


Voeg LiDAR toe aan ADAS voor de veiligheid van voetgangers
De meeste nieuwe voertuigen die tegenwoordig in de Verenigde Staten worden verkocht, zijn uitgerust met geavanceerde rijhulpsystemen (ADAS) die standaard of optioneel zijn uitgerust met Pedestrian Automatic Emergency Braking (PAEB). Hoewel de modernste ADAS het rijden op snelwegen en hoge snelheden heeft verbeterd, is de basisbehoefte voor het beperken van botsingen met voetgangers en fietsers grotendeels onbeantwoord gebleven.
Meer dan 6000 voetgangers komen elk jaar om het leven bij verkeersgerelateerde ongevallen in de Verenigde Staten, meldde de National Highway Traffic Safety Administration (NHTSA). Een rapport van de Governors Highway Safety Association merkte op dat 75 procent van deze dodelijke slachtoffers 's nachts plaatsvindt. Het gebruik van ADAS op basis van camera- en radartechnologieën is onvoldoende gebleken om deze uitdaging aan te gaan. Onafhankelijke tests uitgevoerd door NHTSA en de American Automobile Association (AAA) tonen aan dat PAEB-systemen voetgangers vaak niet beschermen in donkere omstandigheden.
PAEB testen in donkere omstandigheden

PAEB-systemen kunnen jaarlijks duizenden levens redden door de prestaties in donkere omstandigheden te verbeteren. Tussen 2009 en 2018 steeg het aantal dodelijke slachtoffers onder voetgangers met 53 procent. Van deze toename werd 90 procent veroorzaakt door nachtelijke ongevallen, volgens de rapporten van het Insurance Institute for Highway Safety (IIHS) en de Governors Highway Safety Association. NHTSA heeft gemeld dat in 2018 76 procent van de 6283 dodelijke ongevallen met voetgangers in de VS plaatsvond in donkere omstandigheden.
Beoordelingen door AAA en NHTSA hebben aangetoond dat PAEB-functies vaak niet in staat zijn crashes 's nachts te voorkomen. In het AAA-rapport stond:"Er is weinig tot geen openbaar beschikbare informatie over de prestaties van voetgangersdetectiesystemen bij weinig licht. Op basis van statistieken van voertuig-/voetgangersongevallen is deze omgeving bijzonder belangrijk om te evalueren.” Het toevoegen van die PAEB-test in donkere omstandigheden zou die leegte opvullen. "Hoewel deze parameter zeer uitdagend is, is het toch een redelijk testscenario gezien het gebrek aan verlichting in veel natuurlijke omgevingen."
AAA ontdekte dat in een test met vier voertuigen geen enkele de bestuurder waarschuwde of automatisch afremde voor een voetganger die de weg overstak in donkere omstandigheden. Op basis van deze resultaten adviseert AAA dat "bestuurders niet mogen vertrouwen op hulp van de huidige voetgangersdetectiesystemen tijdens nachtelijk rijden of andere omgevingen met verminderd zicht." Als afsluiting van de analyse merkte het AAA-rapport op dat, hoewel "in de gebruikershandleiding van elk testvoertuig staat dat het geïntegreerde voetgangersdetectiesysteem 's nachts of bij slecht weer zoals regen, sneeuw, ijzel of mist misschien geen voetgangers waarneemt ... het onweerlegbaar is dat assistentie van een voetgangersdetectiesysteem zou van pas komen tijdens nachtelijke omstandigheden en zou mogelijk het moment van grootste nood kunnen zijn.”
Onderzoek naar de huidige protocollen die worden gebruikt door NHTSA's New Car Assessment Program (NCAP), European New Car Assessment Program (Euro NCAP) en IIHS toont echter aan dat prestaties onder nachtelijke omstandigheden slechts zelden worden getest als basis voor veiligheidsbeoordelingen en onderscheidingen van voertuigen.
Velodyne LiDAR (San Jose, CA) stelt daarom voor dat beoordelingsorganisaties in hun PAEB-testprotocollen scenario's opnemen die in donkere omstandigheden worden uitgevoerd. Door deze benadering te volgen, zullen consumenten van voertuigen die zijn uitgerust met PAEB-functies de beperkingen van de prestaties van hun voertuig begrijpen en autofabrikanten aanmoedigen om ADAS-functies te verbeteren die jaarlijks duizenden levens kunnen redden. Om precies te zijn, deze tests moeten worden uitgevoerd met minder dan één lux omgevingsverlichting, met behulp van de dimlichten van het testvoertuig en zonder de hulp van straatverlichting.
LiDAR en camera/radar PAEB-systemen vergelijken
Op LiDAR gebaseerde PAEB-oplossingen hebben inherente sterke punten in vergelijking met camera- en radarcombinaties.
