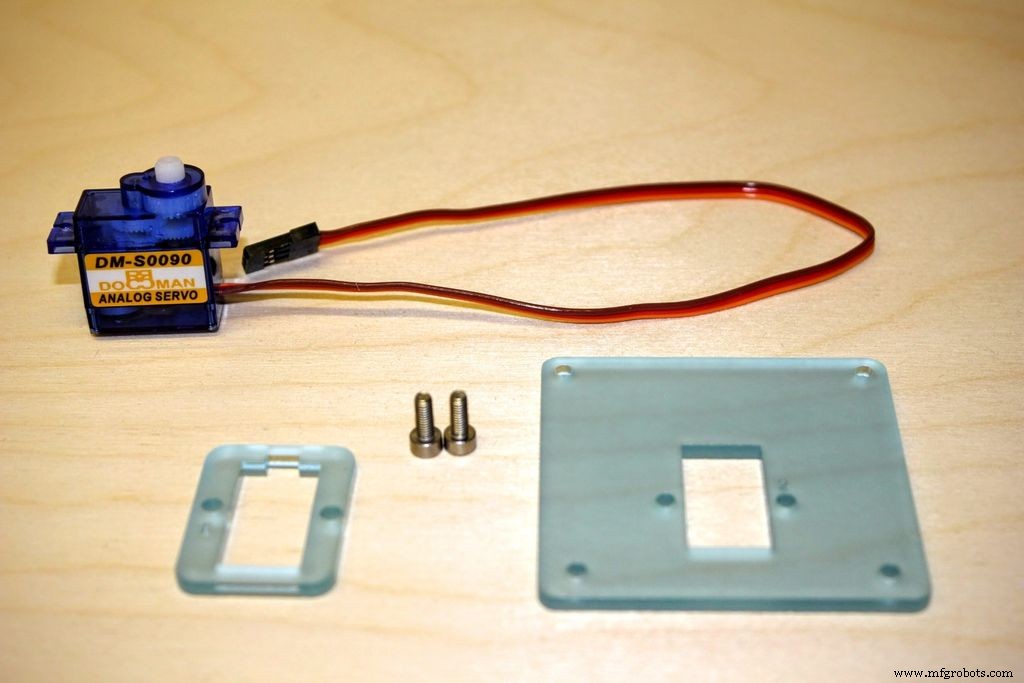
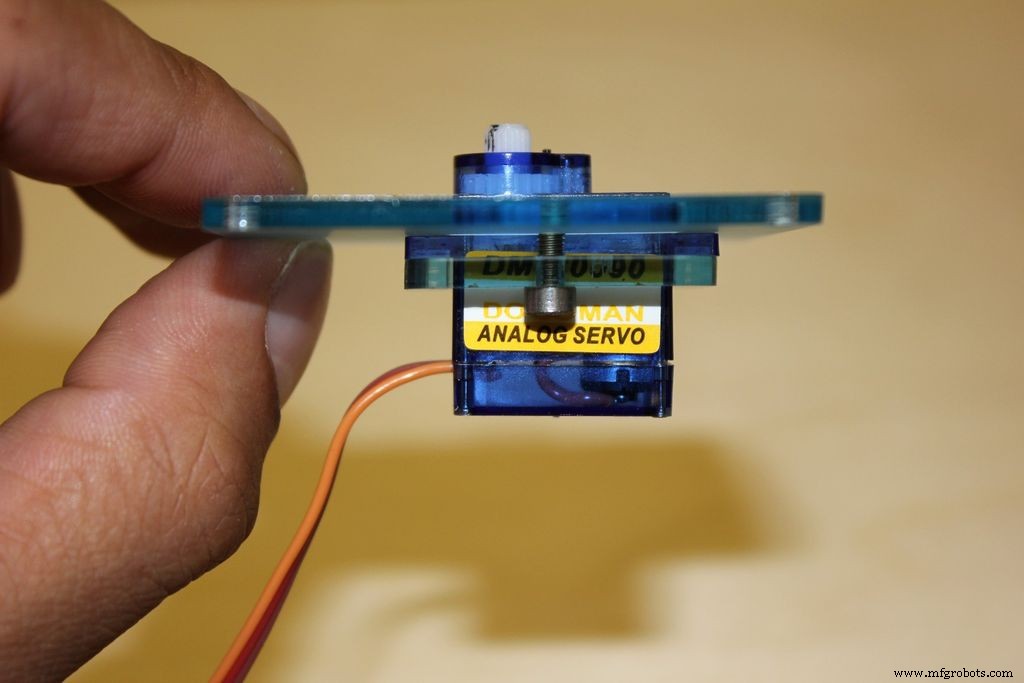
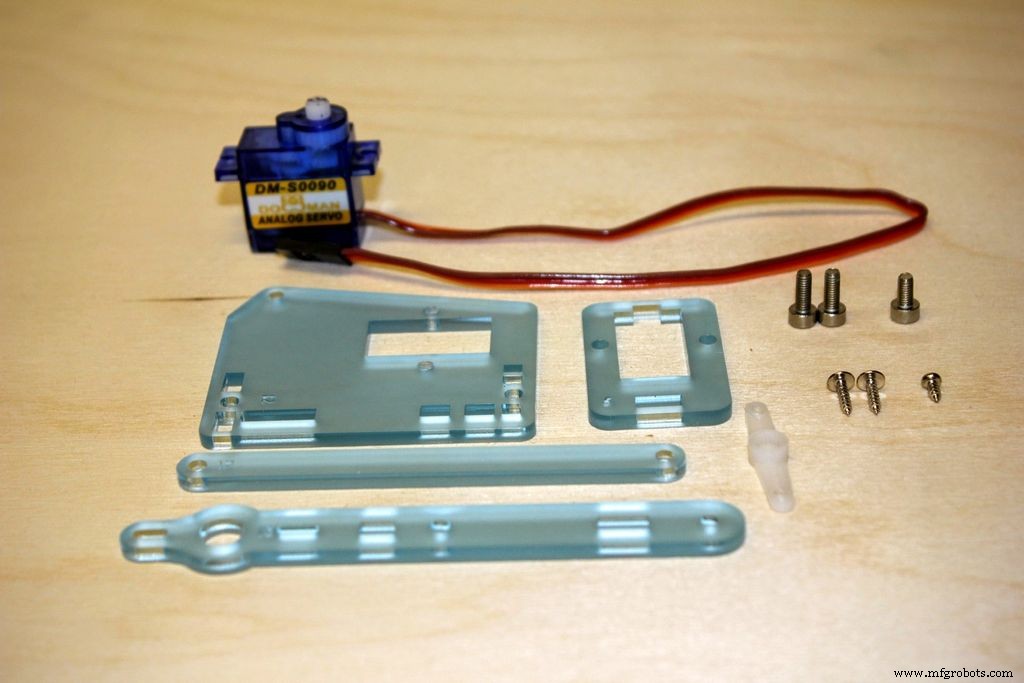
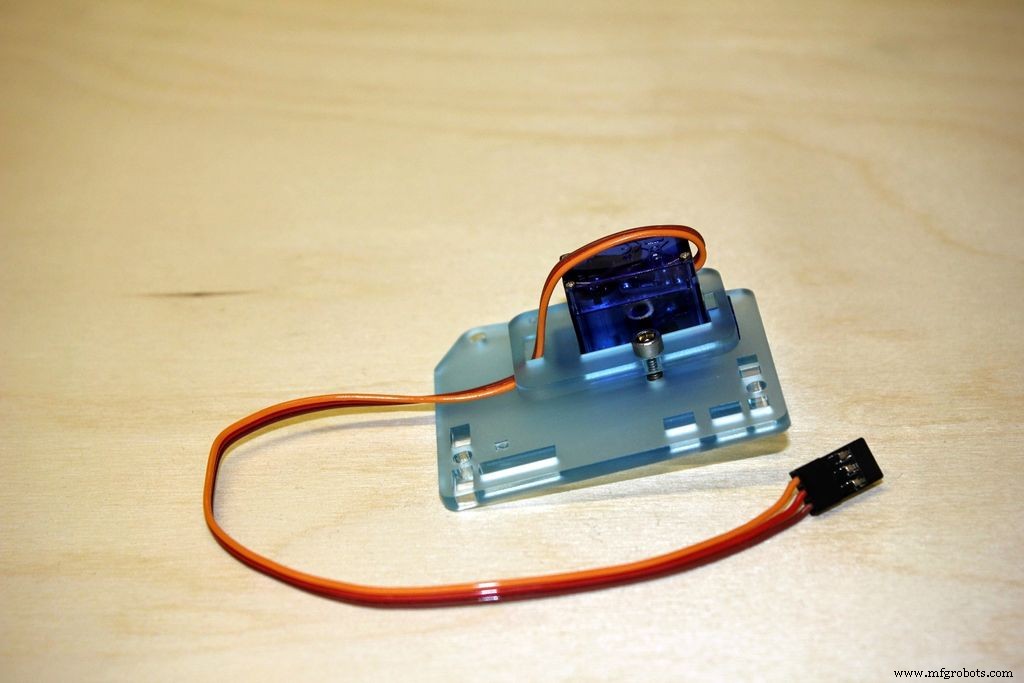
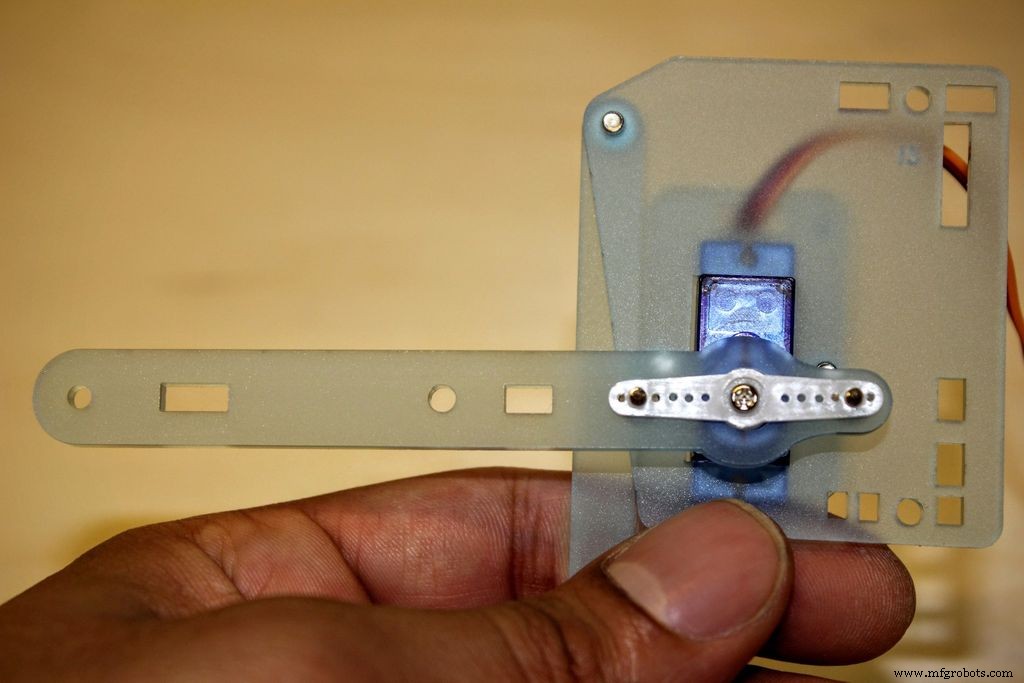
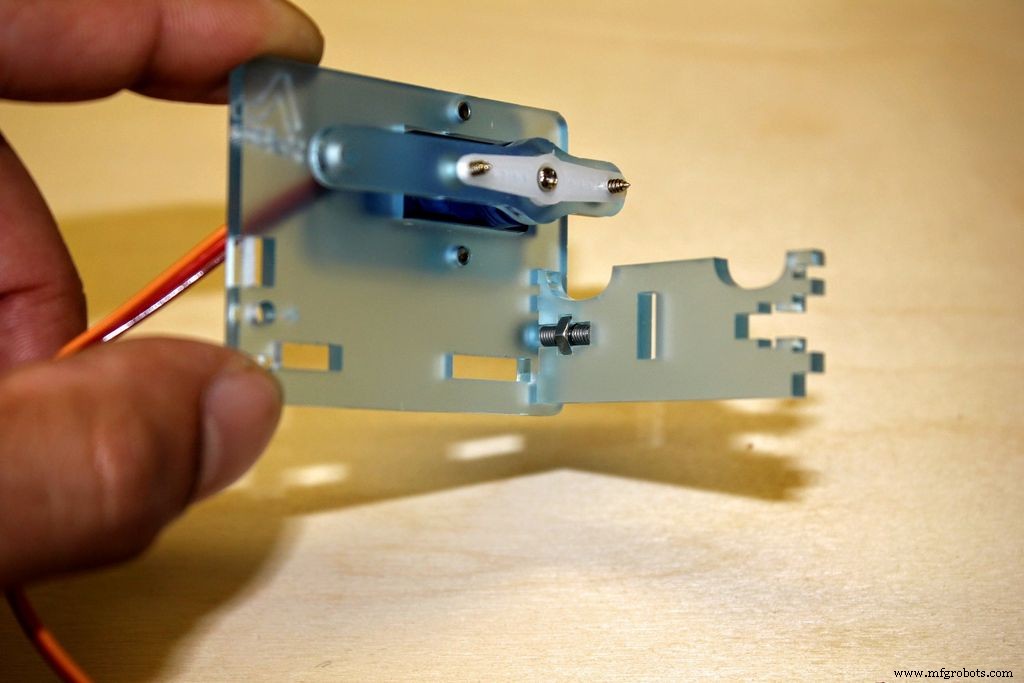
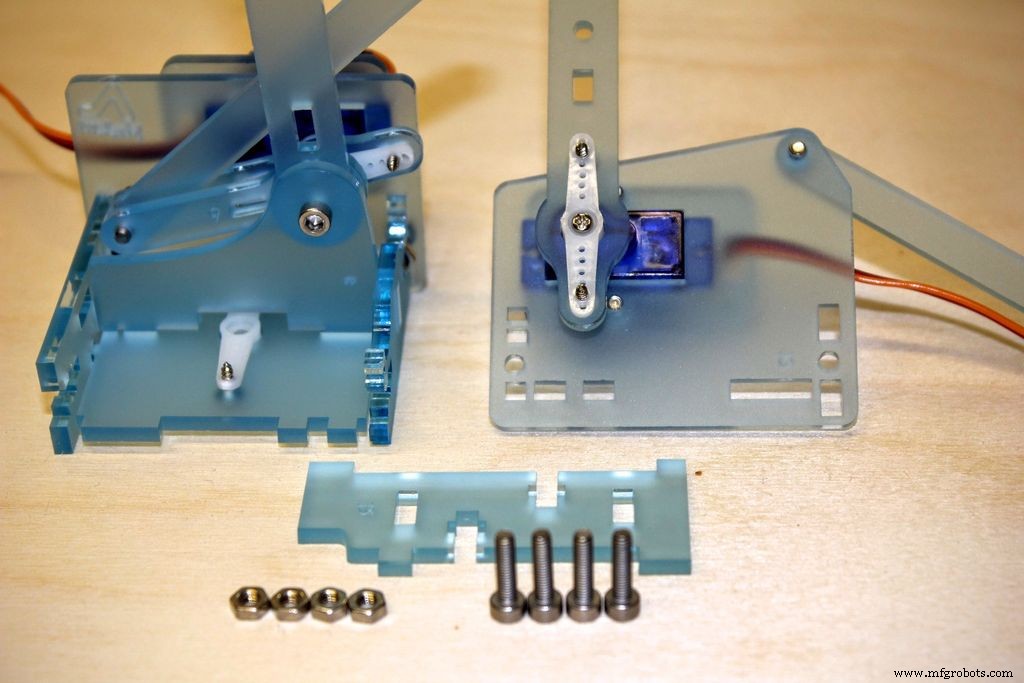
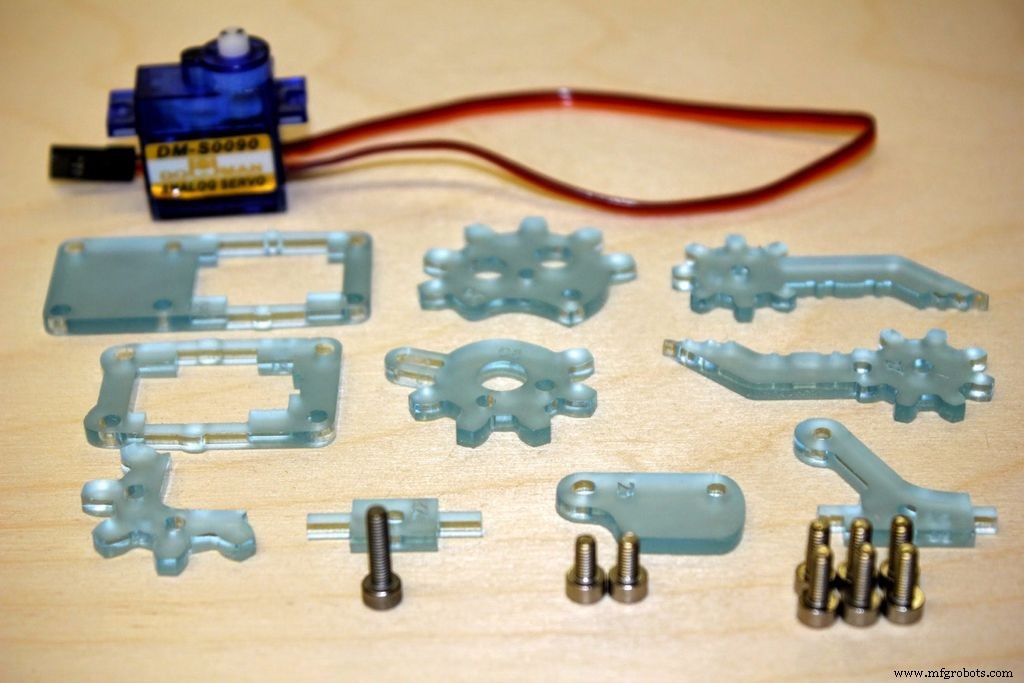
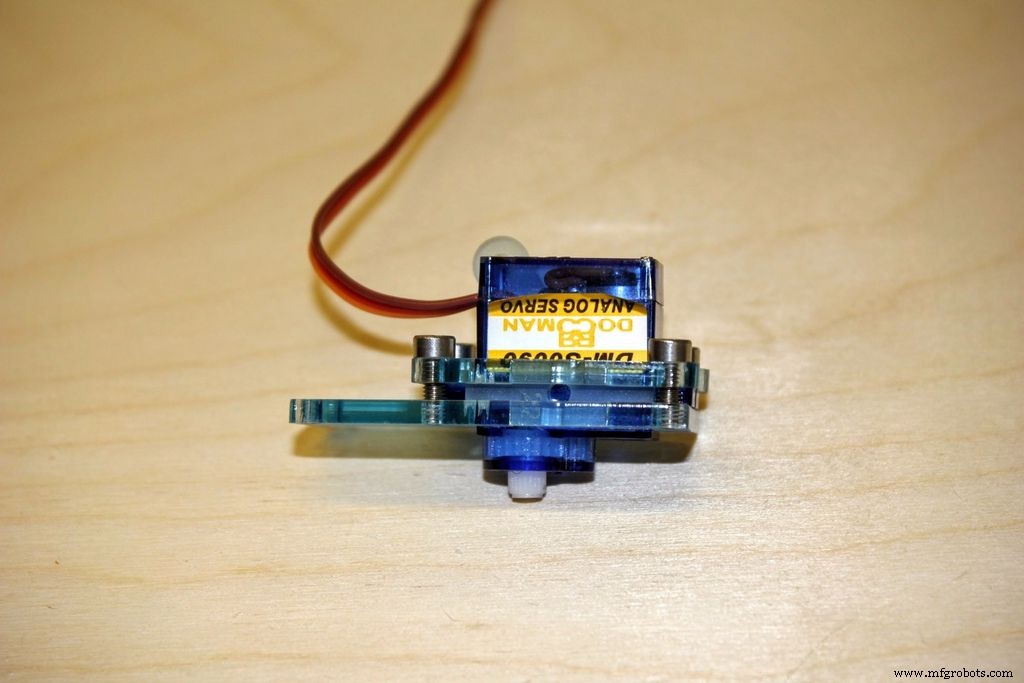
