


Met AI krijgen robotachtige exoskeletten zelfbeheersing
Robotica-onderzoekers ontwikkelen exoskeletbenen die hun stappen zelfstandig kunnen maken, met behulp van geavanceerde kunstmatige intelligentie (A.I.)-technologie. De zelfgestuurde benen kunnen op een dag de bewegingen van ouderen en mensen met een lichamelijke handicap ondersteunen.
Het systeem, gebouwd en getest door onderzoekers van de Universiteit van Waterloo, combineert computervisie en deep-learning A.I. om een mensachtige gang na te bootsen. Door te 'leren' van een verzameling voorbeeldwandelingen door een omgeving, past het systeem zijn bewegingen aan op basis van de omgeving die het waarneemt.
"We geven robotische exoskeletten een visie zodat ze zichzelf kunnen beheersen", zegt Brokoslaw Laschowski , een promovendus in systeemontwerptechniek die een onderzoeksproject van de Universiteit van Waterloo leidt genaamd ExoNet .
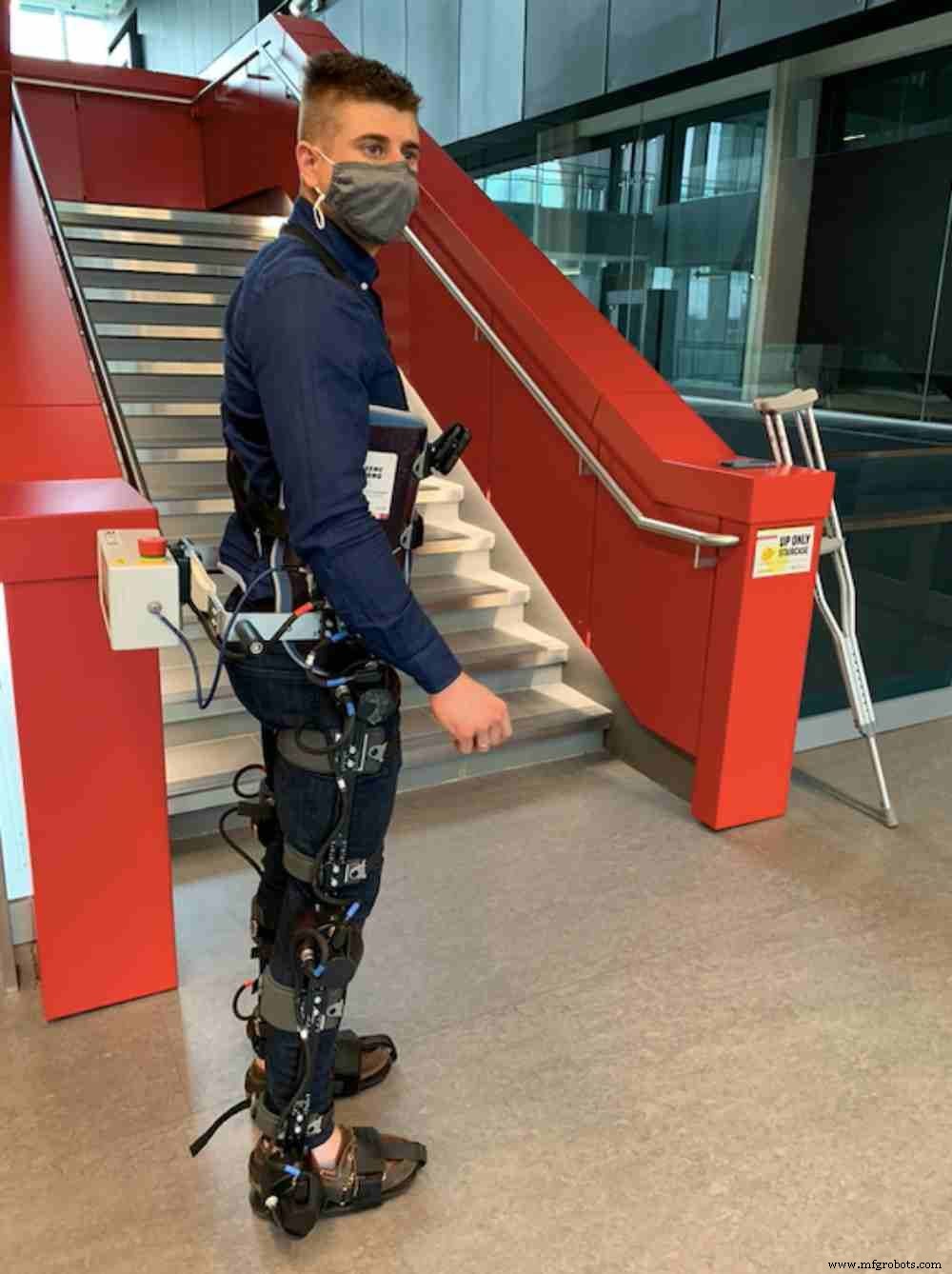
Het ExoNet-systeem, ondersteund door kunstmatige intelligentie, put uit trainingsgegevens die door het team zijn verzameld. Met draagbare camera's vastgebonden aan hun borst (zoals weergegeven in de bovenstaande afbeelding), maakten Laschowski en zijn collega-onderzoekers video's van binnen- en buitenomgevingen.
