


Borstelloze gelijkstroommotor
Borstelloze DC-motoren zijn ontwikkeld op basis van conventionele geborstelde DC-motoren met de beschikbaarheid van halfgeleiders in vaste toestand. Dus waarom bespreken we borstelloze gelijkstroommotoren in een hoofdstuk over wisselstroommotoren?
Borstelloze DC-motoren zijn vergelijkbaar met AC-synchrone motoren. Het grote verschil is dat synchrone motoren een sinusvormige rug ontwikkelen EMF , in vergelijking met een rechthoekige of trapeziumvormige achter-EMK voor borstelloze gelijkstroommotoren.
Beide hebben door stator roterende magnetische velden gecreëerd die koppel produceren in een magnetische rotor.
Synchrone motoren hebben meestal een groot formaat van meerdere kilowatts, vaak met elektromagneetrotoren. Echte synchrone motoren worden beschouwd als single-speed, een subveelvoud van de powerline-frequentie. Borstelloze gelijkstroommotoren zijn meestal klein - een paar watt tot tientallen watts, met permanentmagneetrotoren.
De snelheid van een borstelloze gelijkstroommotor is niet vast, tenzij deze wordt aangedreven door een gefaseerde vergrendelde lus die is gekoppeld aan een referentiefrequentie. De bouwstijl is ofwel cilindrisch of pannenkoek.
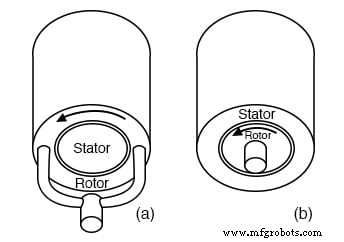
Cilindervormige constructie:(a) buitenrotor, (b) binnenrotor
De meest gebruikelijke constructie, cilindrisch, kan twee vormen aannemen (figuur hierboven). De meest voorkomende cilindrische stijl is met de rotor aan de binnenkant, rechtsboven. Dit type motor wordt gebruikt in harde schijven. Het is ook mogelijk om de rotor aan de buitenkant rondom de stator te plaatsen.
Dat is het geval met borstelloze DC-ventilatormotoren, zonder de as. Deze bouwstijl kan kort en krachtig zijn. De richting van de magnetische flux is echter radiaal ten opzichte van de rotatie-as.
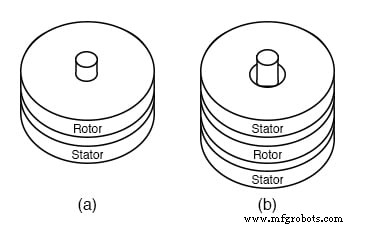
Pannenkoekmotorconstructie:(a) enkele stator, (b) dubbele stator
Pannenkoekmotoren met hoog koppel kunnen statorspoelen hebben aan beide zijden van de rotor (figuur hierboven-b).
Toepassingen met een lager koppel, zoals aandrijfmotoren voor diskettes, zijn voldoende met een statorspoel aan één kant van de rotor (Figuur hierboven-a). De richting van de magnetische flux is axiaal, dat wil zeggen evenwijdig aan de rotatie-as.
De commutatiefunctie kan worden uitgevoerd door verschillende aspositiesensoren:optische encoder, een magnetische encoder (resolver, synchro, enz.), of magnetische Hall-effectsensoren. Kleine goedkope motoren gebruiken Hall-effectsensoren.
Een Hall-effectsensor is een halfgeleiderapparaat waarbij de elektronenstroom wordt beïnvloed door een magnetisch veld dat loodrecht op de stroomrichting staat. Het ziet eruit als een vierpolig netwerk met variabele weerstanden. De spanningen op de twee uitgangen zijn complementair.
Het aanleggen van een magnetisch veld op de sensor veroorzaakt een kleine spanningsverandering aan de uitgang. De Hall-uitgang kan een comparator aansturen om te zorgen voor een stabielere aandrijving naar het voedingsapparaat. Of het kan een samengestelde transistortrap aansturen als het correct is voorgespannen.