Zoek nu onderdelen #4, #5, #6, linker servo, twee 8 mm schroeven en een servo-bevestigingspakket.
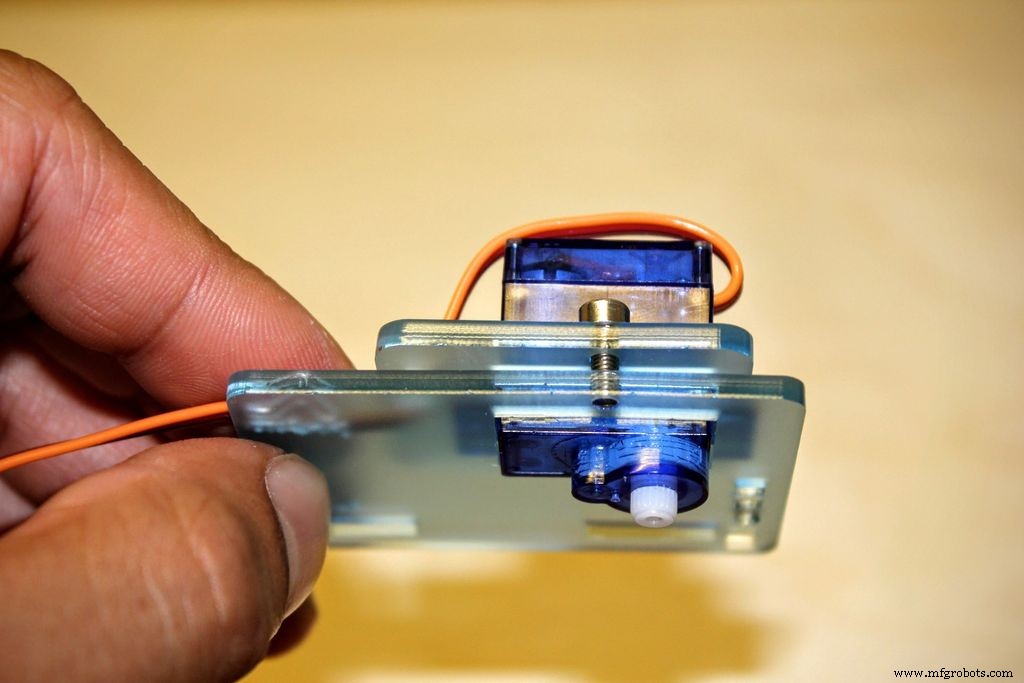
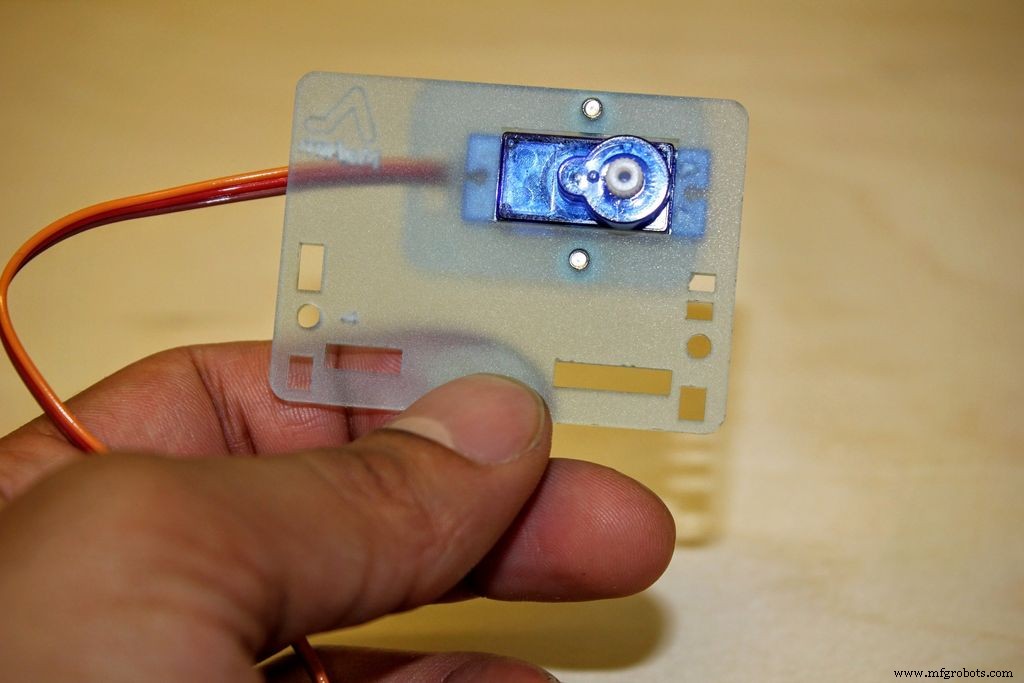
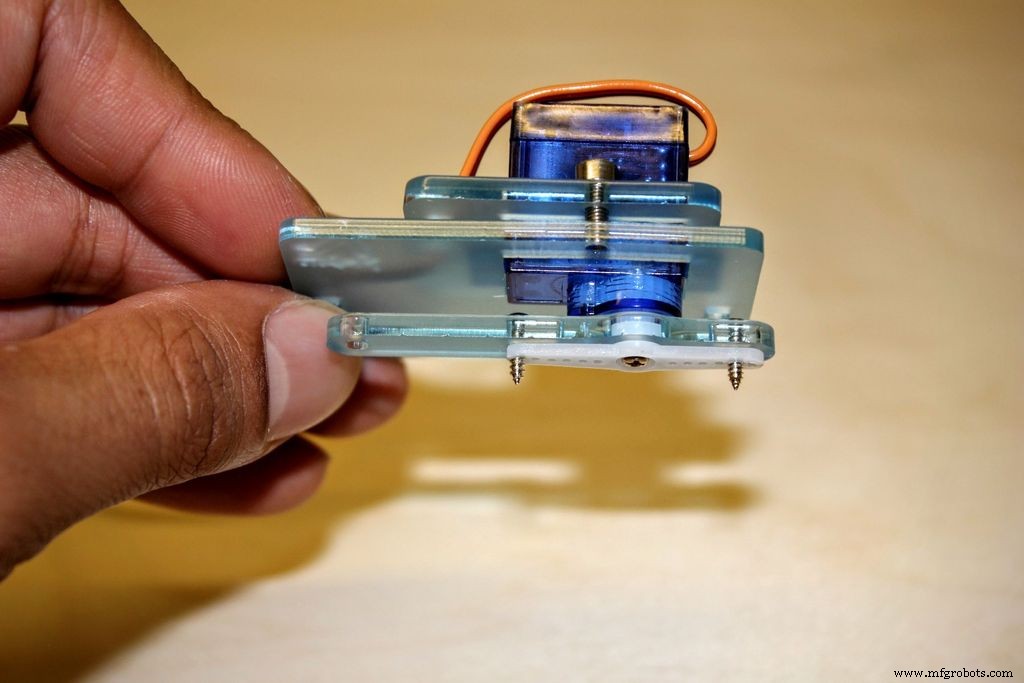
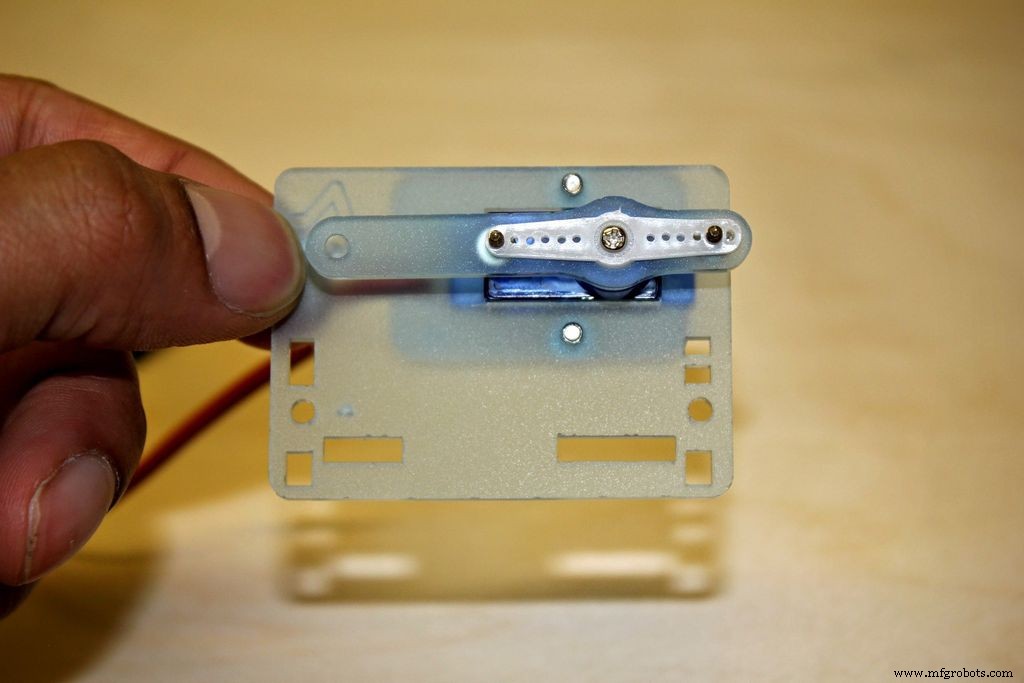
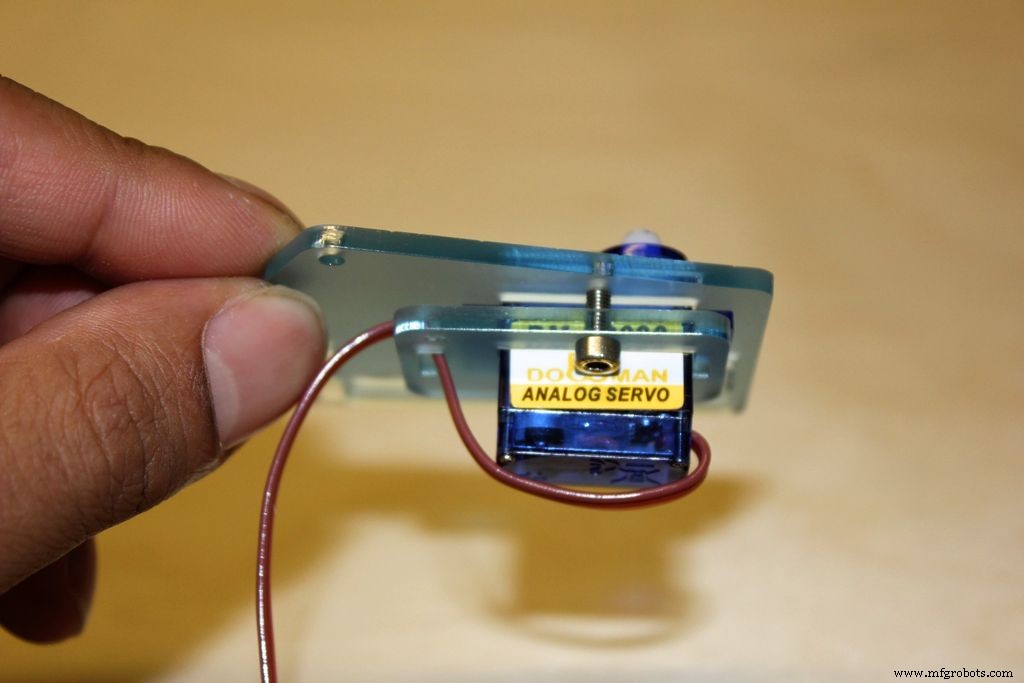
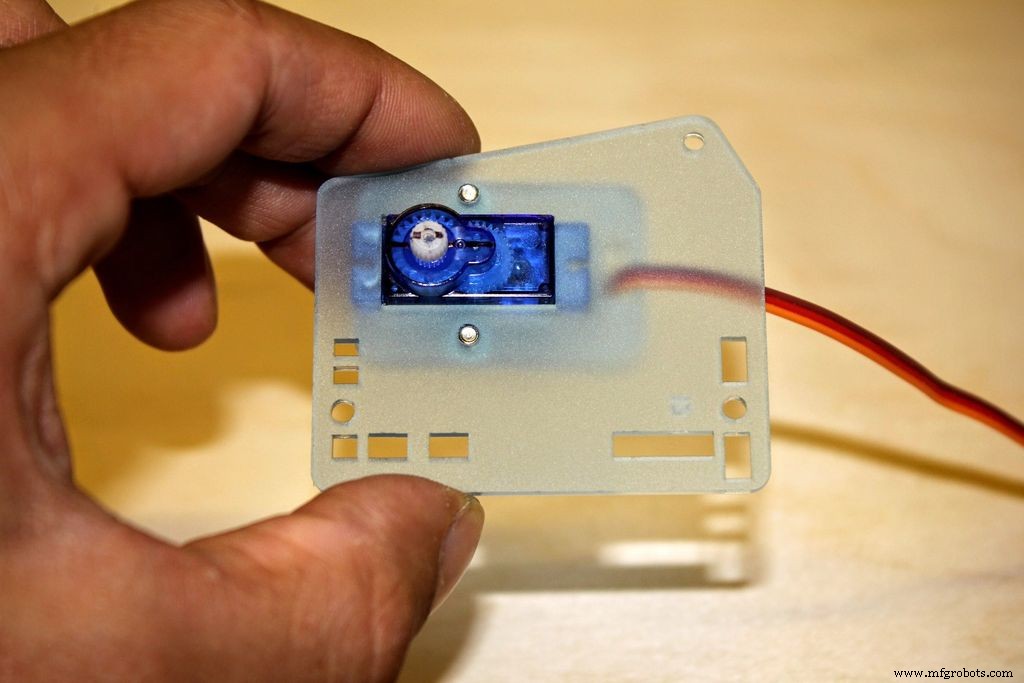
