


Opties in overvloed bij het selecteren van een sensor voor motorfeedback
In veel motion control-toepassingen is het noodzakelijk om de positie, snelheid en misschien zelfs versnelling van de rotor of de belasting van een motor te kennen. Afhankelijk van de toepassing en de ontwerpspecificaties, moet de motorcontroller deze parameters mogelijk precies, bij benadering of misschien helemaal niet kennen. Door de motorsituatie en rotorstatus te kennen, heeft de motorcontroller een gesloten-lusscenario (Figuur 1).
Natuurlijk zijn de snelheid, positie en acceleratie van een motor nauw met elkaar verbonden. Omdat snelheid de afgeleide (tijdsveranderingssnelheid) is van positie en versnelling de afgeleide van snelheid is, is het mogelijk om alle drie de factoren te bepalen, zelfs als je er maar één van kent (let ook op het complement:snelheid is de integraal van versnelling en positie is de integraal van snelheid).

In de praktijk is deze methode voor het bepalen van bijbehorende parameters echter vaak (maar niet altijd) ontoereikend vanwege resolutie en ruis. Als u bijvoorbeeld weet dat de rotor weer een omwenteling heeft voltooid, vertelt u over alle drie de variabelen, maar met een zeer lage en meestal onaanvaardbare resolutie. Afhankelijk van de toepassing kunnen de benodigde resolutie en nauwkeurigheid variëren van ruw tot matig tot nauwkeurig. Een CNC-bewerkingsmachine heeft nauwkeurige rotorinformatie nodig, een elektrische raambediening van een auto kan geschatte gegevens accepteren en een kledingwasmachine of -droger zal tevreden zijn met alleen grove informatie.
De cirkel sluiten
Voor het detecteren van de rotorpositie of beweging zijn de meest gebruikelijke opties resolvers, optische of capacitieve encoders en Hall-effect-apparaten, in ruwweg dalende volgorde van precisie, resolutie en kosten. Deze sensoren zijn heel verschillend in hun fysieke ontwerp, implementatie en elektrische interface, dus gebruikers moeten begrijpen wat nodig is, wat de beste keuze is in een bepaalde toepassing en hoe ze de sensor zullen koppelen aan het circuit van de controller.
Incrementele encoders - gebruikt wanneer alleen relatieve positie nodig is of kosten een probleem zijn - worden meestal gebruikt met AC-inductiemotoren. Daarentegen worden absolute encoders - die op elke positie een andere binaire output geven, zodat de aspositie absoluut wordt bepaald - vaak gecombineerd met permanent-magneet borstelloze motoren in servotoepassingen. De applicatie is natuurlijk de belangrijkste factor die bepaalt of incrementele of absolute informatie nodig is.
Hoewel de meeste motorbesturing nu wordt gedaan via een digitale regellus, is het sensorsignaal zelf ofwel volledig analoog en moet het worden gedigitaliseerd of is het een digitaal signaal maar met spanningen en andere attributen die het incompatibel maken met standaard digitale circuits. Hoewel sommige feedbacksensoren worden aangeboden met onbewerkte uitgangen die naar wens kunnen worden aangepast, hebben veel ook geconditioneerde, kant-en-klare uitgangen die compatibel zijn met standaard I/O-poorten, formaten en protocollen.
Hoewel meer resolutie misschien een goed idee lijkt, is dat in de praktijk misschien niet zo. Te veel van een schijnbaar goede zaak - resolutie - kan een systeem vertragen door extra verwerking van informatie te vereisen die niet nodig of nuttig is, dus het is een goed idee om de resolutie te beperken tot het minimum dat nodig is.
