


Tesla polyphase inductiemotoren
De meeste AC-motoren zijn inductiemotoren. Inductiemotoren hebben de voorkeur vanwege hun robuustheid en eenvoud. In feite zijn 90% van de industriële motoren inductiemotoren.
Nikola Tesla bedacht de basisprincipes van de meerfasige inductiemotor in 1883 en had in 1888 een model van half pk (400 watt). Tesla verkocht de productierechten aan George Westinghouse voor $ 65.000.
De meeste grote (> 1 pk of 1 kW) industriële motoren zijn meerfase inductiemotoren . Met polyphase bedoelen we dat de stator meerdere afzonderlijke wikkelingen per motorpool bevat, aangedreven door overeenkomstige in de tijd verschoven sinusgolven.
In de praktijk gaat het om twee of drie fasen. Grote industriële motoren zijn 3-fasen. Hoewel we voor de eenvoud talloze illustraties van tweefasige motoren opnemen, moeten we benadrukken dat bijna alle meerfasige motoren driefasig zijn.
Door inductiemotor , bedoelen we dat de statorwikkelingen een stroom in de rotorgeleiders induceren, zoals een transformator, in tegenstelling tot een geborstelde DC-commutatormotor.
Constructie AC-inductiemotor
Een inductiemotor bestaat uit een rotor, ook wel een anker genoemd, en een stator met wikkelingen die zijn aangesloten op een meerfasige energiebron, zoals weergegeven in de onderstaande afbeelding. De eenvoudige 2-fasen inductiemotor hieronder is vergelijkbaar met de 1/2 pk-motor die Nikola Tesla in 1888 introduceerde.
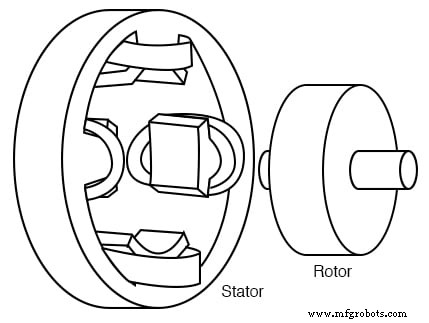
Tesla meerfasige inductiemotor
De stator in de bovenstaande afbeelding is gewikkeld met paren spoelen die overeenkomen met de fasen van beschikbare elektrische energie. De tweefasige inductiemotorstator hierboven heeft 2 paar spoelen, één paar voor elk van de twee fasen van AC.
De afzonderlijke spoelen van een paar zijn in serie geschakeld en komen overeen met de tegenovergestelde polen van een elektromagneet. Dat wil zeggen, één spoel komt overeen met een N-pool, de andere met een S-pool totdat de fase van AC van polariteit verandert. Het andere paar spoelen is 90° in de ruimte gericht op het eerste paar.
Dit spoelenpaar is bij een 2-fasenmotor met 90° in de tijd verschoven AC aangesloten. In de tijd van Tesla was de bron van de twee fasen van wisselstroom een 2-fasen dynamo.
De stator in de bovenstaande afbeelding heeft salient , duidelijk uitstekende palen, zoals gebruikt op de vroege inductiemotor van Tesla. Dit ontwerp wordt tot op de dag van vandaag gebruikt voor subfractionele pk-motoren (<50 watt). Voor grotere motoren resulteert echter minder koppelpulsatie en hogere efficiëntie als de spoelen zijn ingebed in sleuven die in de statorlaminaten zijn gesneden (afbeelding hieronder).
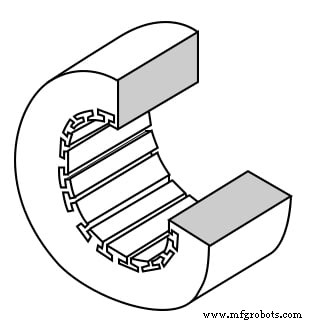
Statorframe met sleuven voor wikkelingen
De statorlamineringen zijn dunne geïsoleerde ringen met sleuven geponst uit platen van elektrisch staal. Een stapel hiervan wordt vastgezet met eindschroeven, die ook de eindbehuizingen kunnen vasthouden.
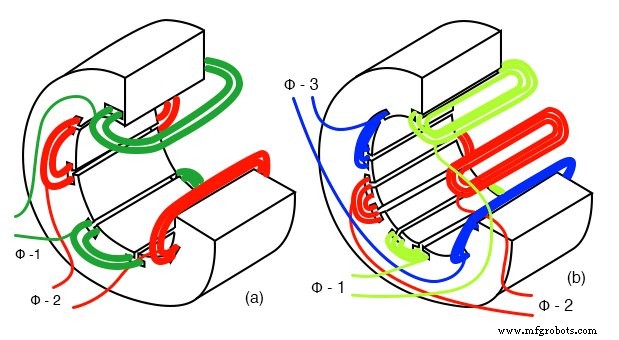
Stator met (a) 2-φ en (b) 3-φ wikkelingen
In de bovenstaande afbeelding zijn de wikkelingen voor zowel een tweefasige motor als een driefasige motor in de statorgroeven geïnstalleerd. De spoelen worden op een externe bevestiging gewikkeld en vervolgens in de sleuven verwerkt. Isolatie ingeklemd tussen de omtrek van de spoel en de sleuf beschermt tegen slijtage.