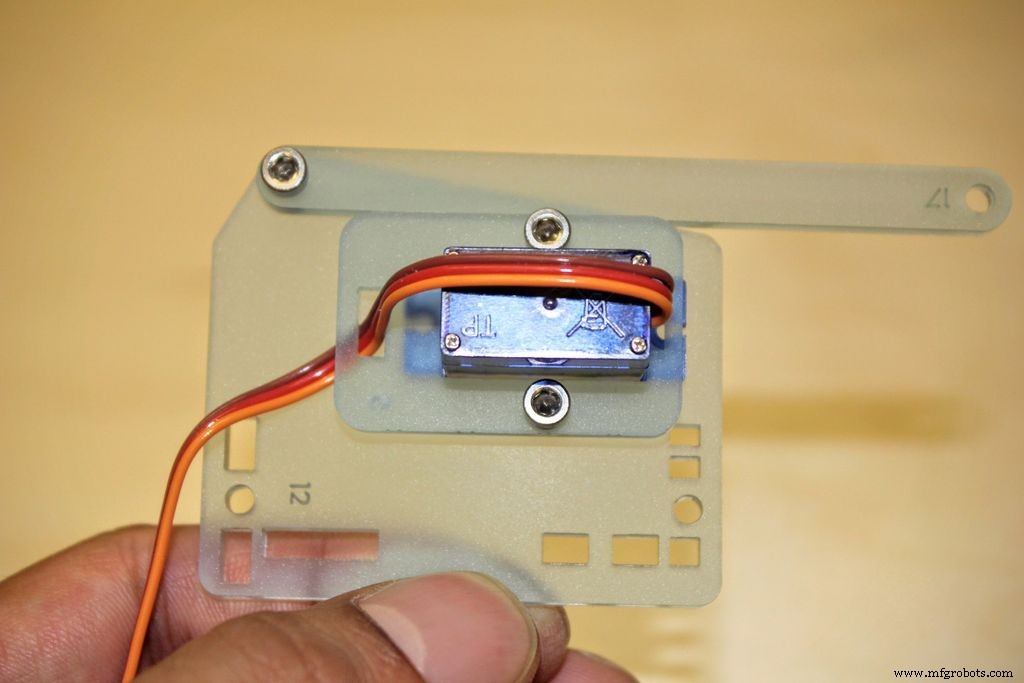
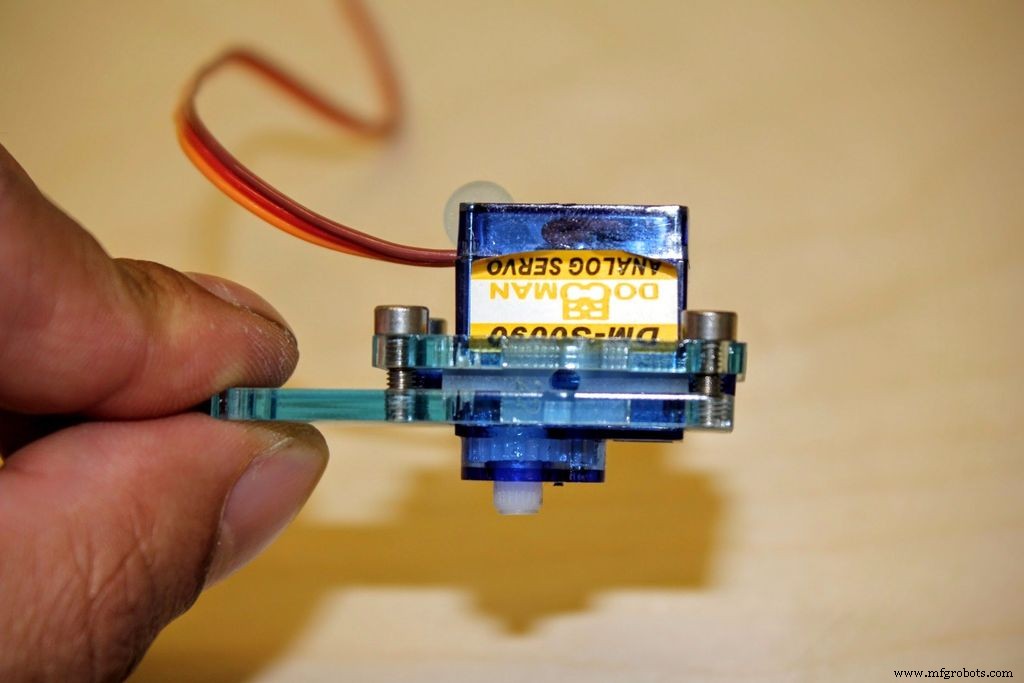
Steek de servo door de kraag (onderdeel #5) en vervolgens de servokabel door het kabelgat. Schroef de kraag vast aan onderdeel #4 met behulp van de 8 mm schroeven zorg ervoor dat u ze niet te vast aandraait . Je wilt niet dat het acryl buigt, houd de servo gewoon op zijn plaats.