A.I. computersoftware verwerkte vervolgens de videofeed om trappen, deuren en andere kenmerken in de omgeving nauwkeurig te herkennen.
De prestatie werd gedetailleerd beschreven in het tijdschrift Frontiers in Robotics and AI . (Verken een onderzoeksdataset met betrekking tot dit autonome exoskeletproject.)
Het nieuwste in een reeks artikelen over de gerelateerde projecten, Simulation of Stand-to-Sit Biomechanics for Robotic Exoskeletons and Prostheses with Energy Regeneration , verschijnt in het tijdschrift IEEE Transactions on Medical Robotics and Bionics.
Motoraangedreven exoskeletbenen zijn al eerder ontworpen, maar de drager heeft bijna altijd een joystick of smartphone-applicatie nodig om hun bewegingen te besturen.
Meer robots op technische briefing
Een robot die wordt ontwikkeld aan de Universiteit van Tel Aviv "hoort" elektrische signalen dankzij een natuurlijke sensor:het oor van een dode sprinkhaan.
Een nieuwe robot heeft geen elektronica nodig om te bewegen - alleen een constante bron van perslucht.
"Dat kan onhandig en cognitief veeleisend zijn", zei Laschowski. "Elke keer dat je een nieuwe bewegingsactiviteit wilt uitvoeren, moet je stoppen, je smartphone pakken en de gewenste modus selecteren."
De aanpak van de Universiteit van Waterloo biedt een meer geautomatiseerde controle, dankzij de A.I. en computervisiemogelijkheden.
De volgende fase van het ExoNet-onderzoeksproject omvat het verzenden van instructies naar motoren zodat robotachtige exoskeletten trappen kunnen beklimmen, obstakels kunnen vermijden of andere passende acties kunnen ondernemen op basis van analyse van de huidige beweging van de gebruiker en het aankomende terrein.
Daarnaast werken de onderzoekers ook aan het verbeteren van de energie-efficiëntie van motoren voor robotachtige exoskeletten door menselijke bewegingen te gebruiken om de batterijen zelf op te laden.
"Onze controlebenadering vereist niet per se menselijk nadenken", zegt Laschowski, die wordt begeleid door engineeringprofessor John McPhee , de Canada Research Chair in Biomechatronic System Dynamics, in zijn Motion Research Group laboratorium. "Net als autonome auto's die zichzelf besturen, ontwerpen we autonome exoskeletten die voor zichzelf lopen."
In een Q&A met Tech Briefs hieronder legt Brokoslaw Laschowski meer uit over de ExoNet-technologie en waarom een exoskelet met eigenschappen die vergelijkbaar zijn met die van een zelfrijdende auto, ook voertuigachtige veiligheidsmaatregelen moet hebben.
Tech Briefs : Hoe zorg je voor veiligheid? Kan de gebruiker de controle overnemen als het exoskelet per ongeluk iets gevaarlijks doet? De analogie is ADAS versus volledig autonome voertuigen. Hoe zou de gebruiker de snelheid en het stoppen en gaan regelen? Hoe zouden dergelijke bedieningselementen samenwerken met de gebruiker?