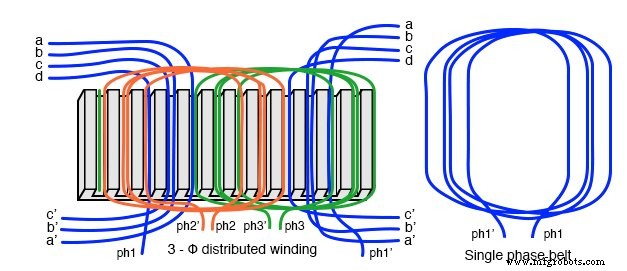
De werkelijke statorwikkelingen zijn complexer dan de enkele wikkelingen per pool in de bovenstaande afbeelding. Als we de 2-φ-motor vergelijken met de 2-φ-motor van Tesla met opvallende polen, is het aantal spoelen hetzelfde. In echte grote motoren is een poolwikkeling verdeeld in identieke spoelen die in veel kleinere sleuven zijn gestoken dan hierboven.
Deze groep wordt een faseband genoemd (zie onderstaande figuur). De verdeelde spoelen van de faseriem heffen enkele van de oneven harmonischen op, waardoor een meer sinusvormige magnetische veldverdeling over de pool ontstaat. Dit wordt getoond in het gedeelte synchrone motor.
De sleuven aan de rand van de paal hebben mogelijk minder windingen dan de andere sleuven. Randsleuven kunnen wikkelingen van twee fasen bevatten. Dat wil zeggen dat de fasebanden elkaar overlappen.
De sleutel tot de populariteit van de AC-inductiemotor is zijn eenvoud, zoals blijkt uit de eenvoudige rotor (figuur hieronder). De rotor bestaat uit een as, een stalen gelamineerde rotor en een ingebedde koperen of aluminium eekhoornkooi , getoond bij (b) verwijderd van de rotor.
In vergelijking met een DC-motoranker is er geen commutator. Dit elimineert de borstels, vonken, vonken, grafietstof, borstelafstelling en vervanging, en opnieuw machinaal bewerken van de commutator.
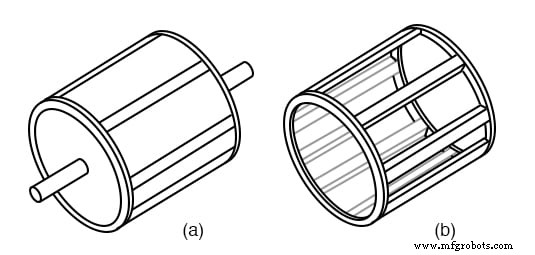
Gelamineerde rotor met (a) ingebouwde eekhoornkooi, (b) geleidende kooi verwijderd van de rotor
De eekhoornkooigeleiders kunnen scheef of gedraaid zijn ten opzichte van de as. De verkeerde uitlijning met de statorsleuven vermindert koppelpulsaties.
Zowel rotor- als statorkernen zijn samengesteld uit een stapel geïsoleerde lamellen. De lamellen zijn gecoat met isolerend oxide of vernis om wervelstroomverliezen te minimaliseren. De legering die in de lamineringen wordt gebruikt, is geselecteerd op lage hystereseverliezen.
Theorie van de werking van inductiemotoren
Een korte uitleg van de werking is dat de stator een roterend magnetisch veld creëert dat de rotor rondsleept.
De werkingstheorie van inductiemotoren is gebaseerd op een roterend magnetisch veld. Een manier om een roterend magnetisch veld te creëren, is door een permanente magneet te draaien. Als de bewegende magnetische fluxlijnen een geleidende schijf snijden, zal deze de beweging van de magneet volgen.
De fluxlijnen die de geleider doorsnijden, zullen een spanning induceren, en bijgevolg stroom, in de geleidende schijf. Deze stroom creëert een elektromagneet waarvan de polariteit de beweging van de permanente magneet tegenwerkt - Wet van Lenz .
De polariteit van de elektromagneet is zodanig dat deze tegen de permanente magneet trekt. De schijf volgt met iets minder snelheid dan de permanente magneet.
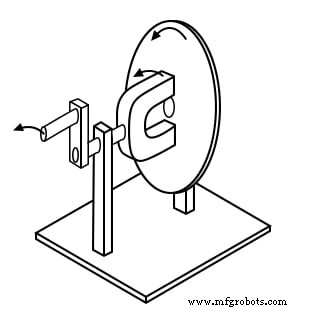
Roterend magnetisch veld produceert koppel in geleidende schijf
Het door de schijf ontwikkelde koppel is evenredig met het aantal fluxlijnen die de schijf doorsnijden en de snelheid waarmee deze de schijf doorsnijdt. Als de schijf met dezelfde snelheid zou draaien als de permanente magneet, zou er geen flux zijn die de schijf snijdt, geen geïnduceerde stroom, geen elektromagneetveld, geen koppel.
De schijfsnelheid zal dus altijd achterblijven bij die van de roterende permanente magneet, zodat fluxlijnen die de schijf snijden een stroom induceren en een elektromagnetisch veld in de schijf creëren, dat de permanente magneet volgt.
Als er een belasting op de schijf wordt uitgeoefend, waardoor deze wordt vertraagd, zal er meer koppel worden ontwikkeld naarmate meer fluxlijnen de schijf doorsnijden. Koppel is evenredig met slip , de mate waarin de schijf achter de roterende magneet valt. Meer slip komt overeen met meer flux die de geleidende schijf snijdt, waardoor meer koppel wordt ontwikkeld.
Een analoge auto-wervelstroomsnelheidsmeter is gebaseerd op het hierboven geïllustreerde principe. Met de schijf tegengehouden door een veer, is de afbuiging van de schijf en de naald evenredig met de rotatiesnelheid van de magneet.
Een roterend magnetisch veld wordt gecreëerd door twee spoelen die haaks op elkaar staan, aangedreven door stromen die 90° uit fase zijn. Dit zou niet verwonderlijk moeten zijn als u bekend bent met oscilloscoop Lissajous-patronen.