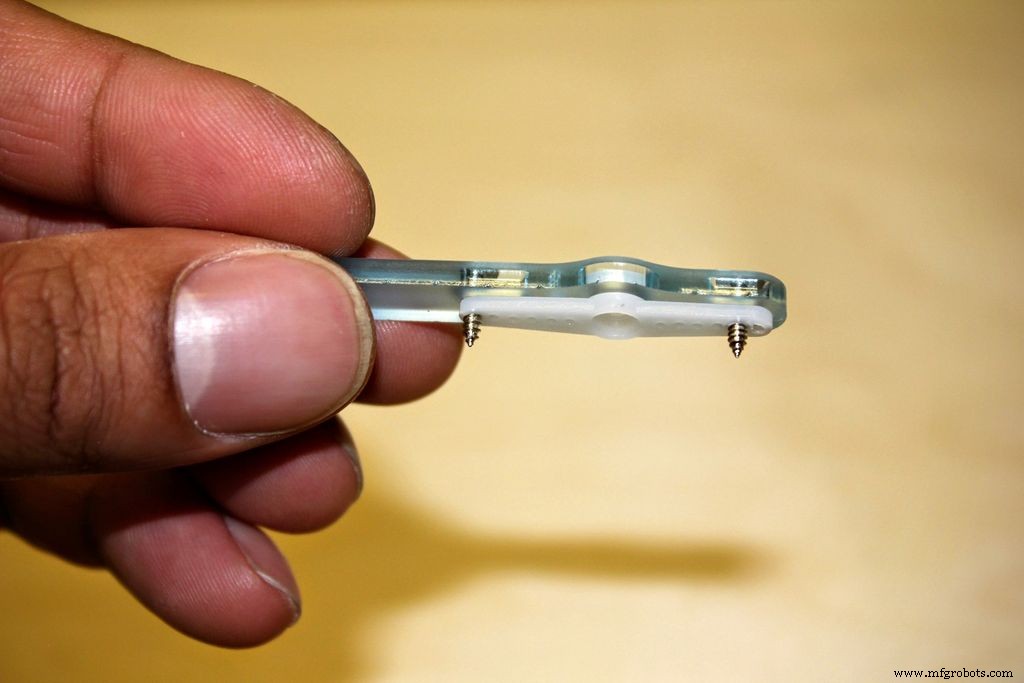
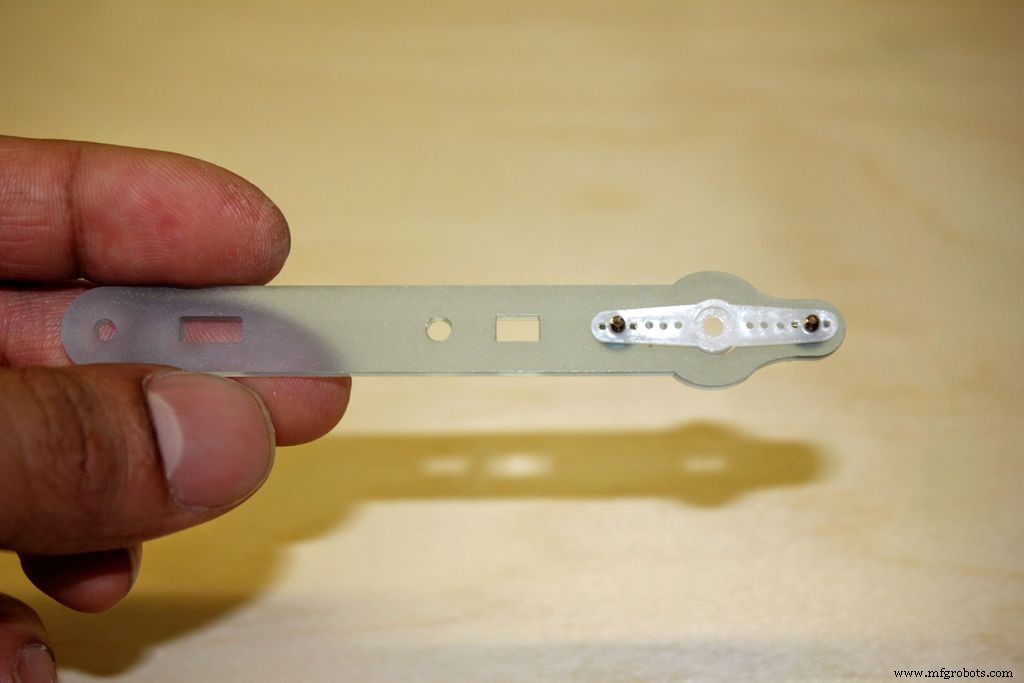
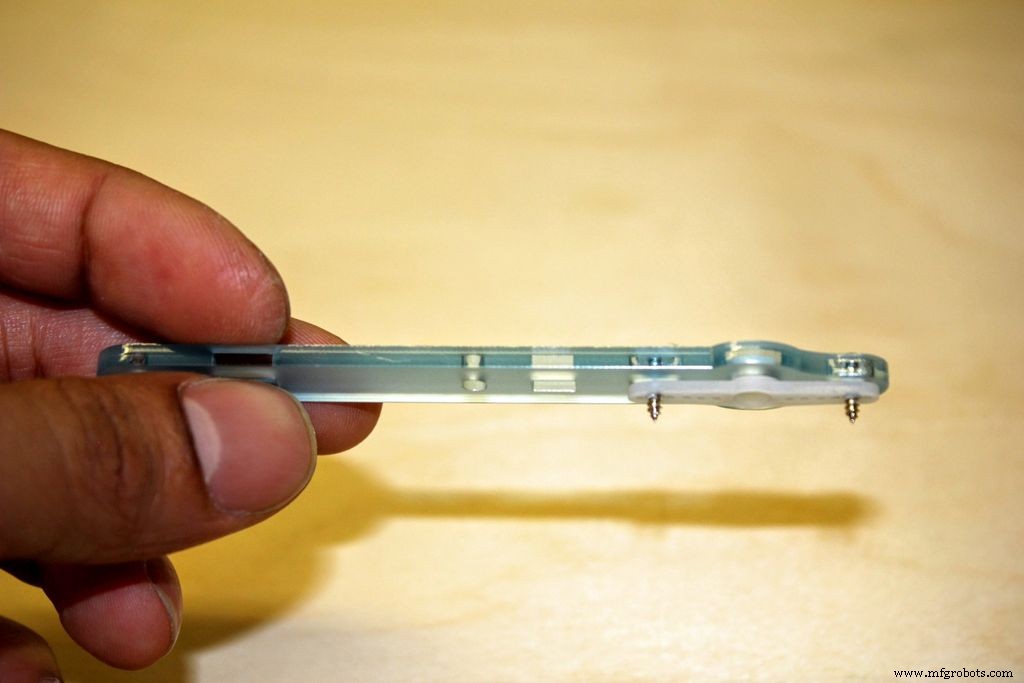
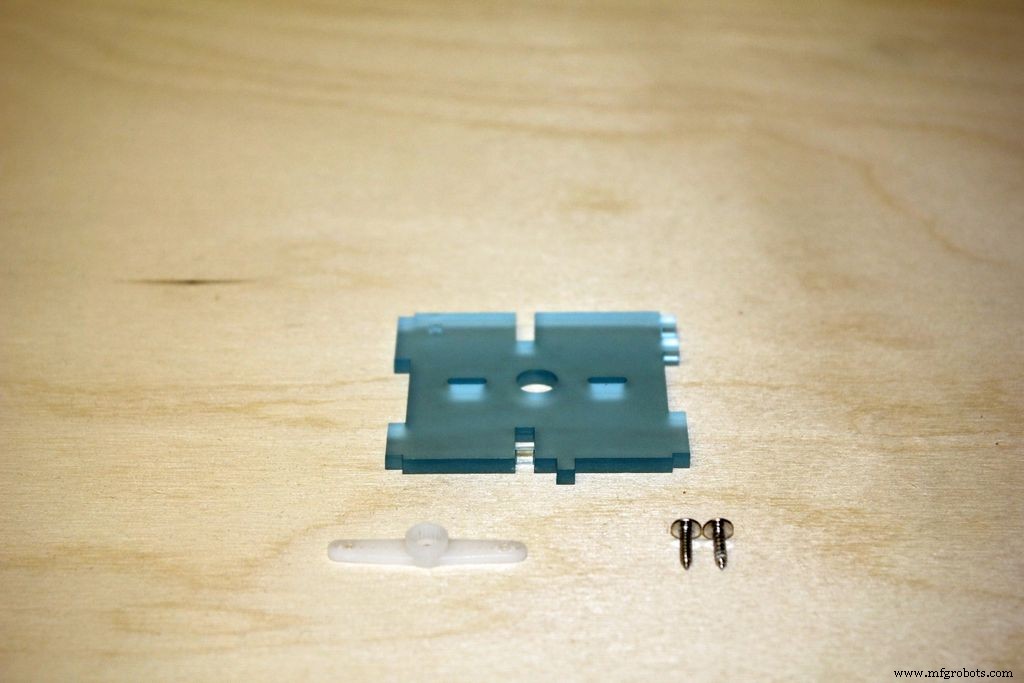
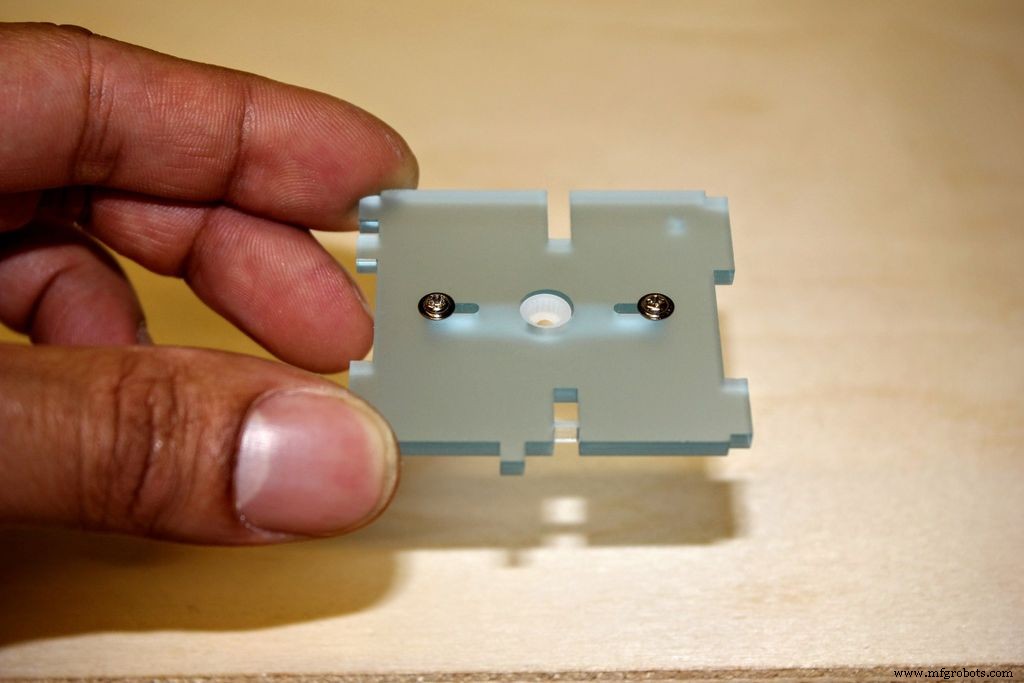
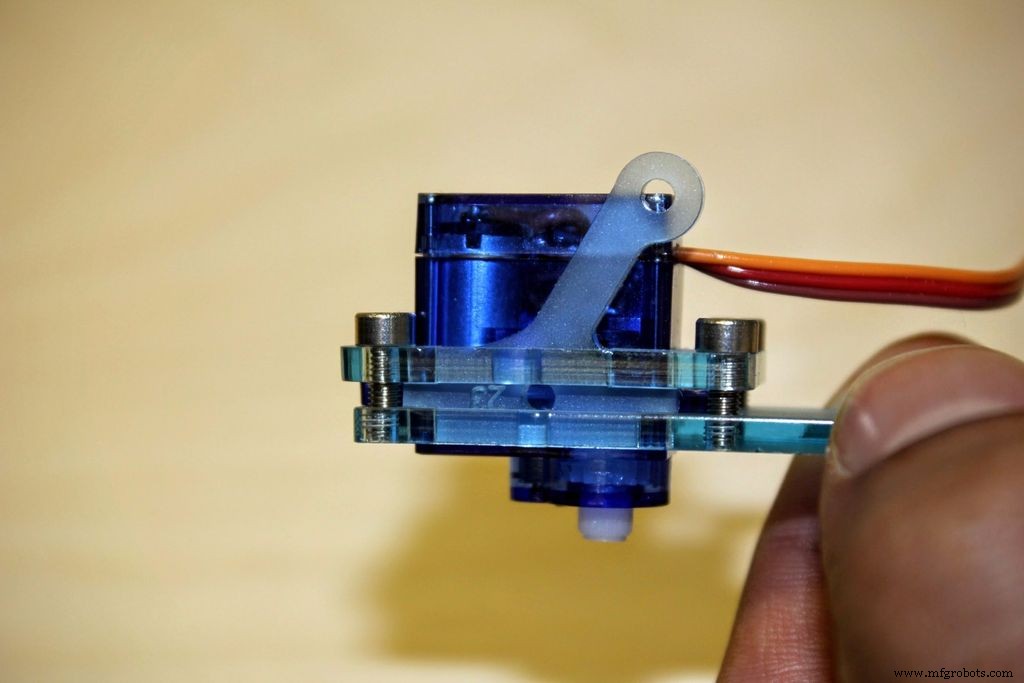
Bevestig nu de servo-bevestiging (het witte ding, ze worden hoorns genoemd) aan de servo-arm (#6) met behulp van de scherpe schroeven uit het servo-bevestigingspakket. Deze tikken vanzelf in de witte plastic servohoorn. Ze kunnen een beetje lastig zijn, dus wees hier voorzichtig. Als je met een kind aan het bouwen bent, dan is dit op tijd dat je mee wilt doen.
Bevestig de servobevestiging aan uw gekalibreerde servo zoals afgebeeld, deze moet evenwijdig zijn aan de langste zijde van deel #4 en de lijnen die u eerder hebt getekend, moeten nog steeds overeenkomen. Gebruik de kleine machineschroef uit het servopakket om het aan de servo te bevestigen, maar draai het opnieuw niet te vast!