Oplossers
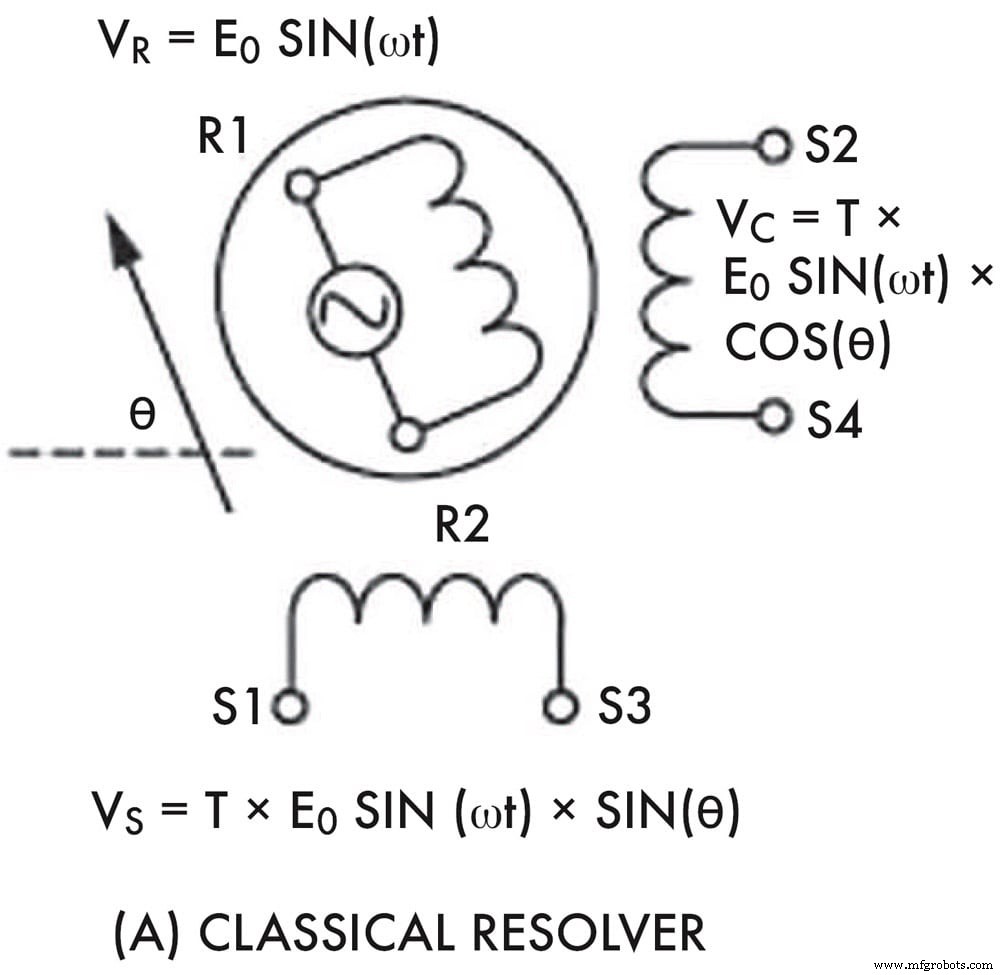
Resolvers zijn uiterst nauwkeurige, robuuste, absolute positieomzetters. Ze zijn gebaseerd op fundamentele transformatorprincipes, met één primaire wikkeling plus twee secundaire wikkelingen, die in kwadratuur (90°) ten opzichte van elkaar zijn georiënteerd (Figuur 2). De effectieve windingsverhouding en polariteit tussen de primaire en secundaire wikkelingen varieert, afhankelijk van de hoek van de as. De primaire wordt geëxciteerd met een referentie AC-golfvorm met een constante frequentie, die kan variëren van 50 Hz/60 Hz tot enkele honderden kHz, en de uitgangen van de secundaire wikkelingen zullen uit fase zijn vanwege hun fysieke plaatsing. De piekspanningen van de secundairen zullen variëren naarmate de as roteert en zullen evenredig zijn met de ashoek. Door deze uitgangen te demoduleren met het primaire signaal als referentie, kan de resolverschakeling een hoge resolutie uitlezing van de ashoek leveren.
De resolver is niet alleen nauwkeurig, maar ook robuust. Resolvers hebben geen fysiek contact tussen primaire en secundaire zijde, geen aparte borstels of lagers naast die aan de motor zelf, geen wrijvingspunten die leiden tot slijtage van onderdelen en geen mogelijkheid voor verontreinigingen (zoals olie) om te interfereren met opereren. Resolvers worden veel gebruikt in extreem uitdagende situaties, zoals hoekmeting in militaire kanonnen, vanwege hun mechanische robuustheid en prestaties.