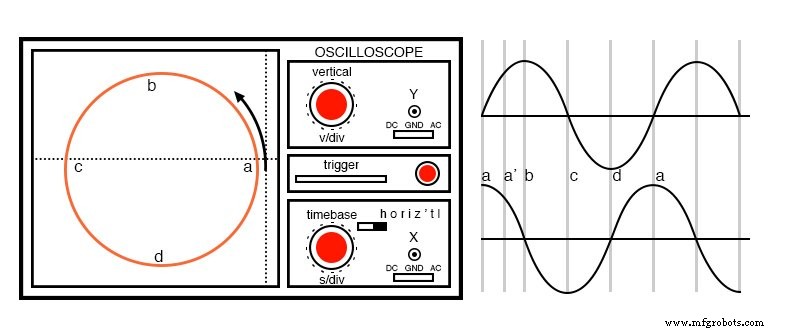
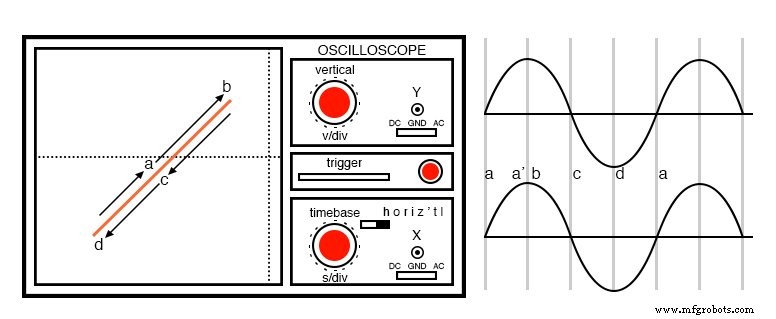
Uit fase (90°) produceren sinusgolven een cirkelvormig Lissajous-patroon
In de bovenstaande afbeelding wordt een cirkelvormige Lissajous geproduceerd door de horizontale en verticale oscilloscoop-ingangen aan te sturen met sinusgolven uit fase 90°. Beginnend bij (a) met maximale "X" en minimale "Y" afbuiging, beweegt het spoor omhoog en naar links in de richting van (b).
Tussen (a) en (b) zijn de twee golfvormen gelijk aan 0,707 Vpk bij 45°. Dit punt (0.707, 0.707) valt op de straal van de cirkel tussen (a) en (b) Het spoor beweegt naar (b) met minimale "X" en maximale "Y" afbuiging. Met maximale negatieve "X" en minimale "Y" afbuiging, gaat het spoor naar (c).
Dan met minimale "X" en maximale negatieve "Y", gaat het naar (d) en weer terug naar (a), waarmee een cyclus wordt voltooid.
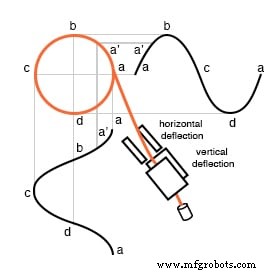
X-as sinus en Y-as cosinus traceringscirkel
De figuur toont de twee 90° in fase verschoven sinusgolven die worden toegepast op oscilloscoop-afbuigplaten die loodrecht in de ruimte staan. De combinatie van 90° gefaseerde sinusgolven en rechte hoekafbuiging resulteert in een tweedimensionaal patroon - een cirkel. Deze cirkel wordt gevolgd door een tegen de klok in draaiende elektronenstraal.
Ter referentie:de onderstaande afbeelding laat zien waarom in-fase sinusgolven geen cirkelvormig patroon produceren. Gelijke "X" en "Y" afbuiging verplaatst de verlichte plek van de oorsprong bij (a) omhoog naar rechts (1,1) bij (b), terug naar links naar oorsprong bij (c), naar links naar (-1 .-1) bij (d), en terug rechtop naar de oorsprong. De lijn wordt geproduceerd door gelijke afbuigingen langs beide assen; y=x is een rechte lijn.
Geen cirkelvormige beweging van in-fase golfvormen
Als een paar sinusgolven van 90° uit fase een cirkelvormige Lissajous produceert, zou een vergelijkbaar paar stromen in staat moeten zijn om een cirkelvormig roterend magnetisch veld te produceren. Dat is het geval bij een 2-fasen motor. Naar analogie zullen drie windingen die 120 ° uit elkaar in de ruimte zijn geplaatst en gevoed met overeenkomstige 120 ° gefaseerde stromen, ook een roterend magnetisch veld produceren.
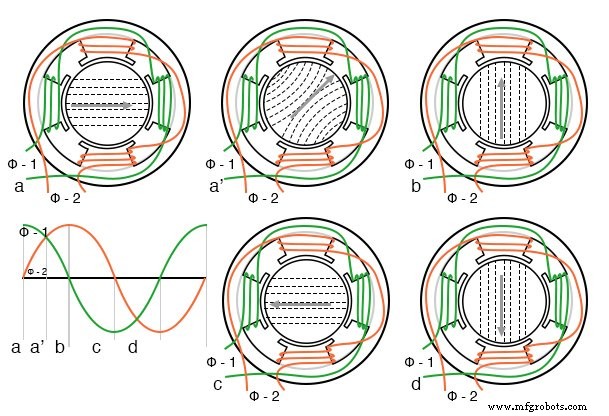
Roterend magnetisch veld van 90° gefaseerde sinusgolven
Terwijl de 90° gefaseerde sinusgolven, de bovenstaande figuur, voortschrijden van de punten (a) tot (d), draait het magnetische veld als volgt tegen de klok in (figuren a-d):
- (a) φ-1 maximum, φ-2 nul
- (a') φ-1 70%, φ-2 70%
- (b) φ-1 nul, φ-2 maximum
- (c) φ-1 maximum negatief, φ-2 nul
- (d) φ-1 nul, φ-2 maximum negatief
Volledige motorsnelheid en synchrone motorsnelheid
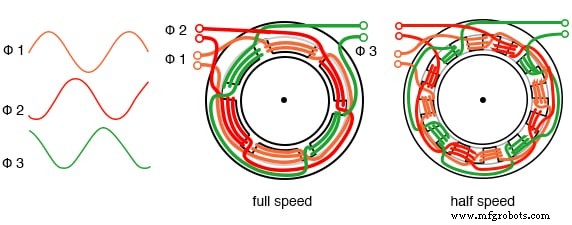
De rotatiesnelheid van een roterend magnetisch veld van een stator is gerelateerd aan het aantal poolparen per statorfase. De onderstaande figuur "volle snelheid" heeft in totaal zes polen of drie poolparen en drie fasen. Er is echter maar één poolpaar per fase.