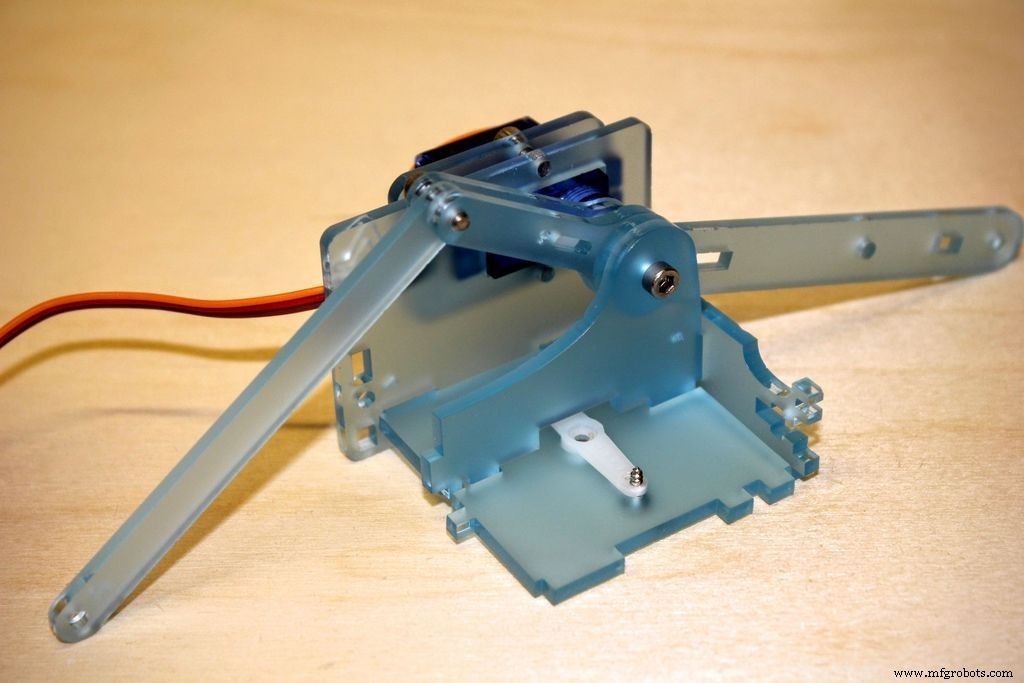
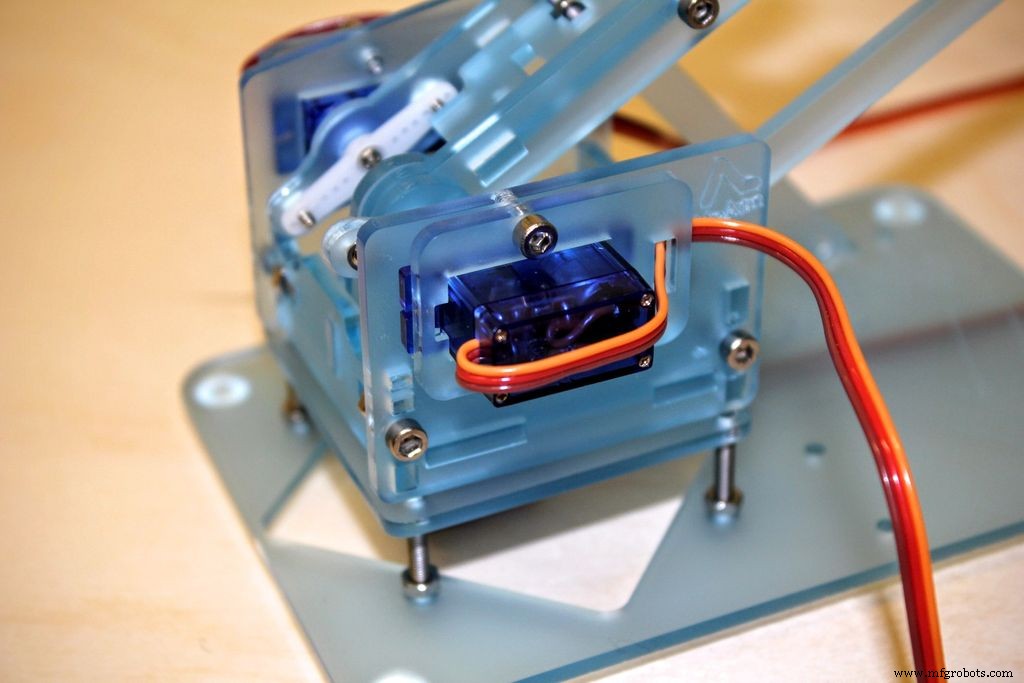
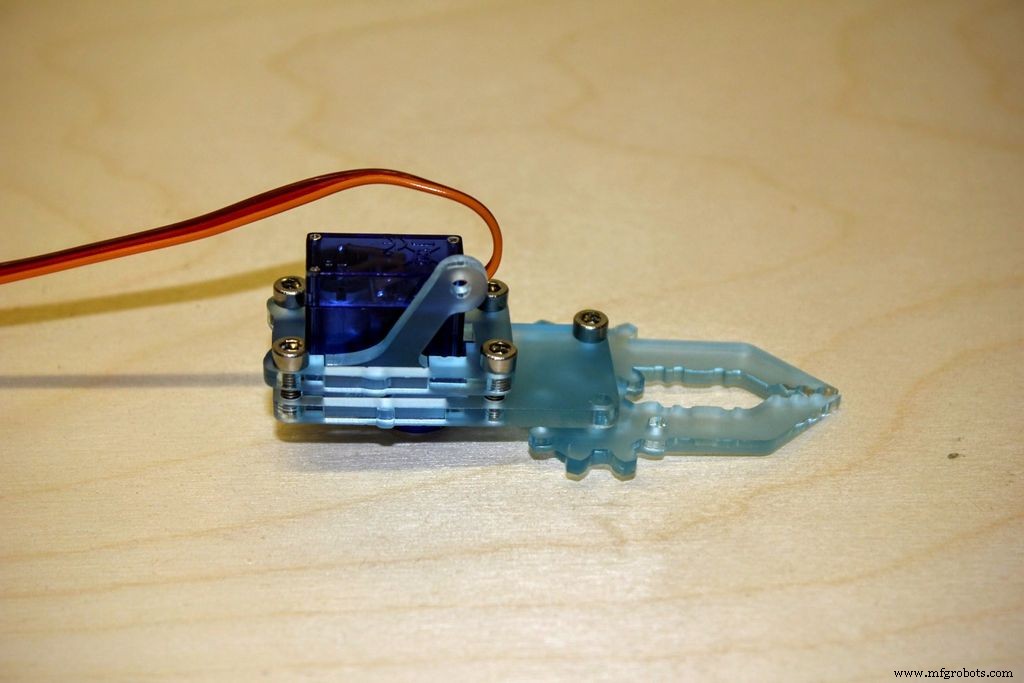
Stap 5:Rechterkant
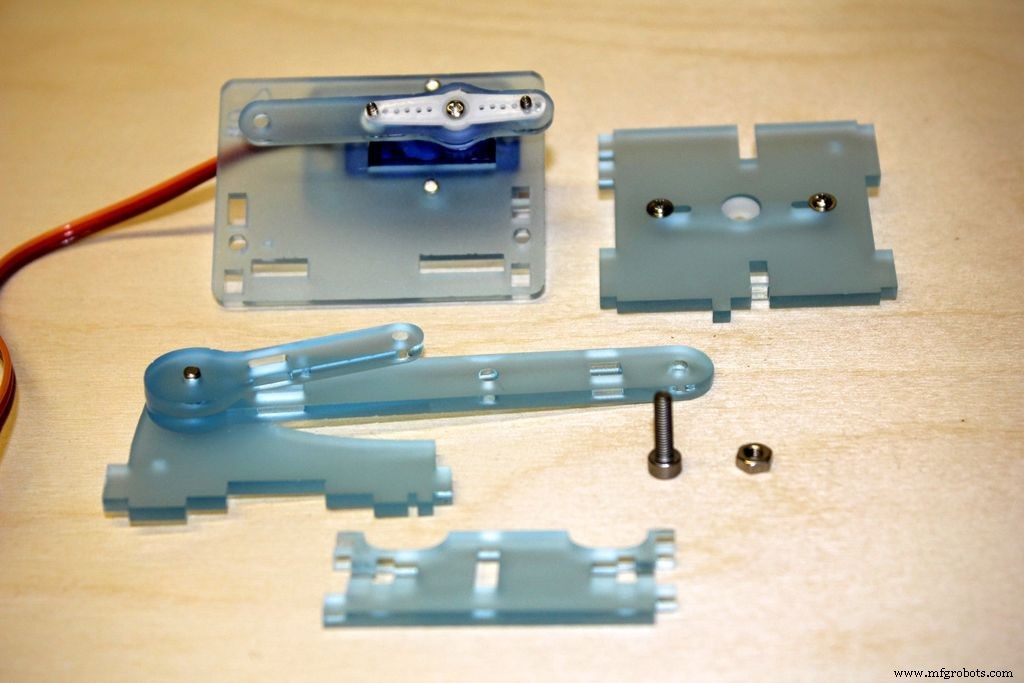
De onderdelen die we hier willen zijn:
#5, #12, #13, #17, twee 8 mm schroeven, een 6 mm schroef, de rechter servo en een servobevestigingspakket.
Leid de servo door de kraag en de kabel door de kabel, netjes zoals eerder, bevestig aan de zijplaat met de 8 mm schroeven, en zorg er opnieuw voor dat u de plaat niet breekt door te vast aan te draaien. Bevestig de witte servohoorn aan de servo-arm (#13) met behulp van de scherpe schroeven zoals eerder. Bevestig deze aan de servo met de arm op 90 graden ten opzichte van de langste zijde van de zijplaat. Nogmaals, de zwarte lijnen die je hebt gemaakt, moeten op één lijn liggen.
Bevestig in deze fase tenslotte onderdeel #17 aan de zijplaat met behulp van de 6 mm schroef.
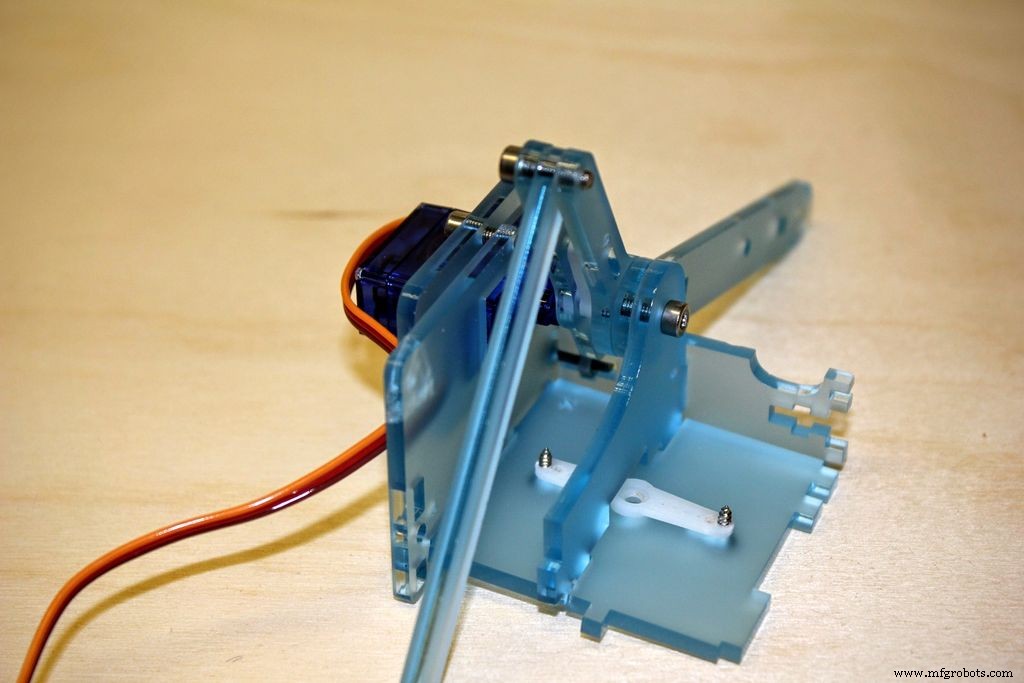
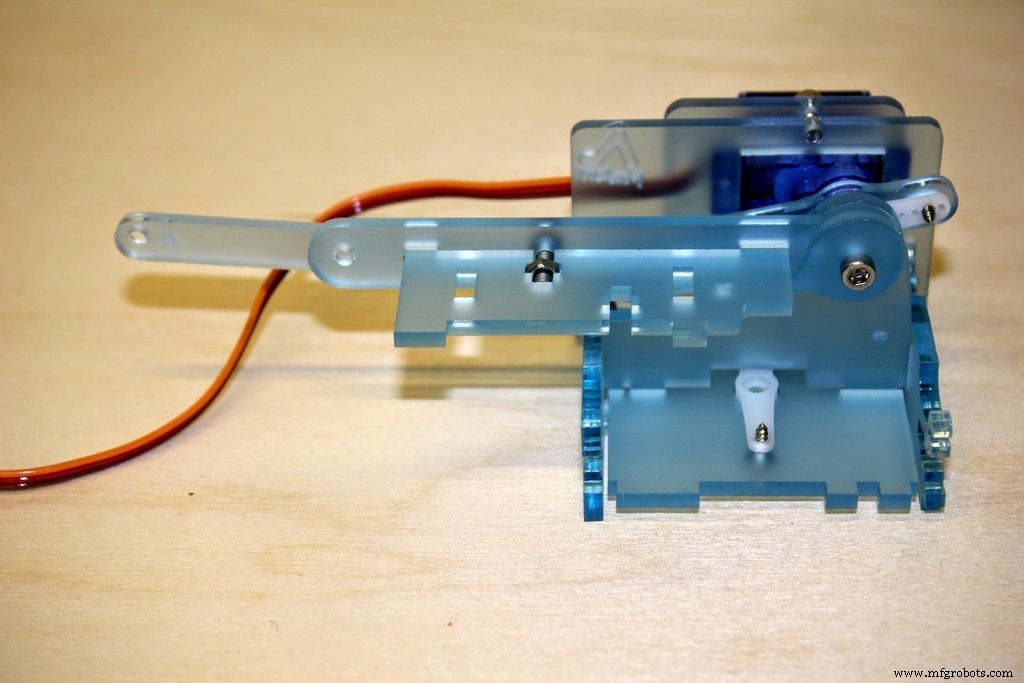
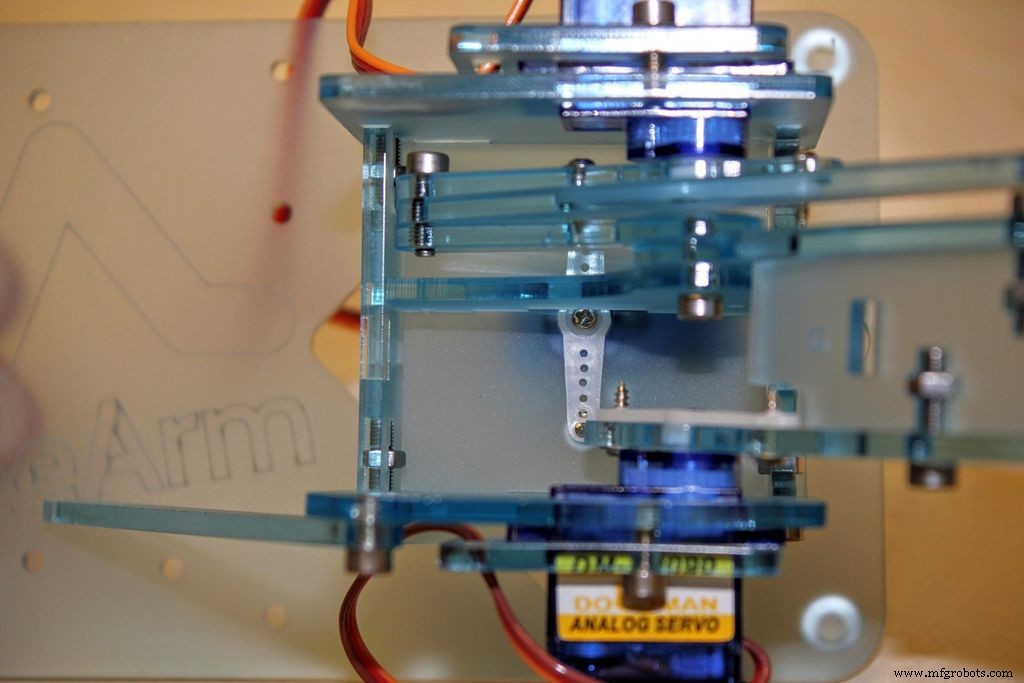
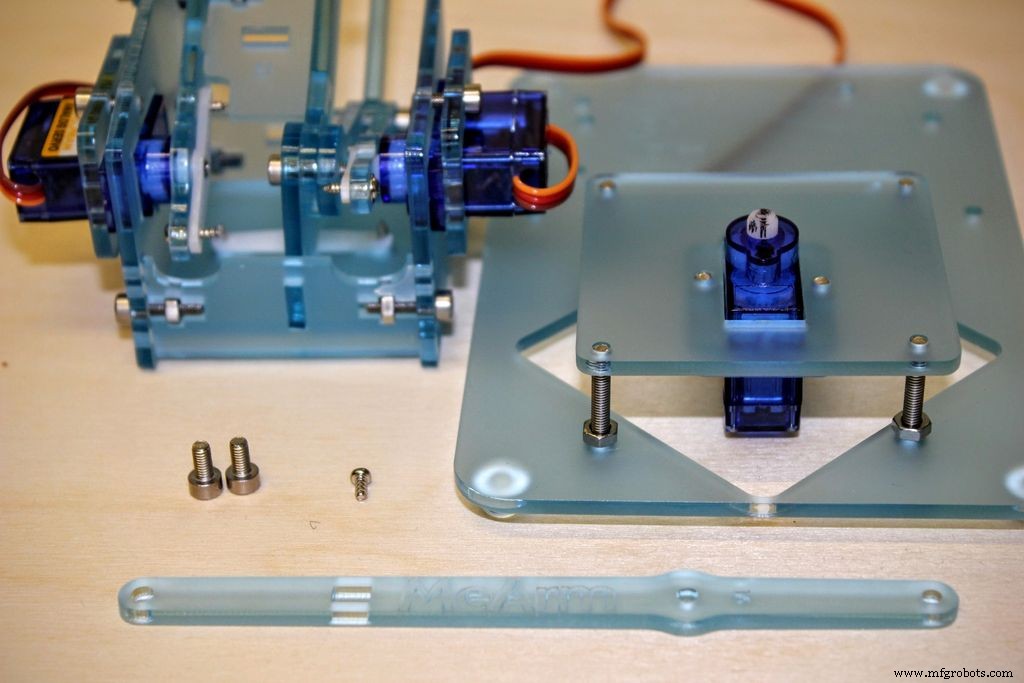
Stap 6:Bouw het midden
Deze delen verbinden de linker- en rechtersectie met elkaar. We noemen ze de basis en het varken.