Oplossers zijn echter vaak groot en relatief duur in vergelijking met alternatieven en vereisen relatief veel stroom, wat vaak onaanvaardbaar is in toepassingen met een laag vermogen. Ze vereisen ook relatief complexe schakelingen voor het genereren en demoduleren van de AC-golfvormen, hoewel dit bij moderne IC's veel minder een belemmering is. Ze geven een absolute positie-indicatie bij het opstarten en vereisen geen beweging om de beginhoek te indexeren of te bepalen. Deze functie is een must-have in sommige situaties en een don't-care in andere.
Codering voor positie, niet voor gegevens

Een optische encoder (de term encoder heeft hier niets te maken met het coderen van digitale gegevens) in een incrementele positie-uitlezing maakt gebruik van een lichtbron (LED), twee fotosensoren in kwadratuur en een glazen of plastic schijf ertussen (Figuur 3). De schijf heeft fijne geëtste lijnen die vanuit het midden uitstralen en terwijl deze draait, zien de sensoren patronen van licht en donker.
Het aantal lijnen op de schijf, en enkele andere technieken, bepalen de resolutie, die typisch 1.024, 2.048 of zelfs zo hoog als 4.096 counts per omwenteling is. In tegenstelling tot de transformatorachtige resolver, was de optische encoder geen apparaat voor de massamarkt tot de ontwikkeling van LED's met een lange levensduur en efficiënte fotosensoren.
Door de fysieke opstelling van de sensoren kan de encoder de draairichting bepalen. Een basisschakeling vertaalt de pulsreeksen van de twee sensoren (genaamd A/B-uitgangen) in een paar bitstromen die zowel beweging als richting aangeven (Figuur 4).

De encoder is een incrementele, niet absolute, bewegingsindicator. Om de absolute positie te bepalen, voegen de meeste encoders een derde spoor en fotosensor toe als een nulreferentiespoor; de as moet voldoende draaien om de nulreferentiepositie te passeren om dit te signaleren. Echte relatieve positie-uitlezing kan worden toegevoegd aan een optische encoder, maar deze maken de unit complexer.
Optische encoders bieden een zeer goede resolutie, maar zijn niet zo robuust als resolvers. Vuil kan interfereren met het optische pad en de encoderschijf kan vuil worden. Hun prestaties zijn echter meer dan voldoende voor veel toepassingen en ze zijn klein, lichtgewicht, energiezuinig, eenvoudig te bedienen en goedkoop.
Typische optische encoders voor motor- en rotatietoepassingen zijn de vergelijkbare HEDS-9000 en HEDS-9100 tweekanaalsmodules van Avago Technologies (Broadcom). Deze hoogwaardige, goedkope modules bestaan uit een LED-bron met lens en een geïntegreerde detectorschakeling in een kleine, C-vormige plastic verpakking, samen met aandrijf- en interface-elektronica (Figuur 5). Ze hebben een sterk gecollimeerde lichtbron en een speciale fysieke opstelling van de fotodetector, dus ze zijn zeer tolerant voor verkeerde uitlijning van de montage. (De schijf, het codewiel genoemd, wordt apart aangeschaft, met een resolutie van 500 CPR en 1.000 CPR voor de HEDS-9000 en tussen 96 CPR en 512 CPR voor de HEDS-9100. De modules bieden twee kanalen met TTL-compatibele A en B digitale uitgangen en vereisen een enkele 5-V voeding.)

De CUI AMT10-serie is een alternatief voor de optische encoder, gebaseerd op capacitieve principes in plaats van optische (Figuur 6). Deze encoders bieden een reeks robuuste, zeer nauwkeurige, modulaire eenheden die beschikbaar zijn in incrementele en absolute versies, met een resolutie tot 12 bits (4.096 counts) die door de gebruiker kan worden geselecteerd uit 16 waarden via een dubbele invoer met vier posities. lijnpakket (DIP)-schakelaar. De complementaire metaaloxide-halfgeleider (CMOS)-compatibele A/B-kwadratuuruitgangen van deze units worden gerapporteerd via een standaard seriële perifere interface (SPI).

