


Besturingslussen:open versus gesloten
 De feedback-regellus is waarschijnlijk de meest innovatieve en betrouwbare tool op het gebied van regeltechniek. Regellussen als geheel zijn efficiënt hulpmiddelen voor het bepalen van problemen en problemen in een systeem, het bereiken van instelwaarden in processen en het handhaven van de stabiliteit van een systeem. Er zijn drie hoofdtypen regelkringsystemen:closed-loop, open-loop en gecombineerd open en closed-loop. Closed-loop vertrouwt meer op feedback, terwijl open-loop dat niet doet. Combined gebruikt zowel feedback als feedforward om een proces te stabiliseren.
De feedback-regellus is waarschijnlijk de meest innovatieve en betrouwbare tool op het gebied van regeltechniek. Regellussen als geheel zijn efficiënt hulpmiddelen voor het bepalen van problemen en problemen in een systeem, het bereiken van instelwaarden in processen en het handhaven van de stabiliteit van een systeem. Er zijn drie hoofdtypen regelkringsystemen:closed-loop, open-loop en gecombineerd open en closed-loop. Closed-loop vertrouwt meer op feedback, terwijl open-loop dat niet doet. Combined gebruikt zowel feedback als feedforward om een proces te stabiliseren.
Het volgende diagram illustreert de volledige feedbackregellus:
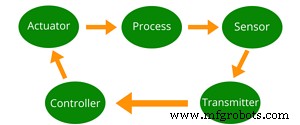
Als we dit opsplitsen, krijgen we:
- Het proces dat gecontroleerd moet worden
- Een sensor die de fysieke parameter meet van het proces
- Een zender die de zintuiglijke informatie omzet via elektronische signalen
- Een controller die het signaal en het setpoint vergelijkt
- Een actuator die een corrigerende actie uitvoert als reactie op het signaal dat door de controller wordt verzonden
In een gesloten regelsysteem wordt de sequentie herhaald totdat het setpoint is bereikt. Enkele veelvoorkomende voorbeelden zijn de thermostaat voor de oventemperatuur of de cruisecontrol in een auto. Maar dit betekent niet dat alle automatische bewerkingen feedback nodig hebben om goed te kunnen functioneren. Open-loop-configuraties, die ervan uitgaan dat de sequentie slechts één keer nodig is, kunnen verschillende bewerkingen uitvoeren zonder dat constante bevestigingen via feedback nodig zijn.
Soorten Closed-Loop-besturing
Continue regeling met gesloten lus
Niet alle closed-loop processen zijn hetzelfde. Voor een continu regelproces handhaaft de feedbacklus de door de gebruiker ingestelde waarde van de regelvariabele, ook wel het setpoint genoemd. De controller voert een eenvoudige aftrekking van de laatste sensorische meting uit van het setpoint. De grootte van het resultaat bepaalt de corrigerende inspanning die door de controller, via de actuator, zou worden toegepast.
Een auto waarvan de cruisecontrol is geactiveerd, zou bijvoorbeeld de snelheidsmeter als sensor gebruiken om de snelheid te meten. Als de snelheid lager is dan de ingestelde waarde, versnelt de controller de auto door meer brandstof toe te voeren. Als de auto te snel rijdt, wordt de brandstoftoevoer proportioneel verlaagd. Dit proces van maatregel-beslis-aansturing gaat door totdat de snelheid van de auto het setpoint bereikt.
Discrete regeling met gesloten lus
Bij continue closed-loop regeling wordt de variabele van belang te allen tijde gemeten, maar bij discrete regelsystemen zou een triggergebeurtenis resulteren in de maatregel-beslis-activeringsreeks. Mensen gebruiken bijvoorbeeld hun ogen om de status van het omgevingslicht buiten te bepalen voordat ze gaan rijden en om al dan niet de koplampen aan te doen. Er zijn geen verdere aanpassingen nodig tot een activerende gebeurtenis, zoals een geval van zware bewolking of het begin van de volgende reis.
Discrete feedbackloops zijn veel eenvoudiger dan continue, omdat ze geen continue monitoring of problemen zoals scherpe overshoots met zich meebrengen. Onmiddellijke resultaten worden verkregen wanneer de koplampen worden ingeschakeld in vergelijking met de geleidelijke resultaten met cruise control.