Het magnetische veld zal eenmaal per sinusgolfcyclus roteren. Bij 60 Hz vermogen draait het veld 60 keer per seconde of 3600 omwentelingen per minuut (rpm). Voor 50 Hz vermogen draait hij met 50 omwentelingen per seconde of 3000 tpm. De 3600 en 3000 rpm, zijn de synchrone snelheid van de motor.
Hoewel de rotor van een inductiemotor deze snelheid nooit haalt, is het zeker een bovengrens. Als we het aantal motorpolen verdubbelen, wordt de synchrone snelheid gehalveerd omdat het magnetische veld 180° in de ruimte roteert voor 360° van de elektrische sinusgolf.
Verdubbeling van de statorpolen halveert de synchrone snelheid
De synchrone snelheid wordt gegeven door:
Ns =120·f/P Ns =synchrone snelheid in rpm f =frequentie van toegepast vermogen, Hz P =totaal aantal polen per fase, een veelvoud van 2
Voorbeeld: De bovenstaande figuur "halve snelheid" heeft vier polen per fase (3-fasen). Het synchrone toerental voor 50 Hz vermogen is:S =120·50/4 =1500 rpm
De korte uitleg van de inductiemotor is dat het roterende magnetische veld dat door de stator wordt geproduceerd, de rotor meesleept.
De langere, meer correcte verklaring is dat het magnetische veld van de stator een wisselstroom induceert in de eekhoornkooigeleiders van de rotor, die een secundaire transformator vormen. Deze geïnduceerde rotorstroom creëert op zijn beurt een magnetisch veld.
Het roterende magnetische veld van de stator werkt samen met dit rotorveld. Het rotorveld probeert uit te lijnen met het roterende statorveld. Het resultaat is de rotatie van de rotor van de eekhoornkooi. Als er geen mechanische motorkoppelbelasting, geen lager, windkracht of andere verliezen waren, zou de rotor met de synchrone snelheid draaien.
Echter, de slip tussen de rotor en het synchrone snelheidsstatorveld ontwikkelt koppel. Het is de magnetische flux die de rotorgeleiders snijdt terwijl deze slipt, waardoor koppel ontstaat. Een belaste motor zal dus slippen in verhouding tot de mechanische belasting.
Als de rotor met synchrone snelheid zou draaien, zou er geen statorflux zijn die de rotor snijdt, geen stroom geïnduceerd in de rotor, geen koppel.
Koppel in inductiemotoren
Wanneer de motor voor het eerst van stroom wordt voorzien, is de rotor in rust, terwijl het magnetische veld van de stator roteert met de synchrone snelheid Ns . Het statorveld snijdt de rotor af met de synchrone snelheid Ns . De stroom die wordt geïnduceerd in de kortgesloten windingen van de rotor is maximaal, evenals de frequentie van de stroom, de lijnfrequentie.
Naarmate de rotor versnelt, is de snelheid waarmee de statorflux de rotor snijdt het verschil tussen de synchrone snelheid Ns en werkelijke rotorsnelheid N, of (Ns - N). De verhouding tussen de werkelijke flux die de rotor snijdt en de synchrone snelheid wordt gedefinieerd als slip :
s =(Ns - N)/Ns waar:Ns =synchrone snelheid, N =rotorsnelheid
De frequentie van de stroom die in de rotorgeleiders wordt geïnduceerd, is slechts zo hoog als de lijnfrequentie bij het starten van de motor, en neemt af naarmate de rotor de synchrone snelheid nadert. Rotorfrequentie wordt gegeven door:
fr =s·f waarbij:s =slip, f =frequentie statorvoedingslijn
Slip bij 100% koppel is typisch 5% of minder in inductiemotoren. Dus voor f =50 Hz lijnfrequentie, de frequentie van de geïnduceerde stroom in de rotor fr =0,05.50 =2,5 Hz. Waarom is het zo laag? Het magnetische veld van de stator roteert met 50 Hz. De rotorsnelheid is 5% minder.
Het roterende magnetische veld snijdt de rotor alleen af bij 2,5 Hz. De 2,5 Hz is het verschil tussen de synchrone snelheid en de werkelijke rotorsnelheid. Als de rotor een beetje sneller draait, met de synchrone snelheid, zal er helemaal geen flux de rotor snijden, fr =0.
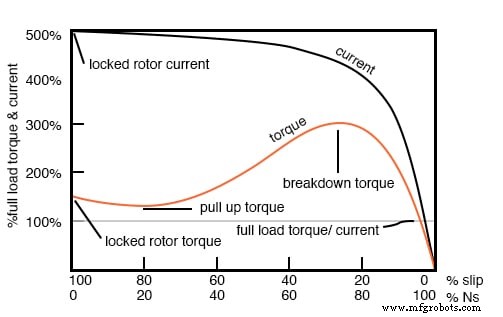
Koppel en snelheid versus %slip. %Ns =%Synchrone snelheid
De bovenstaande grafiek laat zien dat het startkoppel bekend staat als vergrendeld rotorkoppel (LRT) is hoger dan 100% van het koppel bij volledige belasting (FLT), de veilige continue koppelwaarde. Het koppel van de vergrendelde rotor is ongeveer 175% van de FLT voor de hierboven weergegeven voorbeeldmotor.