In tegenstelling tot optische encoders, gebruiken de CUI AMT-apparaten een herhalend, geëtst patroon van geleiders op de bewegende en niet-bewegende delen van de encoder. Terwijl de encoder draait, neemt de relatieve capaciteit tussen de twee delen toe en af en deze verandering in capaciteit wordt gedetecteerd, enigszins analoog aan de uitgangen van de fototransistors in een optische encoder. Vuil en andere verontreinigingen hebben hier weinig nadelige gevolgen.
Houd er rekening mee dat een resolver of encoder ook een mechanisch apparaat is met montage-overwegingen en vereisten voor elektrische compatibiliteit. Om voorraad- en voorraadproblemen te minimaliseren, biedt CUI de AMT10-serie met een breed scala aan hulzen, afdekkingen en montagebases, zodat dezelfde basisencoder kan worden gebruikt voor een breed scala aan asdiameters en installaties.
Resolvers en encoders kunnen basisuitlezingen produceren met een resolutie van wel 1/100 van een graad (0,6 boogminuten) of beter, maar nauwkeurigheid is niet hetzelfde als de resolutie (nogmaals, sommige toepassingen houden zich meer bezig met een van deze dan met de andere) . Ongeacht of het ontwerp een resolver of encoder gebruikt, foutenbronnen treden op vanwege de temperatuur, de snelheid waarmee wijzigingen worden gevolgd, ongewenste faseverschuivingen en andere factoren. Verkopers van deze units hebben echter manieren bedacht om veel van deze tekortkomingen te elimineren, te annuleren of te compenseren, vaak door gebruik te maken van IC-gebaseerde schakelingen tussen de onbewerkte sensoruitgang en de geconditioneerde uitgang die naar de systeemcontroller gaat.
Hall-effect-apparaten komen sterk op
Een andere klasse van coderings- of sensorapparatuur is ook gebaseerd op een door de tijd versleten principe dat moderne halfgeleiderelektronica en verpakkingen vereist om algemeen betaalbaar, beschikbaar en effectief te worden. Verder is de kritische interfaceschakeling, die gebruik kan maken van de minuscule spanning en deze gemakkelijk kan koppelen aan een systeem, nu beschikbaar op de chip, wat het gebruik van deze technologie verder vereenvoudigt. Hall-effect-apparaten kunnen worden gebruikt om de stroom door een geleider die deel uitmaakt van de sensor te detecteren, of om de aanwezigheid of afwezigheid van een nabijgelegen magnetisch veld te detecteren.

Wat we kennen als het Hall-effect werd in 1879 ontdekt door Edwin Hall; een potentiaalverschil - de Hall-spanning - wordt geproduceerd over een elektrische geleider loodrecht op een elektrische stroom in de geleider en een magnetisch veld loodrecht op de stroom (Figuur 7).
Sommige Hall-effectsensoren gaan veel verder dan alleen het sensorelement zelf. De Melexis MLX90367 Triaxis-positiesensor is een monolithische absolute sensor-IC die gevoelig is voor de fluxdichtheid die orthogonaal en parallel aan het IC-oppervlak wordt aangebracht. Het is gevoelig voor de drie componenten van de fluxdichtheid, waardoor de MLX90367 (met het juiste magnetische circuit) de absolute positie van elke bewegende magneet kan decoderen (zoals een roterende positie van 0 tot 360°).