Open-lusbesturing
Zoals eerder vermeld, gaan open-loop-controllers ervan uit dat het setpoint in één keer wordt bereikt en passen ze een enkele regelinspanning toe wanneer de trigger optreedt. Deze controllers kunnen ook de mogelijkheid krijgen om de resultaten te meten. Is de motor bijvoorbeeld gestart of gestopt? Deze metingen zijn voornamelijk voor veiligheidsoverwegingen en maken geen deel uit van de reeks.
Af en toe kan een closed-loop-controller werken als een open-loop-controller vanwege een sensorstoring of handmatige overname door een operator. De operator moet ingrijpen wanneer een feedbackcontroller zijn stabiliteit niet kan behouden. Een krachtige drukregelaar kan bijvoorbeeld een daling in de lijndruk mogelijk niet goed compenseren, wat resulteert in frequente overshoots en oscillaties. In deze gevallen moet de operator de besturing handmatig overnemen om het systeem te stabiliseren.
Er zijn ook verschillende processen waarvoor stabiele besturingen te moeilijk te configureren zijn, waardoor ervaren operators het vaak moeten overnemen. Operators kunnen hun ervaring gebruiken om de procesingangen te manipuleren en het gewenste setpoint veel sneller te handhaven dan de controller. Maar dit is niet de ideale situatie met het gebruik van regelkringen. Dus wat zou er gebeuren als zowel open als closed-loop controles werden gecombineerd?
Combineren van open en gesloten lusbediening
Open-lusbesturing heeft het nadeel van onnauwkeurigheid, aangezien het verwijderen van het feedbackgedeelte ook de garantie van de besturingsinspanning wegneemt, waardoor de nodige besturingsinspanning wordt geleverd. Open en gesloten-lusbesturing kan worden gecombineerd om een feedforward-strategie te vormen als tegelijkertijd snelheid en nauwkeurigheid vereist zijn.
Een feedforward-controller is gebaseerd op een wiskundig model van het proces, zodat alle controle-inspanningen vergelijkbaar zijn met die van een ervaren ingenieur die in de handmatige modus werkt. Het meet de resultaten van de inspanningen van een initiële open-loop en past verdere correcties toe om fouten te elimineren en het instelpunt te bereiken. Dit type controller is handig wanneer de juiste sensoren beschikbaar zijn om een veelvoud aan criteria te meten. Als het toekomstige effect kan worden voorspeld, kan de controller preventieve maatregelen nemen om ervoor te zorgen dat de fout binnen een minimale tijd wordt verwijderd.
Als een auto bijvoorbeeld is uitgerust met zowel een radar als cruisecontrol, kan deze een heuvel zien opkomen en versnellen om te compenseren voor de extra kracht die nodig is om de heuvel op te gaan. Zonder de voorafgaande kennisgeving zou de cruisecontrol nooit weten dat hij moet accelereren, wat ertoe leidt dat de closed-loop corrigerende maatregelen toepast totdat het instelpunt weer is bereikt.
Elk type regelkring heeft zijn toepassingen. Regeling met open lus is het meest geschikt voor situaties waarin het instelpunt in één keer haalbaar is. Gesloten regelkringen zijn het beste voor situaties die vallen en opstaan vereisen om het instelpunt te bereiken. En de gecombineerde open en gesloten regeling vereist wiskundige modellen en soms sensoren om goed te functioneren. Het scala aan opties stelt operators in staat om de juiste regelkring voor hun behoeften te kiezen.
Automatisering Besturingssysteem
- Phase-locked loops
- Besturingscircuits
- Neon A Shop Open/Closed Makerspace-teken op Raspberry Pi 2 (El Paso, TX)
- Open CV Robot
- Betere manieren om problemen met automatisering en procescontrolekringen op te lossen
- Voordelen van industriële controleconvergentie
- Marktgroei voor laagspanningsregeling
- Een migratieproject van een besturingssysteem overleven
- Industriële bedieningspanelen begrijpen
- Basisprincipes van het ontwerp van het bedieningspaneel
- Ruimtebesparende bedieningspanelen