Startstroom bekend als vergrendelde rotorstroom (LRC) is 500% van vollaststroom (FLC), de veilige bedrijfsstroom. De stroom is hoog omdat dit analoog is aan een kortgesloten secundair op een transformator. Als de rotor begint te draaien, kan het koppel voor bepaalde motorklassen een beetje afnemen tot een waarde die bekend staat als het optrekkoppel .
Dit is de laagste koppelwaarde die de startmotor ooit is tegengekomen. Naarmate de rotor 80% van het synchrone toerental wint, neemt het koppel toe van 175% tot 300% van het koppel bij volledige belasting. Dit doorslagkoppel is te wijten aan de groter dan normale 20% slip.
De stroom is op dit punt slechts licht afgenomen, maar zal daarna snel afnemen. Naarmate de rotor versnelt tot binnen enkele procenten van de synchrone snelheid, zullen zowel het koppel als de stroom aanzienlijk afnemen. Slip zal slechts een paar procent zijn tijdens normaal gebruik.
Voor een draaiende motor is elk deel van de koppelcurve onder 100% nominaal koppel normaal. De motorbelasting bepaalt het werkpunt op de koppelcurve. Hoewel het motorkoppel en de stroom tijdens het starten gedurende enkele seconden 100% kunnen overschrijden, kan continu bedrijf boven 100% de motor beschadigen.
Elke motorkoppelbelasting boven het doorslagkoppel zal de motor afslaan. Het koppel, de slip en de stroom zullen nul naderen voor een belastingstoestand "geen mechanisch koppel". Deze toestand is analoog aan een open secundaire transformator.
Er zijn verschillende basisontwerpen van inductiemotoren die een aanzienlijke variatie vertonen ten opzichte van de bovenstaande koppelcurve. De verschillende ontwerpen zijn geoptimaliseerd voor het starten en uitvoeren van verschillende soorten lasten. Het vergrendelde rotorkoppel (LRT) voor verschillende motorontwerpen en -groottes varieert van 60% tot 350% van het koppel bij volledige belasting (FLT).
Startstroom of geblokkeerde rotorstroom (LRC) kan variëren van 500% tot 1400% van de vollaststroom (FLC). Dit stroomverbruik kan een startprobleem vormen voor grote inductiemotoren.
NEMA- en IEC-motorklassen
Er zijn verschillende standaardklassen (of ontwerpen) voor motoren ontwikkeld, die overeenkomen met de koppelkrommen (figuur hieronder) om verschillende soorten belastingen beter aan te drijven. De National Electrical Manufacturers Association (NEMA) heeft motorklassen A, B, C en D gespecificeerd om aan deze aandrijvingsvereisten te voldoen.
Vergelijkbare klassen N en H van de International Electrotechnical Commission (IEC) komen overeen met respectievelijk NEMA B- en C-ontwerpen.
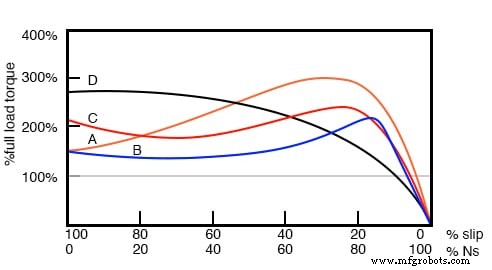
Kenmerken voor NEMA-ontwerpen
Alle motoren, behalve klasse D, werken met 5% slip of minder bij volledige belasting.
- Klasse B (IEC-klasse N) motoren zijn de standaardmotoren die in de meeste toepassingen worden gebruikt. Met een startkoppel van LRT =150% tot 170% van FLT kan hij de meeste belastingen starten, zonder overmatige startstroom (LRT). Het rendement en de arbeidsfactor zijn hoog. Het drijft doorgaans pompen, ventilatoren en werktuigmachines aan.
- Klasse A startkoppel is hetzelfde als klasse B. Uitvalkoppel en startstroom (LRT) is hoger. Deze motor verwerkt tijdelijke overbelastingen zoals die voorkomen bij spuitgietmachines.
- Klasse C (IEC-klasse H) heeft een hoger startkoppel dan klasse A en B bij LRT =200% van FLT. Deze motor wordt toegepast op moeilijk startende belastingen die met constante snelheid moeten worden aangedreven, zoals transportbanden, brekers en zuigerpompen en compressoren.
- Klasse D motoren hebben het hoogste startkoppel (LRT) in combinatie met een lage startstroom vanwege hoge slip (5% tot 13% bij FLT). De hoge slip resulteert in een lagere snelheid. De snelheidsregeling is slecht. De motor blinkt echter uit in het aandrijven van zeer variabele snelheidsbelastingen, zoals die waarvoor een vliegwiel voor energieopslag nodig is. Toepassingen zijn onder meer ponsmachines, scharen en liften.
- Klasse E motoren zijn een versie met een hoger rendement van klasse B.
- Klasse F motoren hebben een veel lager LRC, LRT en doorslagkoppel dan klasse B. Ze drijven constante, gemakkelijk gestarte belastingen aan.