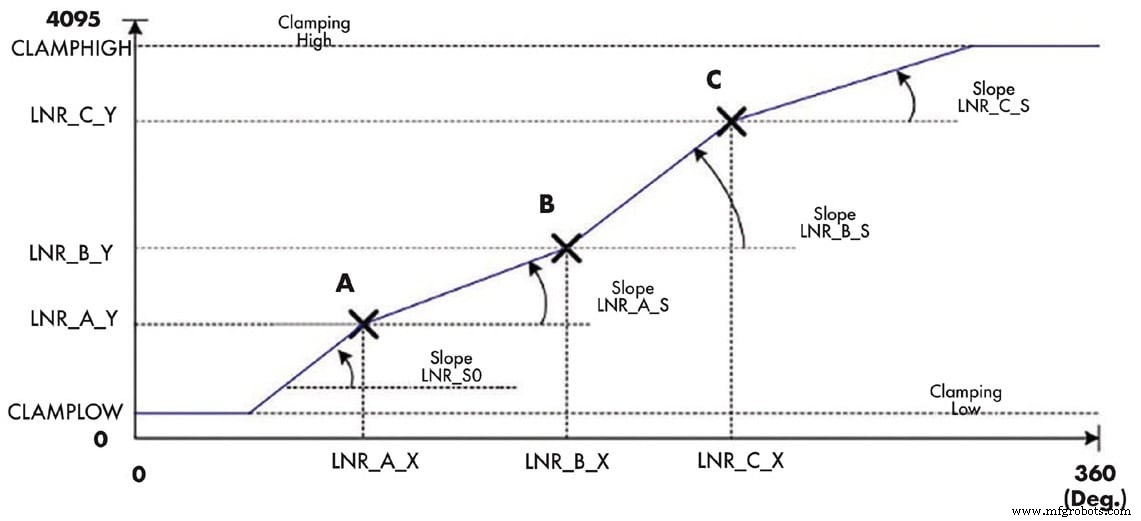
Intern bevat dit apparaat met 12-bits resolutie signaalverwerking op de chip, met een microcontroller en DSP (Figuur 8), zodat het de benodigde berekeningen kan uitvoeren plus correcties voor inherente niet-lineariteiten en meer (Figuur 9). Het ondersteunt ook een breed scala aan door de gebruiker te selecteren functies, functies en verschillende uitvoerformaten, waaronder een geavanceerd formaat met ingebouwde foutcorrectie genaamd SENT (SAE J2716-2010), dat veel wordt gebruikt in automobieltoepassingen.
De meeste magnetische encoders met Hall-effect gebruiken een wiel dat aan de motoras is bevestigd en het wiel heeft een reeks gemagnetiseerde noord- en zuidpolen rond de omtrek; het is de magnetische analogie met het wiel met optische encoder. Het wiel is meestal gemaakt van een spuitgegoten ferriet dat is ingebed in de poolarray. Een typisch wiel is gemagnetiseerd met 32 polen (16 noord en 16 zuid), dus de resolutie is veel minder dan voor een optische encoder of resolver, maar is vaak genoeg voor veel situaties. Een typische installatie heeft drie Hall-effectsensoren, elektrisch 120° uit elkaar geplaatst, om commutatie van het wiel te detecteren.
Samenvatting
Ontwerpers die motorpositie, snelheid of acceleratie moeten voelen, hebben een breed scala aan opties die de vele belangrijke parameters en prestatiekenmerken omvatten. Resolvers, optische en capacitieve encoders en Hall-effect-apparaten hebben allemaal een lange en bewezen staat van dienst, plus uitgebreide ondersteuning via applicatiekennis.
De keuze kan worden bepaald door één doorslaggevende factor - zoals robuustheid of laag vermogen - of door traditioneel en gebruikelijk gebruik in een bepaalde situatie. Als eenmaal is besloten welke basistechnologie moet worden gebruikt, zijn er veel levensvatbare leveranciers en onderdelen van elk beschikbaar, dus de beslissing over een specifiek apparaat kan wat onderzoek vergen om de afwegingen beter te begrijpen.
Dit artikel is geschreven door Bill Schweber voor Mouser Electronics, Mansfield, TX. Voor meer informatie, bezoek hier .
Sensor
- Renesas breidt microcontroller-opties voor servobesturing in industriële robots uit
- Inductieve positiesensor voor industriële motoren biedt hoge snelheid, hoge nauwkeurigheid
- 5 vragen om te stellen bij het selecteren van materialen voor moderne producten
- Ultragevoelige, veerkrachtige sensor voor slim textiel
- Draagbare gassensor voor gezondheids- en milieubewaking
- Geminiaturiseerde, draadloze zuurstofsensor voor zieke baby's
- Zachte sensor verhoogt vingertopgevoeligheid voor robots
- Ultradunne sensor voor slimme contactlenzen
- Inductieve contactloze positiesensor
- Sensorfilm voor ruimtevaart
- Contactloze tip/kantelsensor