Camera's kunnen een zeer hoge resolutie hebben, maar ze vereisen meestal meerdere modules en extra verwerking om de afstanden van objecten tot een voertuig te berekenen. Ook presteren camera's, net als het menselijk oog, relatief slecht in donkere omstandigheden. In een rapport van het Department of Transportation (DOT) uit 2018 staat:"Op zicht gebaseerde systemen zijn beter in staat [dan op radar gebaseerde systemen] om stilstaande mensen te detecteren, maar zijn beperkt tot gebruik bij daglicht in goed verlichte omgevingen."
In vergelijking met camera's, merkte het DOT-rapport op, functioneert radar 's nachts goed en kan afstandsmetingen leveren. Maar radar heeft geen resolutie die hoog genoeg is om de precieze locatie van een object waar te nemen of onderscheid te maken tussen meerdere objecten die zich dicht bij elkaar bevinden. Radar kan ook stilstaande of langzaam bewegende objecten niet detecteren. Als gevolg van deze tekortkomingen hebben op camera's en radar gebaseerde PAEB-functies moeite om voetgangers in nachtelijke omstandigheden te beschermen.
Warmtebeeldvorming is af en toe voorgesteld als een mogelijke aanvulling op camera en radar in PAEB-toepassingen. Deze technologie vertoont echter zijn eigen zwakke punten en pakt die van de huidige camera- en radarsystemen niet adequaat aan. Net als bij optische camera's hangt het vermogen van een voertuigsysteem om objecten te detecteren met thermische sensorgegevens af van het vermogen van de sensor om het contrast tussen een object en zijn omgeving correct waar te nemen en door te geven. Als gevolg hiervan kunnen beide detectiemodaliteiten objecten missen die opgaan in hun achtergrond. In het geval van thermische beeldvorming zou dit het gevolg zijn van het mengen van vergelijkbare warmte-eigenschappen, in plaats van vergelijkbare kleuren of optische illusies, zoals bij camera's.
Daarentegen heeft LiDAR geen van deze kenmerkende nadelen van camera-, radar- en thermische sensoren. LiDAR fungeert als zijn eigen lichtbron, zodat hij zowel in het donker als bij daglicht goed presteert. Het biedt ook snelle en nauwkeurige meetgegevens met een resolutie die hoog genoeg is voor nauwkeurige realtime detectie van vrije ruimte terwijl meerdere objecten binnen een scène worden gevolgd.
Betaalbare op LiDAR gebaseerde PAEB-oplossingen die momenteel beschikbaar zijn, zouden de prestaties onder alle lichtomstandigheden aanzienlijk verbeteren. Dit zou worden bevestigd als regelgevende en testbureaus donkere tests toevoegen aan hun beoordelingsprotocollen.
Testen van op LiDAR gebaseerd PAEB-systeem tegen camera- en radartechnologie
Om aan te tonen dat verbeterde PAEB-prestaties 's nachts kunnen worden bereikt door direct beschikbare technologieën te implementeren, heeft Velodyne zijn op LiDAR gebaseerde PAEB-systeem getest met een hoog gewaardeerd PAEB-systeem dat is gebouwd rond camera en radar. De tests werden uitgevoerd met een door de bestuurder gecontroleerde snelheid van 30 mph op een rechte baan, een uur na zonsondergang, met minder dan één lux omgevingsverlichting.
De twee testvoertuigen hadden tijdens de tests elk hun dimlicht aan. De stationaire dummy-doelen voor kinderen en volwassenen die in de tests werden gebruikt, waren compatibel met de huidige testprotocollen die zijn voorgeschreven door organisaties zoals IIHS en Euro NCAP.
