


Referentieontwerp vereenvoudigt industriële robotmotorbesturing
Trinamic, nu onderdeel van Maxim Integrated, demonstreerde een reeks oplossingen voor vermogensregeling in de voorhoede van APEC, waaronder de nieuwste oplossingen die de ontwikkeling van end-of-arm tooling (EoAT) voor industriële robotica en de eenassige servocontroller vereenvoudigen. bestuurder met geïntegreerde motion control. In een interview met Power Electronics benadrukten Jeff DeAngelis, Vice President Industrial Communications bij Maxim Integrated, evenals Jonas Proeger, Director of Business Management, en Stephan Kubisch, Director Product Definition, beide bij Trinamic, deze nieuwste oplossingen die de ontwikkelingstijd in verschillende industriële automatiseringstoepassingen.
Het TMCM-1617-GRIP-REF open-source referentieontwerp integreert een hardware field-oriented controller (FOC) en drie communicatiepoorten. Het omvat Maxim Integrated's MAX22000 industriële IC, MAX22515 IO-Link transceiver, een software-configureerbare, zeer nauwkeurige analoge I/O, en de MAX14906, een vierkanaals digitale I/O die wordt gebruikt om de bedrijfsmodus van de single- as servoaandrijving.
De nieuwe TMCM-1321 servocontroller/drivermodule is bedoeld om de prestaties van tweefasige bipolaire stappenmotoren te optimaliseren door de assnelheid en synchronisatie te optimaliseren en vermogensverliezen te verminderen. Maxim Integrated wees erop dat het apparaat een magnetische encoder en digitale ingangen voor optische encoders integreert om de servobesturing te vereenvoudigen met geavanceerde feedback en diagnostiek.
Open-sourceplatform
“Het voordeel van het TMCM-1617-GRIP-REF-referentieontwerp is de mogelijkheid om meerdere circuits op één bord te integreren, dat normaal gesproken over meerdere borden of componenten aan het einde van een robotarm zou worden verdeeld. Deze compacte footprint combineert een vereenvoudigde communicatiebusinterface die de belasting van kabelbomen vermindert en een gestroomlijnde manier biedt om zowel gegevens als stroom over een enkel of dubbel paar draden te verplaatsen, evenals de mogelijkheid om het gereedschap correct in gebruik te nemen. Dit compacte formaat en vereenvoudigde communicatie- en configuratiebusinterface is gekoppeld aan onze TMCL-IDE-softwareontwikkelingsomgeving, waardoor het een zeer veelzijdig referentieontwerp is voor end-of-arm tooling”, aldus DeAngelis. Hij voegde eraan toe:"Naast het compacte formaat, is een andere belangrijke factor die is bereikt, het zeer lichte gewicht van 24 gram voor deze module."
Zoals Proeger beschreef, toont het blokschema van figuur 1 een loadcel om de kracht te detecteren die van de arm of van de grijper of naderingssensor komt. TMCM-1617-GRIP-REF ondersteunt de industriële communicatieprotocollen EtherCAT, IO-Link en RS-485, en biedt een analoog signaal en software programmeerbare digitale in-/uitgangen en kan worden geconfigureerd met behulp van de Trinamic Motion Control Language Integrated Development Environment (TMCL- IDE). “We bieden de mogelijkheid van RS-485-communicatie met 100 megabits per seconde, wat nog steeds populair is. Het voordeel is dat het nog steeds een traditionele hogesnelheidsbekabeling is om aan de eisen van deze toepassing te voldoen. Het is een zeer flexibel product vanuit een communicatieperspectief als een meer traditionele benadering van het besturen van de motor”, aldus Proeger.