Vermogensfactor in inductiemotoren
Inductiemotoren presenteren een achterblijvende (inductieve) arbeidsfactor aan de voedingslijn. De arbeidsfactor in grote volledig belaste hogesnelheidsmotoren kan zo gunstig zijn als 90% voor grote hogesnelheidsmotoren. Bij 3/4 vollast kan de grootste vermogensfactor van de hogesnelheidsmotor 92% zijn.
De arbeidsfactor voor kleine motoren met een laag toerental kan zo laag zijn als 50%. Bij het starten kan de vermogensfactor in het bereik van 10% tot 25% liggen, en stijgt naarmate de rotor snelheid bereikt.
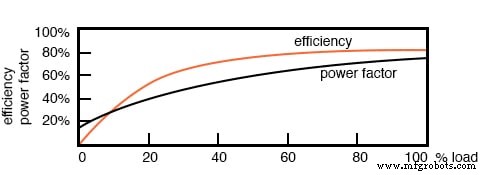
De arbeidsfactor (PF) varieert aanzienlijk met de mechanische belasting van de motor (figuur hieronder). Een onbelaste motor is analoog aan een transformator zonder ohmse belasting op de secundaire. Er wordt weinig weerstand gereflecteerd van de secundaire (rotor) naar de primaire (stator).
Dus de voedingslijn ziet een reactieve belasting, zo laag als 10% PF. Als de rotor wordt belast, wordt een toenemende resistieve component gereflecteerd van de rotor naar de stator, waardoor de arbeidsfactor toeneemt.
Inductiemotorvermogensfactor en efficiëntie
Efficiëntie in inductiemotoren
Grote driefasige motoren zijn efficiënter dan kleinere driefasige motoren, en bijna alle eenfasige motoren. Het rendement van een grote inductiemotor kan oplopen tot 95% bij volledige belasting, hoewel 90% vaker voorkomt.
Het rendement voor een licht belaste of onbelaste inductiemotor is slecht omdat het grootste deel van de stroom betrokken is bij het handhaven van de magnetiserende flux. Naarmate de koppelbelasting toeneemt, wordt meer stroom verbruikt bij het genereren van koppel, terwijl de stroom die gepaard gaat met magnetiseren vast blijft. Het rendement bij 75% FLT kan iets hoger zijn dan dat bij 100% FLT.
De efficiëntie is een paar procent lager bij 50% FLT en nog een paar procent lager bij 25% FLT. De efficiëntie wordt pas slecht onder de 25% FLT. De variatie van efficiëntie met laden wordt weergegeven in de bovenstaande afbeelding.
Inductiemotoren zijn doorgaans te groot om te garanderen dat hun mechanische belasting onder alle bedrijfsomstandigheden kan worden gestart en aangedreven. Als een meerfasenmotor wordt belast met minder dan 75% van het nominale koppel, waar het rendement piekt, daalt het rendement slechts licht tot 25% FLT.
Nola Power Factor Corrector
Frank Nola van NASA stelde eind jaren zeventig een power factor corrector (PFC) voor als een energiebesparend apparaat voor enkelfasige inductiemotoren. Het is gebaseerd op het uitgangspunt dat een minder dan volledig belaste inductiemotor minder efficiënt is en een lagere arbeidsfactor heeft dan een volledig belaste motor. Zo valt er energie te besparen bij gedeeltelijk belaste motoren, met name 1-φ motoren.
De energie die wordt verbruikt bij het handhaven van het magnetische veld van de stator is relatief vast met betrekking tot veranderingen in de belasting. Hoewel er niets te besparen valt op een volledig belaste motor, kan de spanning naar een gedeeltelijk belaste motor worden verlaagd om de energie te verminderen die nodig is om het magnetische veld in stand te houden.
Dit zal de arbeidsfactor en efficiëntie verhogen. Dit was een goed concept voor de notoir inefficiënte enkelfasige motoren waarvoor het bedoeld was.
Dit concept is niet erg toepasbaar op grote driefasenmotoren. Door hun hoge rendement (90%+) valt er niet veel energie te besparen. Bovendien is een 95% efficiënte motor nog steeds 94% efficiënt bij 50% koppel bij volledige belasting (FLT) en 90% efficiënt bij 25% FLT.
The potential energy savings in going from 100% FLT to 25% FLT is the difference in efficiency 95% - 90% =5%. This is not 5% of the full load wattage but 5% of the wattage at the reduced load. The Nola power factor corrector might be applicable to a 3-phase motor which idles most of the time (below 25% FLT), like a punch press.
The payback period for the expensive electronic controller has been estimated to be unattractive for most applications. Though, it might be economical as part of an electronic motor starter or speed Control.
Induction Motors as Alternators
An induction motor may function as an alternator if it is driven by a torque at greater than 100% of the synchronous speed (figure below). This corresponds to a few % of “negative” slip, say -1% slip.
This means that as we are rotating the motor faster than the synchronous speed, the rotor is advancing 1% faster than the stator rotating magnetic field. It normally lags by 1% in a motor. Since the rotor is cutting the stator magnetic field in the opposite direction (leading), the rotor induces a voltage into the stator feeding electrical energy back into the power line.
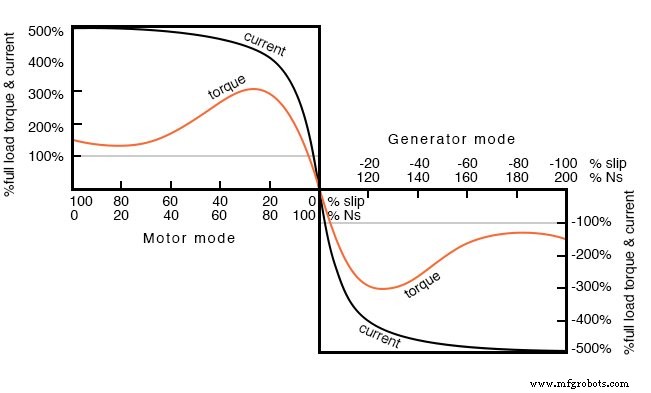
Negative torque makes induction motor into a generator
Such an induction generator must be excited by a “live” source of 50 or 60 Hz power. No power can be generated in the event of a power company power failure. This type of alternator appears to be unsuited as a standby power source.