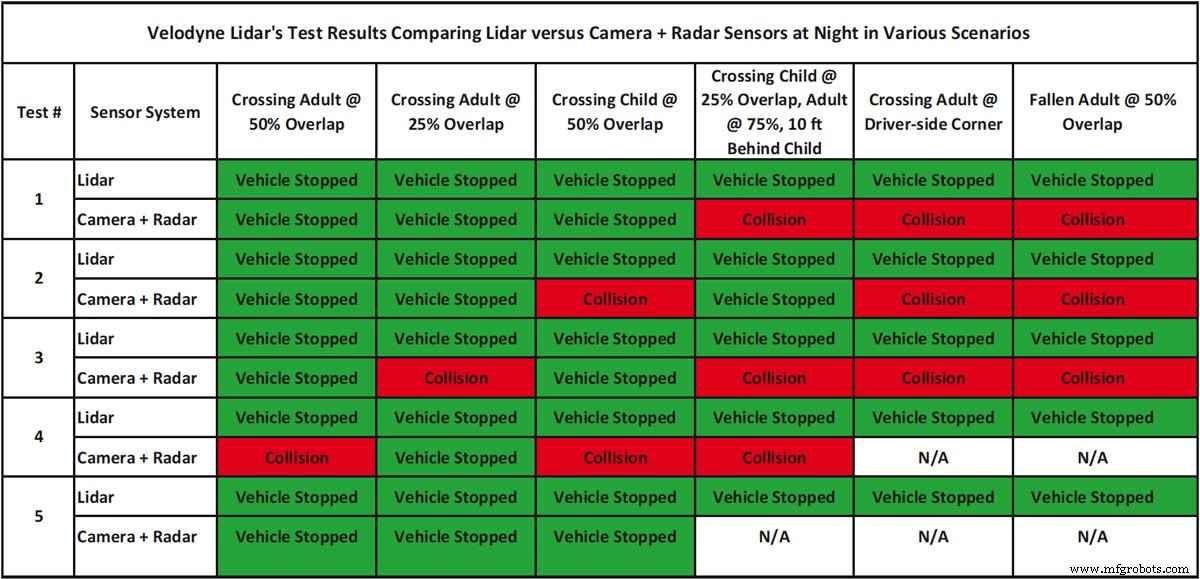
De scenario's waarin voertuigen werden geëvalueerd, waren onder meer:
-
Overstekende volwassene met 50 procent overlap (in het midden van de breedte van het testvoertuig)
-
Overstekende volwassene met 25 procent overlap
-
Kruisend kind met 50 procent overlap
-
Kruisend kind op 25 procent, volwassene @ 75 procent, 10 ft achter kind
-
Overstekende volwassene op hoek bestuurderskant
-
Gevallen volwassene met 50 procent overlap
Velodyne testte beide voertuigen in elk scenario vijf keer, of totdat het voertuig drie keer in botsing kwam met het doelwit, om schade aan de doelen en voertuigen te minimaliseren.
De resultaten van de nachtelijke tests ondersteunen de bevindingen van AAA en NHTSA dat camera- en radargebaseerde
PAEB-systemen falen vaak in donkere omstandigheden. Uit de tests bleek dat het uitvalpercentage vooral duidelijk was in scenario's waarbij een kind, meer dan één voetganger, een volwassene op de hoek van het voertuig of een volwassene die voor het voertuig gevallen was, betrokken waren.
Het op Velodyne LiDAR gebaseerde PAEB-systeem daarentegen, uitgerust met Velodyne's Velarray H800-sensor en Vella™-software, stopte met succes op tijd om een crash vijf van de vijf keer te voorkomen voor elk getest scenario. Deze hardware- en softwarecomponenten worden ontwikkeld om te voldoen aan de functionele veiligheidseisen voor auto's die zijn gedefinieerd in de ISO-26262-norm. Velodyne's PAEB-oplossing combineert Vella en Velarray en is ontworpen voor ritten in de stad, in de voorsteden en op snelwegen tot 130 km/u.
Conclusie
Aangezien is aangetoond dat donkere nachtelijke omstandigheden gevaarlijk zijn voor voetgangers, stelt Velodyne voor dat voertuigbeoordelingsorganisaties de PAEB-tests uitbreiden met omgevingslichtomstandigheden van minder dan één lux. Tests uitgevoerd door AAA en NHTSA tonen aan dat nachtelijke prestaties een grote kans bieden voor verbetering van de huidige PAEB-systemen. Testen tonen aan dat een op LiDAR gebaseerde oplossing effectief is en klaar voor implementatie.
Dit artikel is geschreven door David Hall, oprichter en uitvoerend voorzitter van de raad van bestuur, Velodyne LiDAR (San Jose, CA). Neem voor meer informatie contact op met de heer Hall via Dit e-mailadres wordt beveiligd tegen spambots. U heeft Javascript nodig om het te kunnen zien. of bezoek hier .
Sensor
- Waarom uitmuntende betrouwbaarheid essentieel is voor veiligheid
- Veiligheidstips voor CNC-machines
- Ontwikkelen van een nieuw tijdperk voor slimmere voedselveiligheid
- Veiligheidstips voor het verplaatsen van zware machines
- Veiligheidsherinneringen voor het bedienen van vorkheftrucks
- 5 veiligheidstips voor het voorbereiden van zwaar materieel
- Stop! 3 tips voor de veiligheid van bovenloopkranen
- 3 tips voor veiligheidsonderhoud voor kettingtakels voor kranen
- 7 slimme veiligheidstips voor offshore-rigs
- 9 effectieve veiligheidstips voor de industriële werkplek
- Maak veiligheidsprocedures voor werknemers en technici