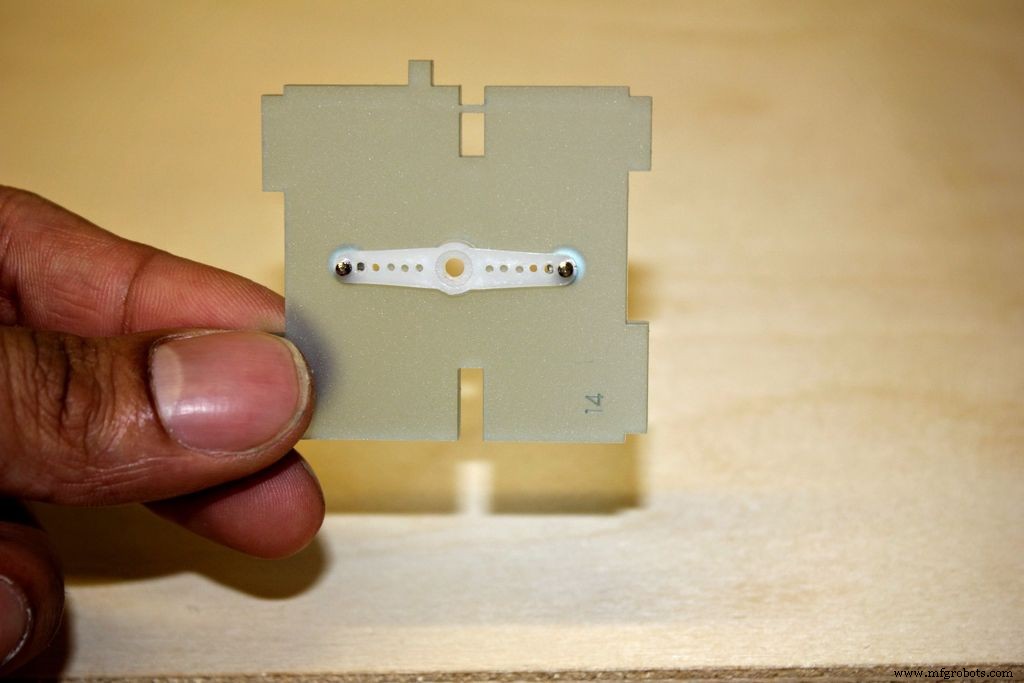
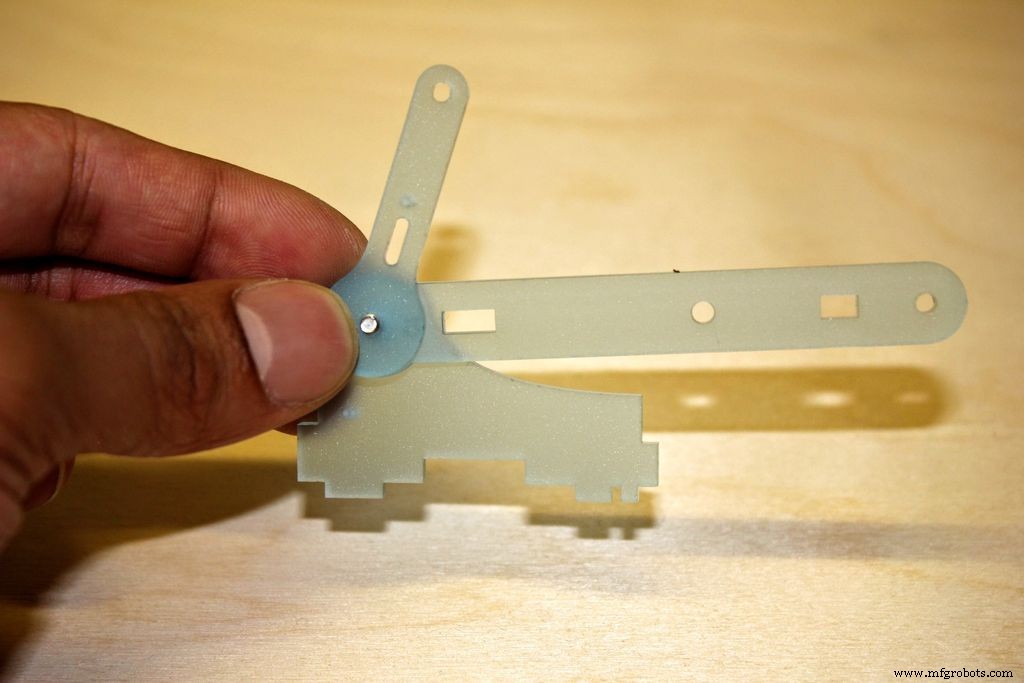
Voor de basis vind je onderdeel #14 en een servobevestigingspakket. Let goed op de richting en bevestig de servohoorn met behulp van de scherpe schroeven. Bied het in dit stadium aan het linker zijstuk aan om te zien of je de juiste dingen hebt gedaan. De Poka-yoking zou je hier de weg moeten wijzen.
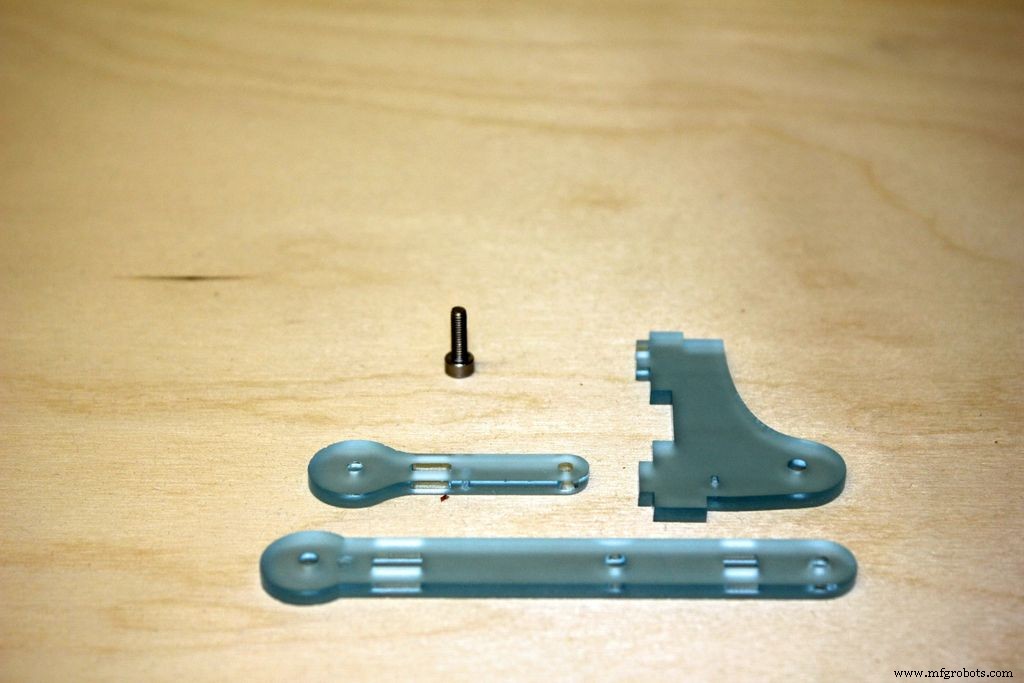
Zoek voor het varken onderdelen #8, #9, #10 en een schroef van 10 mm. Schroef ze aan elkaar in de getoonde volgorde, wat #9, #10, #8 zou moeten zijn, waarbij de schroef vanaf de #8-zijde naar binnen komt en zichzelf in #9 tapt. Sorry dat de volgorde daarvan verwarrend is, maar dit is eerlijk gezegd de eerste keer dat ik dat opschrijf met de cijfers! Het is belangrijk dat deze in een rechte lijn om de as (de schroef) bewegen en vrij kunnen bewegen. Als ze niet in een recht pad bewegen, schroef ze dan los, houd ze bij elkaar en schroef ze weer vast, zodat ze allemaal zo parallel mogelijk zijn.
Stap 7:Links naar midden
Nu willen we beginnen met het samenbrengen van de linker- en rechterdelen met behulp van de middelste delen.
Bevestig eerst de linkermontage aan onderdeel #7 met een 12 mm schroef en moer. De eenvoudigste manier om dit te doen, is door de 12 mm-schroef door de linkerconstructie te duwen en de moer een halve slag of zo vast te draaien. Plaats de gleuf in onderdeel #7 over de moer en begin met het vastdraaien van de schroef. Draai niet te vast.
Je zou de gleuf voor het varken op onderdeel #7 (de voorste steun) moeten zien. Plaats de pig in de gleuf en steek het basisgedeelte in de sleuven op de linkerconstructie en hef hem naar boven om de sleuven op de pig te verbinden. Controleer de servohoorn hier nogmaals, als je hem ondersteboven hebt, zul je later echt geïrriteerd raken.
Met de pig op zijn plaats kunt u een hendel (#17), een optionele afstandhouder (#20) aan de servohendel (#6) en de hendel op de pig (#9) bevestigen, samen met een 12 mm of 10 mm schroef, afhankelijk van of je hebt de afstandhouder nodig. De hier getoonde Doman-servo's hebben geen spacer nodig, maar de nieuwste servo's die we gebruiken wel. Hiervoor zitten er reserveonderdelen in onze verpakking.
Bevestig nu de achterste veerpoot, onderdeel #11 met een 12 mm schroef en moer zoals op de voorste veerpoot. Het moet over de achterkant van het varken passen en ook over de noppen op de grondplaat. Draai dit vast maar laat een beetje speling, want de aanpassing zal van pas komen als je het rechterhandgedeelte koppelt.
Stap 8:Rechts bevestigen
Nu koppelen we de rechterkant aan onze complexe assemblage, dit houdt ook in dat het webbing onderdeel #15 wordt aangebracht.
Bevestig onderdeel #15 aan onderdeel #10 (op het varken) met een 12 mm schroef en moer.