As an auxiliary power wind turbine generator, it has the advantage of not requiring an automatic power failure disconnect switch to protect repair crews.
It is fail-safe.
Small remote (from the power grid) installations may be made self-exciting by placing capacitors in parallel with the stator phases. If the load is removed residual magnetism may generate a small amount of current flow.
This current is allowed to flow by the capacitors without dissipating power. As the generator is brought up to full speed, the current flow increases to supply a magnetizing current to the stator. The load may be applied at this point. Voltage regulation is poor. An induction motor may be converted to a self-excited generator by the addition of capacitors.
Startup procedure is to bring the wind turbine up to speed in motor mode by application of normal power line voltage to the stator. Any wind-induced turbine speed in excess of synchronous speed will develop negative torque, feeding power back into the power line, reversing the normal direction of the electric kilowatt-hour meter.
Whereas an induction motor presents a lagging power factor to the power line, an induction alternator presents a leading power factor. Induction generators are not widely used in conventional power plants.
The speed of the steam turbine drive is steady and controllable as required by synchronous alternators. Synchronous alternators are also more efficient.
The speed of a wind turbine is difficult to control and subject to wind speed variation by gusts. An induction alternator is better able to cope with these variations due to the inherent slip. This stresses the gear train and mechanical components less than a synchronous generator.
However, this allowable speed variation only amounts to about 1%. Thus, a direct line connected induction generator is considered to be fixed-speed in a wind turbine (See Doubly-fed induction generator for a true variable speed alternator).
Multiple generators or multiple windings on a common shaft may be switched to provide a high and low speed to accommodate variable wind conditions.
Motor Starting and Speed Control
Some induction motors can draw over 1000% of full load current during starting; though, a few hundred percents is more common. Small motors of a few kilowatts or smaller can be started by direct connection to the power line.
Starting large motors can cause line voltage sag, affecting other loads. Motor-start rated circuit breakers (analogous to slow blow fuses) should replace standard circuit breakers for starting motors of a few kilowatts. This breaker accepts high overcurrent for the duration of starting.
Autotransformer induction motor starter
Motors over 50 kW use motor starters to reduce line current from several hundred to a few hundred percents of full load current. An intermittent duty autotransformer may reduce the stator voltage for a fraction of a minute during the start interval, followed by application of full line voltage as in the figure above.
Closure of the S contacts applies reduced voltage during the start interval. The S contacts open and the R contacts close after starting. This reduces starting current to, say, 200% of full load current. Since the autotransformer is only used for the short start interval, it may be sized considerably smaller than a continuous-duty unit.
Running Three-Phase Motors on Single-Phase Provisions
Three-phase motors will run on single phase as readily as single-phase motors. The only problem for either motor is starting. Sometimes 3-phase motors are purchased for use on single-phase if three-phase provisioning is anticipated.
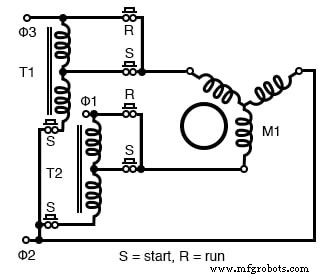
The power rating needs to be 50% larger than for a comparable single phase motor to make up for one unused winding. Single-phase is applied to a pair of windings simultaneous with a start capacitor in series with the third winding.
The start switch is opened in the figure below upon motor start. Sometimes a smaller capacitor than the start capacitor is retained while running.
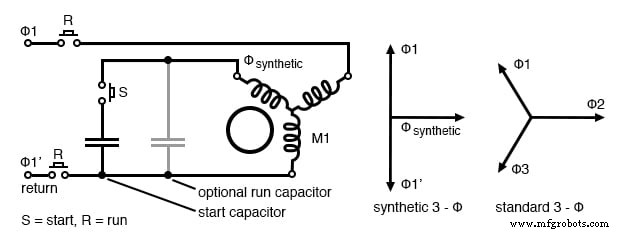
Starting a three-phase motor on single phase
The circuit in the figure above for running a three-phase motor on single phase is known as a static phase converter if the motor shaft is not loaded. Moreover, the motor acts as a 3-phase generator.
Three-phase power may be tapped off from the three stator windings for powering other 3-phase equipment. The capacitor supplies a synthetic phase approximately midway ∠90° between the ∠180° single-phase power source terminals for starting.
While running, the motor generates approximately standard 3-φ, as shown above. Matt Isserstedt shows a complete design for powering a home machine shop.
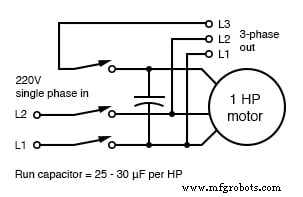
Self-starting static phase converter. Run capacitor =25-30µF per HP. Adapted from Figure 7, Hanrahan
Since a static phase converter has no torque load, it may be started with a capacitor considerably smaller than a normal start capacitor. If it is small enough, it may be left in the circuit as a run-capacitor (See the figure above).
However, smaller run-capacitors result in better 3-phase power output. Moreover, adjustment of these capacitors to equalize the currents as measured in the three phases results in the most efficient machine. However, a large start capacitor is required for about a second to quickly start the converter. Hanrahan provides construction details.