Brokoslaw Laschowski :Veiligheid is het allerbelangrijkste. Deze robotapparaten zijn ontworpen om ouderen en mensen met een lichamelijke handicap te helpen (bijv. beroerte, dwarslaesie, hersenverlamming, osteoartritis, enz.). We kunnen het exoskelet niet veroorloven om verkeerde beslissingen te nemen en mogelijk valpartijen of verwondingen te veroorzaken. Daarom richten we ons volledig op het verbeteren van de nauwkeurigheid en controle van de classificatie door een omgevingsherkenningssysteem te ontwikkelen waarmee het exoskelet autonoom de loopomgeving kan detecteren en in realtime kan reageren. We optimaliseren de systeemprestaties met behulp van computers en draagbare prototypes met 'gezonde' controles vóór klinische tests. De gebruiker van het exoskelet zal echter altijd de mogelijkheid hebben om handmatige controle over te nemen (bijvoorbeeld stoppen en sturen).
Tech Briefs :Kun je me door een applicatie leiden die je voor ogen hebt voor dit soort exoskelet? Waar zal dit het meest waardevol zijn?
Brokoslaw Laschowski :Deze robotapparaten zijn ontworpen om ouderen en mensen met een lichamelijke handicap te helpen bij bewegingsactiviteiten. Een voorbeeldtoepassing van ons omgevingsadaptieve geautomatiseerde besturingssysteem is het schakelen tussen verschillende bewegingsactiviteiten. In in de handel verkrijgbare exoskeletten, bijvoorbeeld bij de overgang van lopen op een vlakke ondergrond naar traplopen, nadert de gebruiker de trap, stopt en communiceert handmatig met het exoskelet over de beoogde activiteit met behulp van een mobiele interface, drukknoppen of andere handbedieningen (afhankelijk van het apparaat).
Met een autonoom controlesysteem daarentegen, wanneer de gebruiker een hellende trap nadert, detecteren en classificeren ingebouwde sensoren zoals traagheidsmeeteenheden (IMU's) continu de huidige bewegingen van de gebruiker, en het draagbare camerasysteem detecteert en classificeert het aankomende terrein. De fusie van deze verschillende sensortechnologieën en patroonherkenningsalgoritmen wordt gebruikt om de bewegingsintentie van de gebruiker te voorspellen en het exoskelet te besturen.
Tech Briefs :Hoe wordt het exoskelet "getraind" om te werken zonder menselijk denken?
Brokoslaw Laschowski :We gebruiken computervisie en deep learning voor omgevingsclassificatie. Met behulp van miljoenen real-world afbeeldingen worden onze convolutionele neurale netwerken automatisch en efficiënt getraind om de verschillende wandelomgevingen te voorspellen die in de afbeeldingen worden getoond. Deze informatie over de loopomgeving wordt vervolgens gebruikt om het exoskelet van de robot te besturen in termen van optimale padplanning, het vermijden van obstakels en het schakelen tussen verschillende bewegingsactiviteiten (bijvoorbeeld lopen op een vlakke ondergrond naar traplopen).
Tech Briefs :Wat volgt er voor dit exoskelet? Waar werk je nu aan?
Brokoslaw Laschowski :Vanuit een veiligheidskritisch perspectief moeten deze door AI aangedreven exoskeletbesturingssystemen nauwkeurig en in realtime presteren. Daarom richten we ons op het verbeteren van de nauwkeurigheid van de omgevingsclassificatie, terwijl we neurale netwerkarchitecturen gebruiken met minimale reken- en geheugenopslagvereisten om on-board realtime inferentie te bevorderen.
Wat denk je? Deel uw vragen en opmerkingen.
Sensor
- Krijg controle over uw productie met effectieve capaciteitsplanning
- Toegangscontrole met QR, RFID en temperatuurverificatie
- Kwaliteitscontrole verbeteren met de Deming-cyclus
- Betere kwaliteitscontrole met 3D-geprinte onderdelen
- Robotische transfersystemen besturen met laserafstandssensoren
- Bedien muntvangers met Arduino
- Arduino met Bluetooth om een LED te bedienen!
- Automatisering van kwaliteitscontrole met behulp van technologie
- Draaibank Met CNC
- Meetmethode Tests Fit van exoskeletten
- Bovenlichaam robotachtig exoskelet