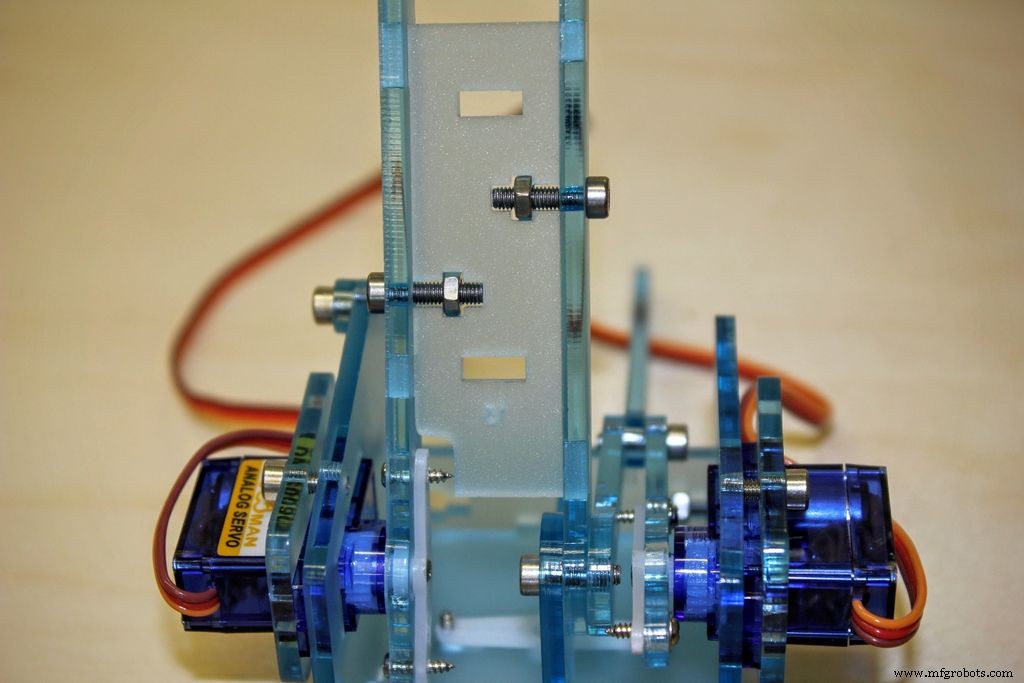
Nu komt het bevestigen van de rechterkant aan de rest van de montage. Je kunt de 12 mm schroeven en moeren door de rechterkant steken voordat je de onderdelen probeert te koppelen, of je kunt ze eraf laten en ze erna weer aanbrengen. Hier probeer je een aantal onderdelen tegelijkertijd in slots te krijgen en dat kan lastig zijn
Neem de tijd en heb geduld alstublieft. Deze stap is de meest lastige van de hele build. Als je dit eenmaal hebt gedaan, wordt het makkelijker, dat beloof ik!
Stap 9:Bevestig aan de basis, voeg linker onderarm toe
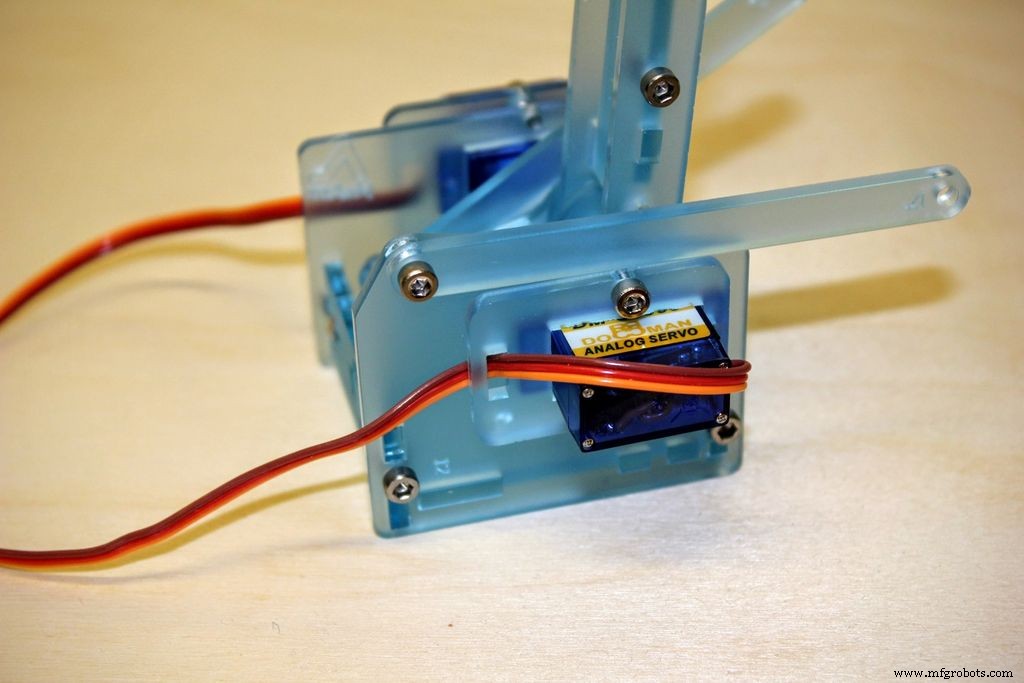
Nu we de mooie middenmontage hebben voltooid, kunnen we hem op de basis schroeven.
Dit is een kwestie van de servohoorn aan de middelste servo koppelen en met een schroef vastzetten.
Nu kunnen we onderdeel #16 toevoegen met behulp van twee 6 mm schroeven. Dit zal op deel #10 en op #17 worden geschroefd. Met dit nieuwe onderdeel zou je de servo gemakkelijk moeten kunnen verplaatsen!
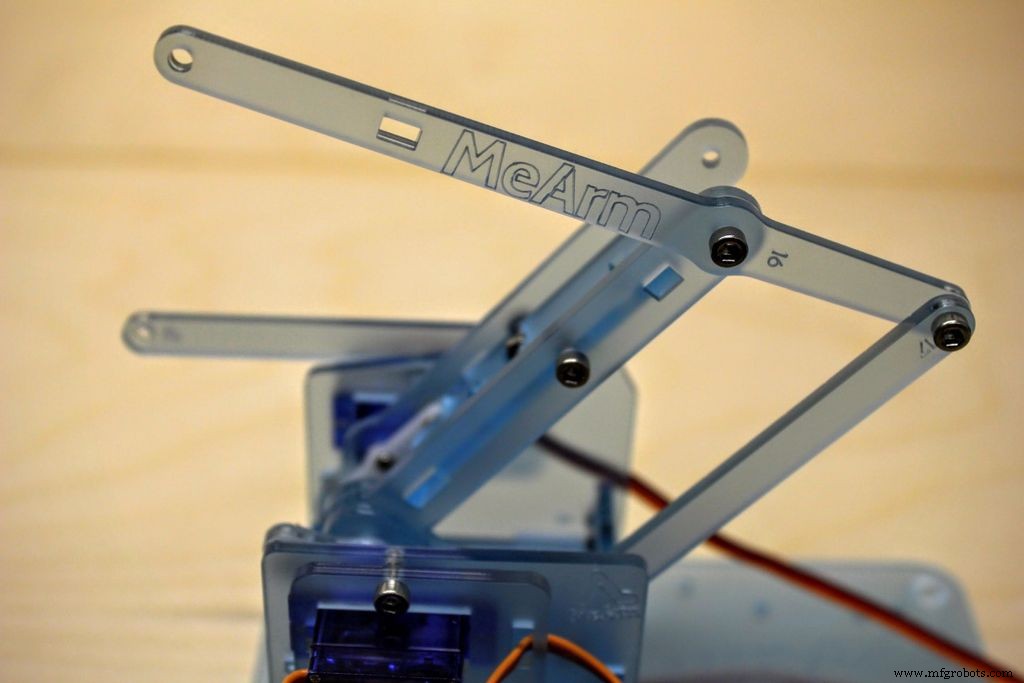
Stap 10:Rechter onderarm


Vervolgens bouwen we de rechter onderarm.
Het eerste dat u moet doen, is onderdeel #18 aan het linker onderarmgedeelte vasthaken dat u zojuist hebt bevestigd en vervolgens aan de rechter onderarm, die we onderdeel #31 zullen noemen omdat het niet genummerd lijkt te zijn!
Bevestig het driehoekige deel #19 aan deel #31 en aan deel #13 (het bit dat aan de servo is bevestigd) met een schroef van 10 mm. Draai niet te vast, want we hebben al deze onderdelen nodig om vrij te kunnen bewegen.
Bevestig de achterkant van onderdeel #19 aan onderdeel #17 dat is bevestigd aan de rechter zijpastei, gebruik een 10 mm schroef en een afstandsstuk (#20) ertussen.
Bevestig vervolgens het laatste onderdeel #17 aan de binnenkant van de voorkant van onderdeel #19 met een 6 mm schroef.
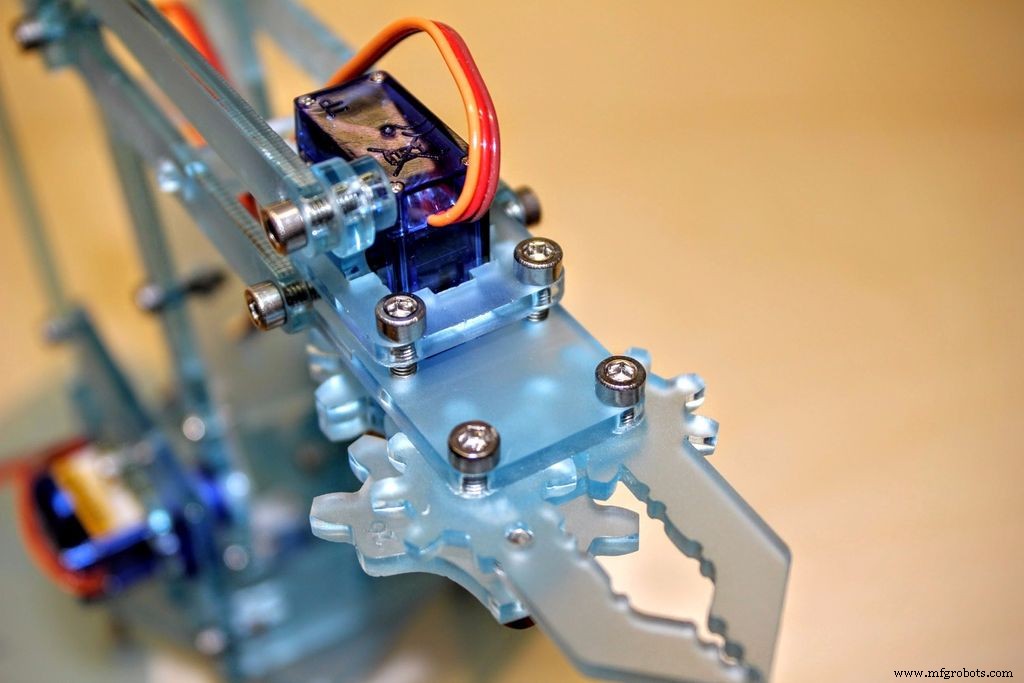
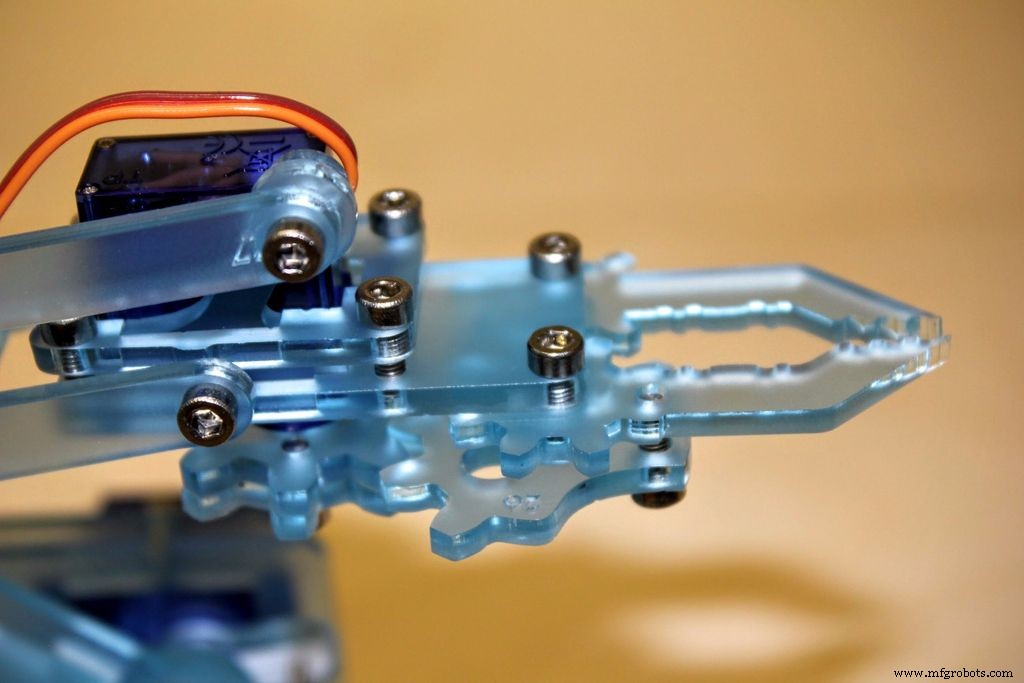
Stap 11:Bouw de klauw!