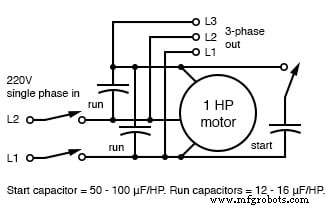
More efficient static phase converter. Start capacitor =50-100µF/HP. Run capacitors =12-16µF/HP. Adapted from Figure 1, Hanrahan
Induction Motors with Multiple Fields
Induction motors may contain multiple field windings, for example, a 4-pole and an 8-pole winding corresponding to 1800 and 900 rpm synchronous speeds. Energizing one field or the other is less complex than rewiring the stator coils.
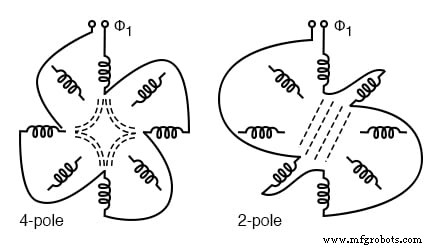
Multiple fields allow speed change
If the field is segmented with leads brought out, it may be rewired (or switched) from 4-pole to 2-pole as shown above for a 2-phase motor. The 22.5° segments are switchable to 45° segments. Only the wiring for one phase is shown above for clarity.
Thus, our induction motor may run at multiple speeds. When switching the above 60 Hz motor from 4 poles to 2 poles the synchronous speed increases from 1800 rpm to 3600 rpm.
V: If the motor is driven by 50 Hz, what would be the corresponding 4-pole and 2-pole synchronous speeds?
A:
Ns =120f/P =120*50/4 =1500 rpm (4-pole) Ns =3000 rpm (2-pole)
Induction Motors with Variable Voltage
The speed of small squirrel cage induction motors for applications such as driving fans may be changed by reducing the line voltage. This reduces the torque available to the load which reduces the speed (see figure below).
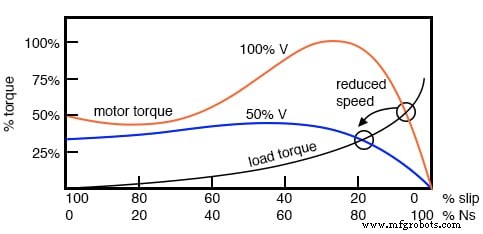
Variable voltage controls induction motor speed
Electronic Speed Control in Induction Motors
Modern solid-state electronics increase the options for speed control. By changing the 50 or 60 Hz line frequency to higher or lower values, the synchronous speed of the motor may be changed. However, decreasing the frequency of the current fed to the motor also decreases reactance XL which increases the stator current.
This may cause the stator magnetic circuit to saturate with disastrous results. In practice, the voltage to the motor needs to be decreased when the frequency is decreased.
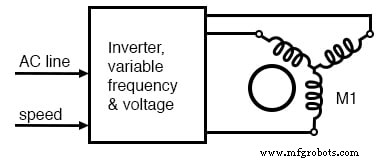
Electronic variable speed drive
Conversely, the drive frequency may be increased to increase the synchronous speed of the motor. However, the voltage needs to be increased to overcome increasing reactance to keep current up to a normal value and maintain torque.
The inverter approximates sine waves to the motor with pulse width modulation outputs. This is a chopped waveform which is either on or off, high or low, the percentage of “on” time corresponds to the instantaneous sine wave voltage.
Once electronics is applied to induction motor control, many control methods are available, varying from the simple to complex:
- Scalar Control: Low-cost method described above to control only voltage and frequency, without feedback.
- Vector Control: Also known as a vector phase control. The flux and torque producing components of stator current are measured or estimated on a real-time basis to enhance the motor torque-speed curve. This is computation intensive.
- Direct Torque Control: An elaborate adaptive motor model allows more direct control of flux and torque without feedback. This method quickly responds to load changes.
Tesla Polyphase Induction Motors Summary
- A polyphase induction motor consists of a polyphase winding embedded in a laminated stator and a conductive squirrel-cage embedded in a laminated rotor.
- Three-phase currents flowing within the stator create a rotating magnetic field which induces a current and consequent magnetic field in the rotor. Rotor torque is developed as the rotor slips a little behind the rotating stator field.
- Unlike single-phase motors, polyphase induction motors are self-starting.
- Motor starters minimize loading of the power line while providing a larger starting torque than required during running. Line current reducing starters are only required for large motors.
- Three-phase motors will run on single phase if started.
- A static phase converter is a three-phase motor running on single phase having no shaft load, generating a 3-phase output.
- Multiple field windings can be rewired for multiple discrete motor speeds by changing the number of poles.
Linear Induction Motors
The wound stator and the squirrel cage rotor of an induction motor may be cut at the circumference and unrolled into a linear induction motor. The direction of linear travel is controlled by the sequence of the drive to the stator phases.
The linear induction motor has been proposed as a drive for high-speed passenger trains. Up to this point, the linear induction motor with the accompanying magnetic repulsion levitation system required for a smooth ride has been too costly for all but experimental installations.
However, the linear induction motor is scheduled to replace steam-driven catapult aircraft launch systems on the next generation of the naval aircraft carrier, CVNX-1, in 2013. This will increase efficiency and reduce maintenance.
GERELATEERD WERKBLAD:
- Werkblad Wisselstroommotortheorie
Industriële technologie
- Inductiemotor
- Inductiemotor, groot
- Eenfasige inductiemotoren
- AC-commutatormotoren
- Technische tip:motoren
- Elektromotorveiligheid:verschillende fasen en veiligheidsmaatregelen
- 4 belangrijke soorten wikkelfouten in AC-elektromotoren
- Over industriële motoren en toepassingen
- Een inleiding tot de BLDC-motor
- 5 redenen waarom TEFC-motoren falen
- Goed onderhoud van compressormotoren