Modernere Hall-effectsensoren kunnen een geïntegreerde versterker en digitale schakelingen bevatten. Dit apparaat met drie geleiders kan de vermogenstransistor rechtstreeks aansturen en een fasewikkeling voeden. De sensor moet dicht bij de permanentmagneetrotor worden gemonteerd om zijn positie te meten.

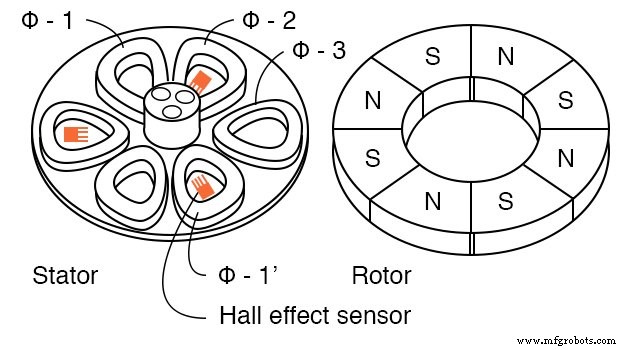
Hall-effectsensoren schakelen 3-φ borstelloze gelijkstroommotor om
De eenvoudige cilindrische 3-φ-motor (afbeelding hierboven) wordt gecommuteerd door een Hall-effectapparaat voor elk van de drie statorfasen. De veranderende positie van de permanente magneetrotor wordt gedetecteerd door het Hall-apparaat wanneer de polariteit van de passerende rotorpool verandert.
Dit Hall-signaal wordt versterkt zodat de statorspoelen met de juiste stroom worden aangestuurd. Hier niet weergegeven, kunnen de Hall-signalen worden verwerkt door combinatorische logica voor efficiëntere aandrijfgolfvormen.
De bovenstaande cilindrische motor zou een harde schijf kunnen aandrijven als deze zou zijn uitgerust met een gefaseerde vergrendelde lus (PLL) om een constante snelheid te behouden. Soortgelijke circuits kunnen de aandrijfmotor van de pancake-diskette aandrijven (afbeelding hieronder). Nogmaals, het zou een PLL nodig hebben om een constante snelheid te behouden.
Borstelloze pannenkoekmotor
De 3φ pancake motor heeft 6 statorpolen en 8 rotorpolen. De rotor is een platte ferrietring gemagnetiseerd met acht axiaal gemagnetiseerde wisselpolen. We laten niet zien dat de rotor is afgedekt met een zachtstalen plaat voor montage op het lager in het midden van de stator.
De stalen plaat helpt ook om het magnetische circuit te voltooien. De statorpolen zijn ook bovenop een stalen plaat gemonteerd, waardoor het magnetische circuit wordt gesloten.
De platte statorspoelen zijn trapeziumvormig om beter op de spoelen te passen en de rotorpolen te benaderen. De 6-statorspoelen bestaan uit drie wikkelfasen.
Als de drie statorfasen achtereenvolgens werden bekrachtigd, zou een roterend magnetisch veld worden gegenereerd.
De permanentmagneetrotor zou volgen zoals in het geval van een synchrone motor. Een tweepolige rotor zou dit veld met dezelfde rotatiesnelheid volgen als het roterende veld. Onze 8-polige rotor zal echter met een subveelvoud van deze snelheid draaien vanwege de extra polen in de rotor.
De borstelloze DC-ventilatormotor heeft de volgende kenmerken:

Borstelloze ventilatormotor, 2-φ
- De stator heeft 2-fasen verdeeld over 4-polen
- Er zijn 4 opvallende polen zonder wikkelingen om nul koppelpunten te elimineren.
- De rotor heeft vier hoofdaandrijfpolen.