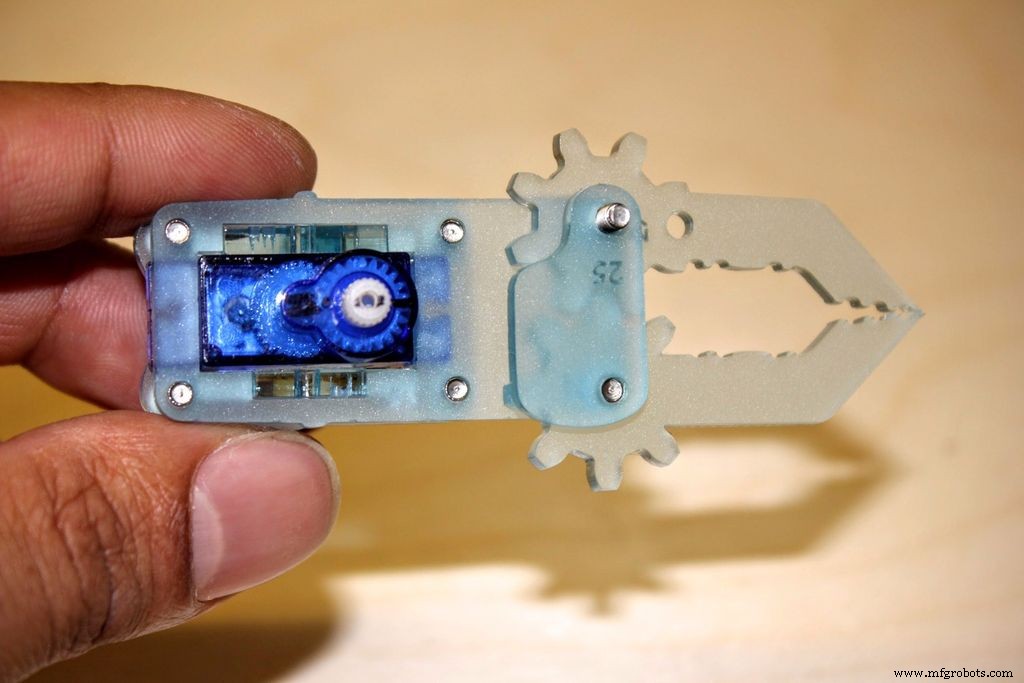
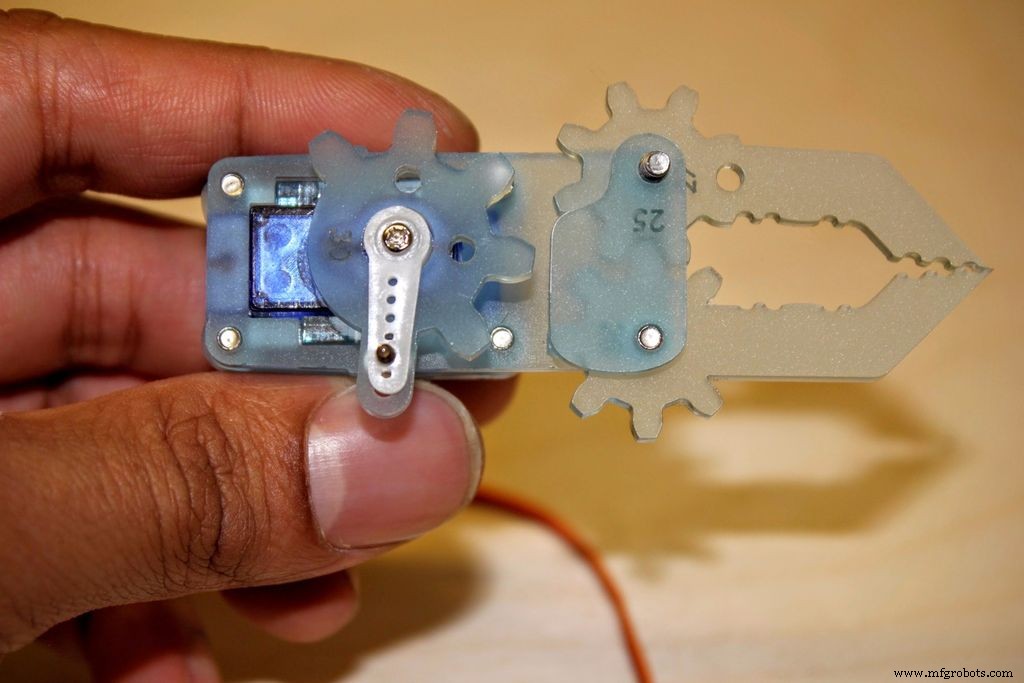
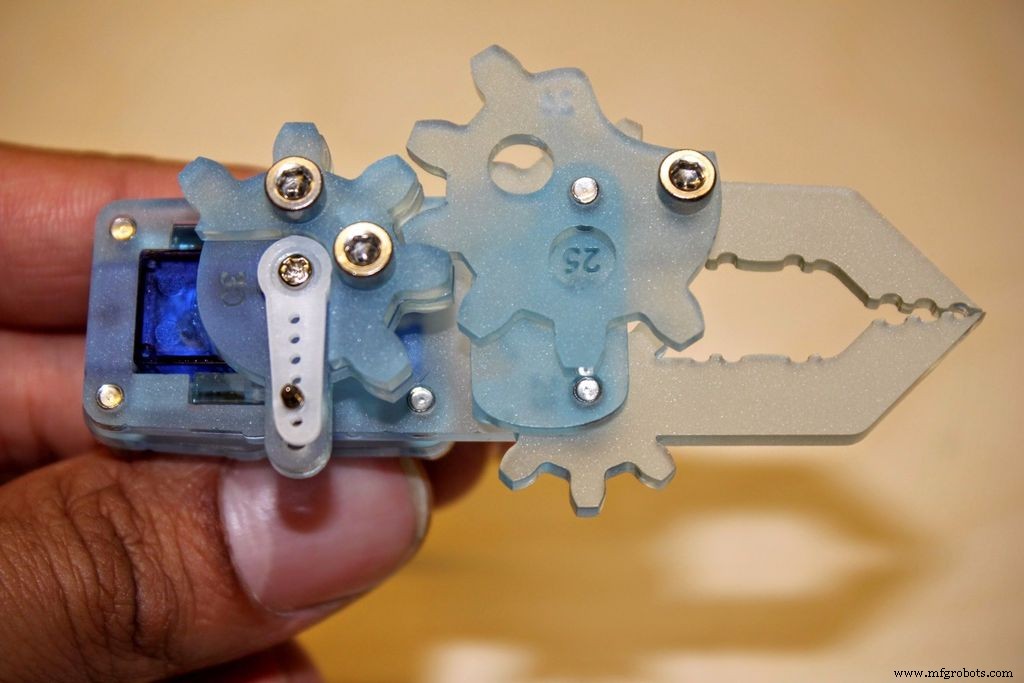
Steek de servo door de overgebleven kraag, #21. Steek onderdelen #22 en #23 in de zijsleuven die door de servo zijn gemaakt en deel #21 en zet ze vervolgens met behulp van onderdeel #24 vast met vier 8 mm moeren. Nogmaals wees voorzichtig, we zijn er bijna, je wilt niets breken.
De volgende onderdelen zullen een beetje onbeveiligd zijn totdat de laatste schroef op zijn plaats zit, dus maak je geen zorgen als je nu iets laat vallen. Zet onderdeel 28 vast door het linker gat op de kopconstructie met een 8 mm schroef in onderdeel 25. Zet vervolgens de tandwielen op onderdeel #27 in elkaar en plaats er een 12 mm schroef doorheen, de kopmontage en onderdeel #25. Dit is nog niet veilig, maar houdt het bij elkaar.
Bevestig een servohoorn aan onderdeel #30 en bevestig deze aan de servo met behulp van de machineschroef. Bevestig #29 op #30 met twee 6 mm schroeven.
Nu kunt u #26 aan de losse 12 mm schroef bevestigen en deze met een 8 mm schroef aan het extra gat in onderdeel #27 bevestigen.
Stap 12:Voeg het hoofd toe
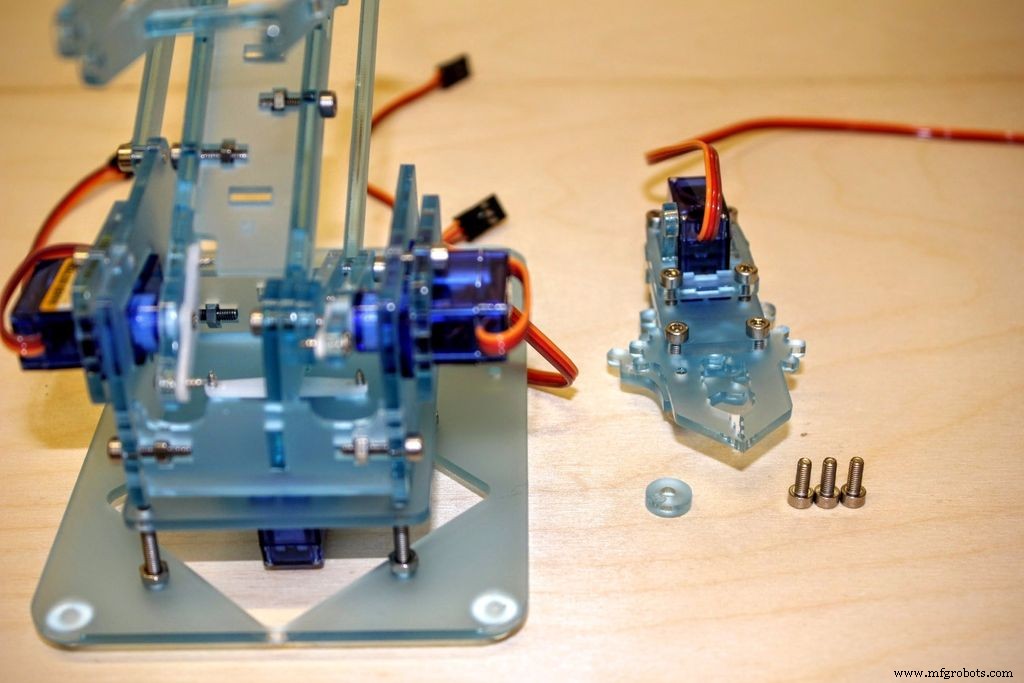
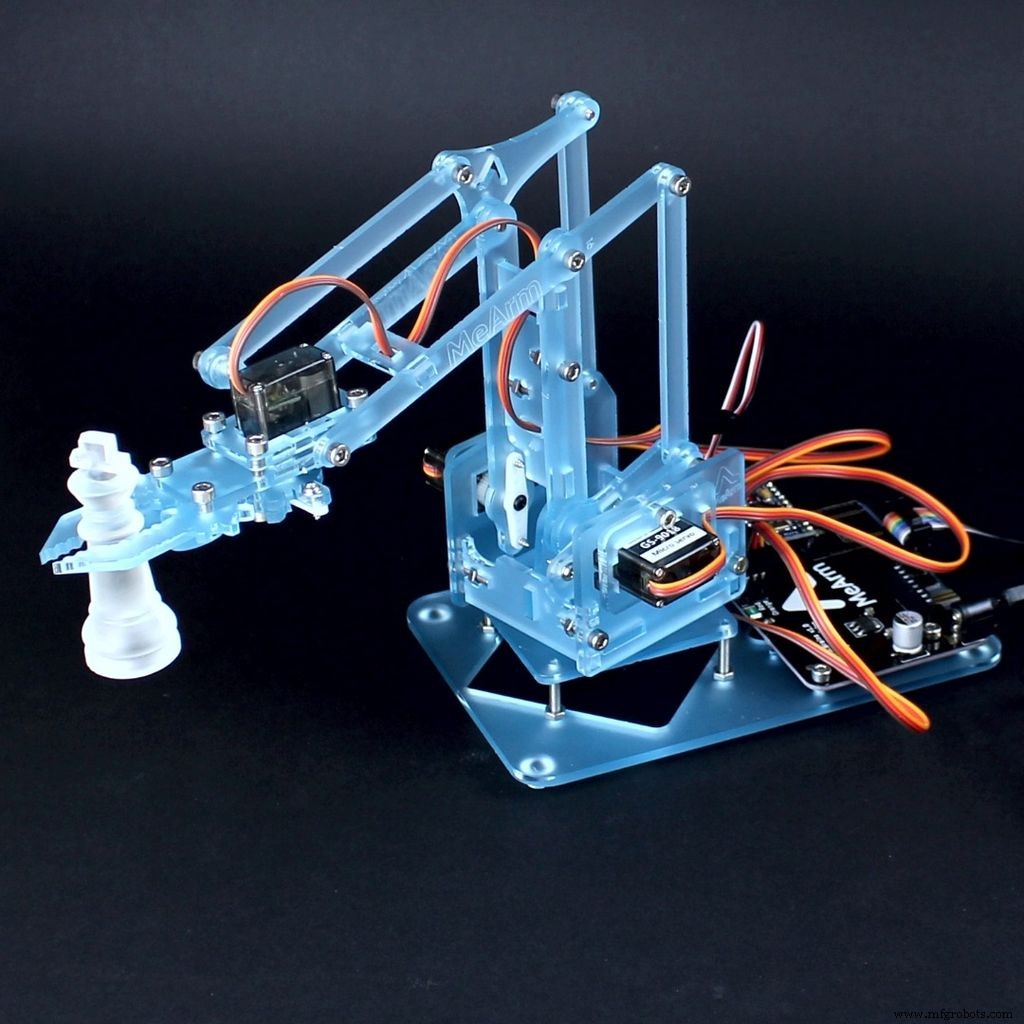
Het laatste deel is om het hoofd te bevestigen.
Dit wordt vastgezet met twee 8 mm schroeven door de onderarmen in de delen #22 en 23 op het hoofd. Het kan het gemakkelijker maken om de 8 mm schroeven op de kop van de servoklep los te draaien.
Schakel nu in en speel!
Stap 13:Problemen oplossen
Dit gedeelte zal in de loop van de tijd worden aangevuld met veelvoorkomende problemen. Als je er een hebt, laat het ons weten en we kunnen het toevoegen.
Linker servo-arm lijkt vast te zitten. Meestal is dit te wijten aan een stijve verbinding. De bevestiging van de hoofdmontage is degene die mensen vergeten.
Code
- Naamloos bestand
Naamloos bestandArduino
#includeServo midden, links, rechts, klauw; // maakt 4 "servo-objecten" void setup () { Serial.begin (9600); middelste.bijvoegen (11); // bevestigt de servo op pin 11 aan het middelste object left.attach (10); // bevestigt de servo op pin 10 aan het linker object right.attach (9); // bevestigt de servo op pin 9 aan het rechter object claw.attach (6); // bevestigt de servo op pin 6 aan het klauwobject} void loop () {middle.write (90); // stelt de servopositie in volgens de waarde (graden) left.write (90); // doet hetzelfde recht.write(90); // en opnieuw claw.write(25); // ja je raadt het al vertraging (300); // werkt de servo's niet constant bij die ze kunnen braden}
Codebender
https://codebender.cc/sketch:148456Aangepaste onderdelen en behuizingen
Productieproces
- Gantry Robot:automatiseer uw grootste applicaties
- Whitepaper:Hoe u uw robotpotentieel kunt vinden
- Het belang van robotveiligheid op uw fabrieksvloer
- Je eigen robotarm bouwen:moet je het risico nemen?
- Dual Arm SCARA-robot
- Robotarm bestuurd via Ethernet
- Littlearm 2C:bouw een 3D-geprinte Arduino-robotarm
- MK2 Plus robotarmcontroller
- Webinar:Automatiseer uw proces met Techman Robot
- Draaicentrum uitgerust met robotarm
- Robot combineert collaboratieve robotarm met mobiel platform