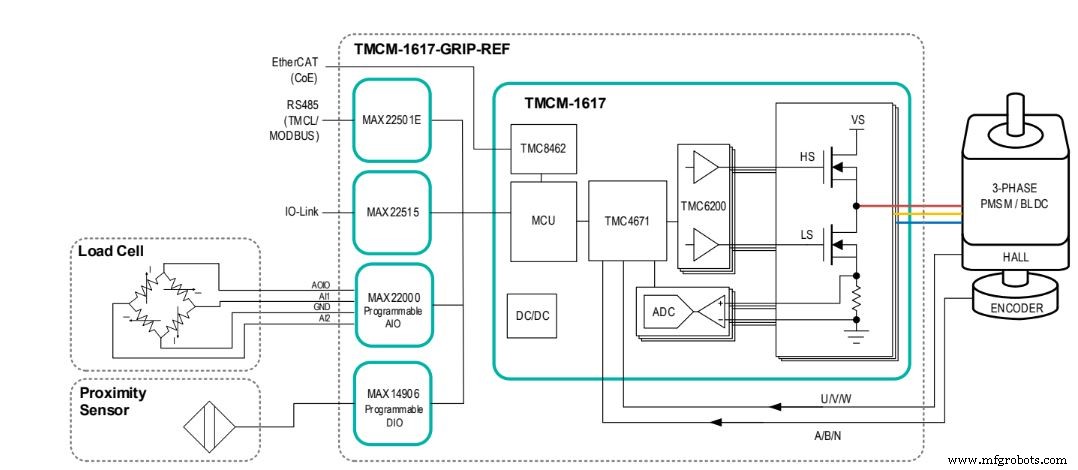
Figuur 1:Blokschema van TMCM-1617-GRIP-REF (Bron:Maxim Integrated)
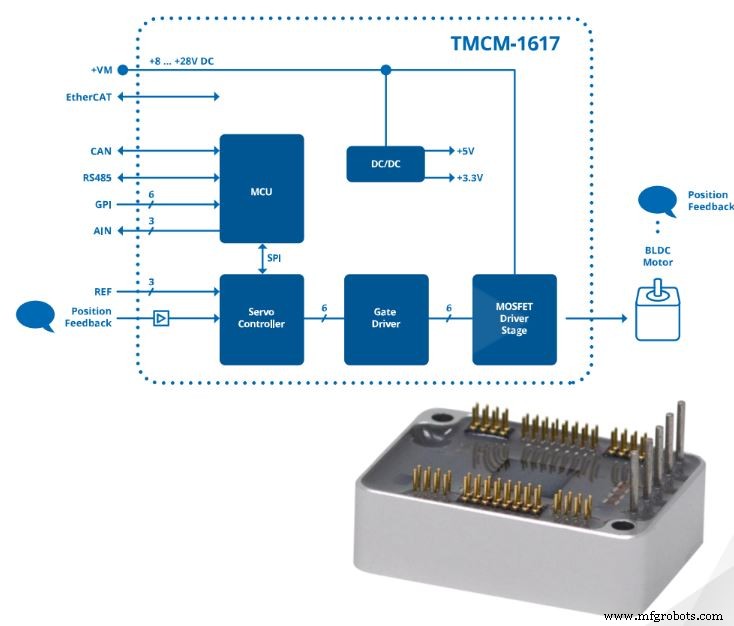
Figuur 2:TMCM-1617 – Kleinste servocontroller (bron:Maxim Integrated)
"We bieden alle benodigde voedingsrails om externe randapparatuur en sensoren te ondersteunen zonder dat er een extra voedingsbron nodig is", aldus Kubisch. Hij voegde eraan toe:"perfecte stroomregeling heeft de grootste impact op de algehele systeemefficiëntie."
Met state-of-the-art busarchitecturen, gecombineerd met geïntegreerde besturing en diagnostiek in één oplossing, gelooft Maxim Integrated dat het referentieontwerp de productiviteit op de fabrieksvloer kan verhogen en kunstmatige intelligentie naar de rand kan brengen. De ingebouwde functies van de MAX22515, zoals uitgebreide geïntegreerde bescherming, zorgen bijvoorbeeld voor robuuste communicatie in ruwe industriële omgevingen. Alle IO-Link-lijninterfacepinnen (V24, C/Q, DI en GND) zijn beveiligd tegen sperspanning, kortsluitvast, hot-plug-beveiligd en hebben een geïntegreerde ±1,2kV/500Ω overspanningsbeveiliging.
Voor de toekomst van motor- en motion control zal de toenemende complexiteit in samenhang met de vraag naar ultieme betrouwbaarheid leiden tot meer slimheid van het systeem – en dat moet aan de rand, decentraal. Beslissingen moeten in realtime worden genomen, gegevens moeten bij de bron worden verzameld en in de cloud worden gedeeld.
Servocontroller/stuurprogramma TMCM-1321
De TMCM-1321 is een eenassige controller/driver voor tweefasige bipolaire stappenmotoren met een geïntegreerde magnetische encoder en digitale ingangen, allemaal met closed-loop besturingslogica om de motorbesturing te optimaliseren.
Maxim Integrated wees erop dat de vormfactor bedoeld is om aanzienlijk kleiner te zijn dan andere oplossingen, en het bord ondersteunt 256x microstepping met de ruisvrije werking. De geïntegreerde magnetische encoder kan worden gebruikt wanneer een geschikte magneet op de motoras is bevestigd, waardoor een gesloten luswerking mogelijk is. Als alternatief kan een optische encoder worden aangesloten via de ABN digitale ingangen. Er kunnen verschillende hellingsvormen worden gekozen. Naast lineaire ramping en Trinamic SixPoint™ ramping, implementeert de TMCM-1321-module een S-vormige ramp die de daadwerkelijke overdrachtstijd kan versnellen.