- De rotor heeft 8-polige over elkaar geplaatste polen om nulkoppelpunten te elimineren.
- De Hall-effectsensoren zijn fysiek op 45o geplaatst.
- Het ventilatorhuis wordt bovenop de rotor geplaatst, die over de stator wordt geplaatst.
Het doel van een borstelloze ventilatormotor is om de fabricagekosten te minimaliseren. Dit is een stimulans om producten met een lager prestatievermogen van een 3-φ naar een 2-φ-configuratie te verplaatsen. Afhankelijk van hoe hij wordt aangedreven, kan hij een 4-φ motor worden genoemd.
U herinnert zich misschien dat conventionele gelijkstroommotoren geen even aantal ankerpolen kunnen hebben (2, 4, enz.) als ze zelfstartend moeten zijn, waarbij 3, 5, 7 gebruikelijk zijn. Het is dus mogelijk dat een hypothetische 4-polige motor tot stilstand komt bij een koppelminima, waar hij niet vanuit stilstand kan worden gestart.
De toevoeging van de vier kleine opvallende polen zonder wikkelingen legt een rimpelkoppel op de koppel vs positie-curve. Wanneer dit rimpelkoppel wordt toegevoegd aan de normale bekrachtigde koppelcurve, is het resultaat dat de koppelminima gedeeltelijk worden verwijderd.
Dit maakt het mogelijk om de motor te starten voor alle mogelijke stopposities. De toevoeging van acht permanente magneetpolen aan de normale 4-polige permanente magneetrotor legt een klein tweede harmonisch rimpelkoppel op het normale 4-polige rimpelkoppel.
Dit verwijdert de koppelminima verder. Zolang de koppelminima niet tot nul dalen, zouden we de motor moeten kunnen starten. Hoe succesvoller we zijn in het verwijderen van de koppelminima, hoe gemakkelijker de motor start.
De 2-φ stator vereist dat de Hall-sensoren 90° . uit elkaar staan elektrisch. Als de rotor een 2-polige rotor was, zouden de Hall-sensoren 90° . zijn geplaatst fysiek. Aangezien we een 4-polige permanente magneetrotor hebben, moeten de sensoren 45° . worden geplaatst fysiek om de 90° . te bereiken elektrische afstand. (Let op de ruimte tussen de ruimtes hierboven.)
Het grootste deel van het koppel is te danken aan de interactie van de binnenste 2-φ-spoelen van de stator met het 4-polige gedeelte van de rotor. Bovendien moet het 4-polige gedeelte van de rotor zich aan de onderkant bevinden, zodat de Hall-sensoren de juiste commutatiesignalen detecteren.
Het 8-polige rotorgedeelte is alleen bedoeld om het starten van de motor te verbeteren.

Borstelloze DC-motor 2-φ push-pull-aandrijving
In de bovenstaande afbeelding gebruikt de 2-φ push-pull-aandrijving (ook bekend als 4-φ-drive) twee Hall-effectsensoren om vier wikkelingen aan te drijven. De sensoren hebben een onderlinge afstand van 90° elektrisch uit elkaar, wat 90° . is fysiek voor een enkelpolige rotor.
Omdat de Hall-sensor twee complementaire uitgangen heeft, zorgt één sensor voor commutatie voor twee tegenover elkaar liggende wikkelingen.
Industriële technologie
- Eenfasige inductiemotoren
- AC-commutatormotoren
- Nanotec:compacte motorcontroller voor borstelloze gelijkstroommotoren en stappenmotoren
- Problemen met wondrotormotoren oplossen
- Tip van elektromotoren:minimaliseer je starts
- Technische tip:motoren
- Elektromotorveiligheid:verschillende fasen en veiligheidsmaatregelen
- 4 belangrijke soorten wikkelfouten in AC-elektromotoren
- Over industriële motoren en toepassingen
- BLDC Motors &Automatisering
- Een inleiding tot de BLDC-motor