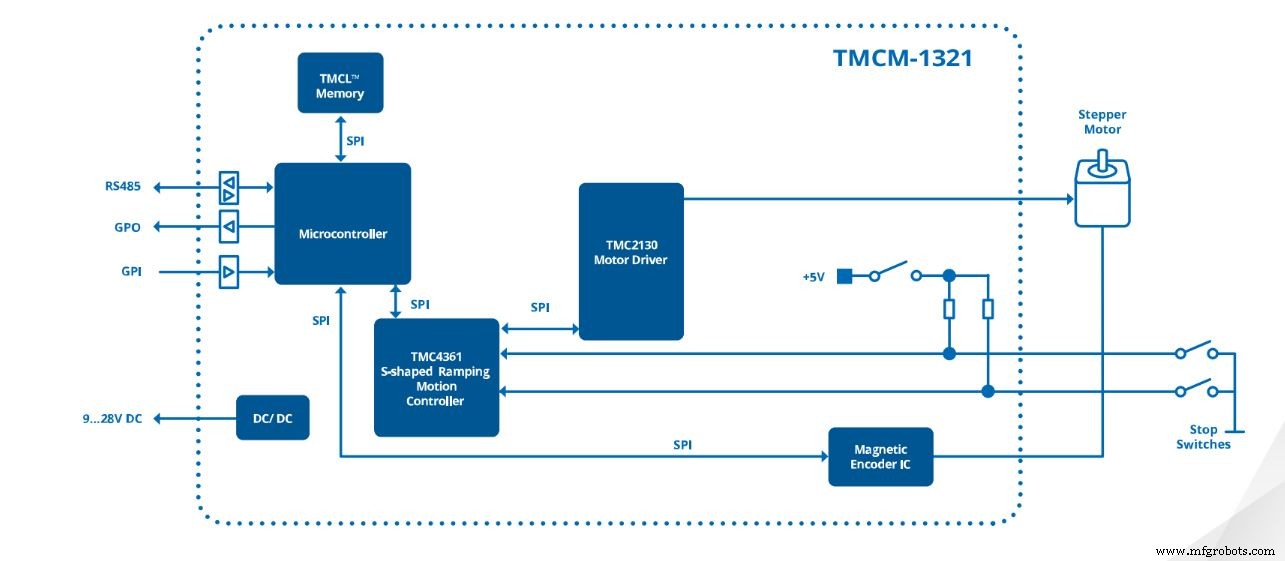
Figuur 3:Blokschema van TMCM-1321 (Bron:Maxim Integrated)

Figuur 4:TMCM-1321 Board (Bron:Maxim Integrated)
De TMCM-1321 is ontworpen voor spoelstromen tot 0,7A RMS en 24V DC voedingsspanning. Drie digitale ingangen kunnen worden gebruikt als ingangen voor eindschakelaars en thuisschakelaars of als ingangen voor algemene doeleinden.
Motorbesturing en aandrijvingen zijn van fundamenteel belang in veel toepassingen, omdat ze een hoge mate van nauwkeurigheid mogelijk maken, wat zich op zijn beurt vertaalt in lagere kosten en grotere efficiëntie. De essentiële functie van een motorbesturingscircuit is ervoor te zorgen dat de rotor, tijdens verschillende bedrijfs- en belastingsomstandigheden, een nauwkeurige positie met betrekking tot de wikkelingen inneemt, om zijn locatie met een voldoende mate van nauwkeurigheid te bepalen.
>> Dit artikel is oorspronkelijk gepubliceerd op onze zustersite, Power Elektronica Nieuws.
Verwante inhoud:
- Motorbesturingen ontwerpen voor robotsystemen
- Robots maken met Ada, deel 2 – De motoren aansturen
- Het oplossen van deterministische ontwerpuitdagingen voor motorbesturing met meerdere assen
- Software vereenvoudigt het ontwerp van de BLDC-motordriver
- Ontwikkelkits bieden platforms voor ontwerpen voor digitale voeding en motorbesturing
- Een snel reagerend feedbacksysteem ontwerpen voor geminiaturiseerde, door een motor aangedreven ontwerpen
Abonneer u voor meer Embedded op de wekelijkse e-mailnieuwsbrief van Embedded.
Ingebed
- Renesas breidt microcontroller-opties voor servobesturing in industriële robots uit
- Front-end module vereenvoudigt wifi 6-ontwerp
- Motorbesturingen ontwerpen voor robotsystemen
- Motorcontroller integreert Arm Cortex-M0 core
- Geïntegreerde drivers vereenvoudigen het ontwerp van de stappenmotor
- Referentieontwerp ondersteunt geheugenintensieve AI-workloads
- Voordelen van industriële controleconvergentie
- Industriële bedieningspanelen begrijpen
- Basisprincipes van het ontwerp van het bedieningspaneel
- Wat is prototypen van industrieel ontwerp?
- Over industriële motoren en toepassingen