


Soorten robotverbindingen:een gedetailleerde gids
Bron:www. idtechex.com
Automatisering in de maakindustrie wint snel aan kracht nu steeds meer bedrijven robotica gaan gebruiken. Dit wordt toegeschreven aan de voordelen van automatisering in het bedrijfsleven en het gebruik van slimmere en intelligentere processen. U krijgt meer productie en vermindert ook het risico op verwondingen in de fabriek. De meeste bedrijven neigen naar het gebruik van robotarmen voor onder meer pick &place, verpakking, schilderen en assemblage.
Als u robotarmen in uw bedrijf opneemt, moet u ervoor zorgen dat u werkt met een fabrikant van hoogwaardige robotarmen die u het beste biedt. Daarnaast is het ook essentieel om een basiskennis te hebben van wat ze inhouden. De robotarm is voorzien van het lichaam, de pols en de eindeffector die specifieke functies hebben. Om deze verschillende onderdelen nauwkeurig te laten werken, moeten er robotgewrichten aanwezig zijn. In dit artikel gaan we dieper in op de verschillende robotgewrichten om je een beter begrip te geven.
Inhoudsopgave
Wat zijn robotgewrichten?
Bron:www. researchgate.net
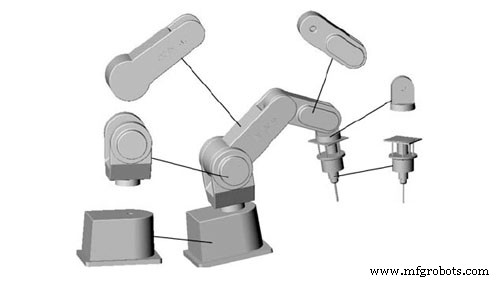
Robotverbindingen verwijzen naar de beweegbare onderdelen van de robot die resulteren in relatieve bewegingen tussen aangrenzende schakels. In deze context worden schakels gebruikt om te verwijzen naar de stijve delen die de verbindingen verbinden voor een duidelijke en adequate werking. Dit toont aan dat de industriële robotarm wordt gekenmerkt door het gebruik van een combinatie van schakels en verbindingen voor optimale functionaliteit. Het is essentieel om ervoor te zorgen dat de verbindingen van uw manipulator dienovereenkomstig werken om ervoor te zorgen dat er precisie en nauwkeurigheid is tijdens een toepassing.
De robotgewrichten worden soms ook wel assen genoemd. Ze zijn essentieel en komen van pas om ervoor te zorgen dat de beweging van de arm niet wordt beperkt of belemmerd. Als u meer te weten komt over de robotgewrichten, kunt u bepalen met welk type robotarm u wilt werken, afhankelijk van de taken die u wilt uitvoeren.
Soorten mechanische verbindingen voor robots
Bron:www. britannica.com
Aangezien er verschillende soorten robots in de maakindustrie worden gebruikt, vindt u ook een verscheidenheid aan mechanische verbindingen. Deze gewrichten verschillen in beweging en ook in toepassing, vooral als het gaat om het type robot dat moet worden gebruikt.
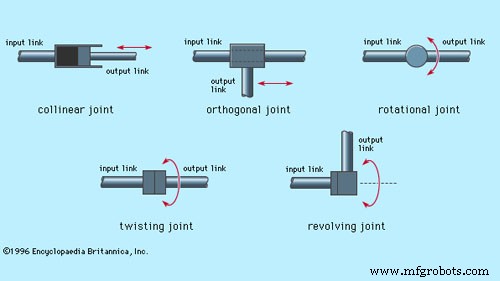
Als het gaat om de mechanische verbindingen in robotarmen, zijn er vijf hoofdtypen waarmee u rekening moet houden. Twee van de verbindingen zijn lineair, wat betekent dat de relatieve beweging tussen de aangrenzende schakels translatie is. Aan de andere kant zijn de andere drie roterend, wat betekent dat de relatieve beweging van de schakels rotaties tussen hen inhoudt. De vijf soorten mechanische verbindingen voor robots zijn:
Lineaire verbindingen
In de lineaire verbindingen is het de bedoeling dat de relatieve beweging die wordt gekenmerkt door de aangrenzende schakels parallel is. Dit betekent dat de input- en outputlinks in een lineaire beweging schuiven. Dit soort beweging resulteert in een translatiebeweging. Dit soort lineaire beweging kan op verschillende manieren worden bereikt, waaronder het gebruik van het telescopische mechanisme en de zuiger. Dit type verbinding wordt ook wel het L-gewricht genoemd.
Orthogonale gewrichten
De orthogonale verbindingen worden in de volksmond ook wel de type O-verbindingen genoemd. Ze hebben een relatieve beweging van de inputlink en outputlink. Dit soort beweging betrokken bij de orthogonale gewrichten is een translatie glijdende beweging. In tegenstelling tot de lineaire verbindingen, staat bij het orthogonale gewricht de uitgangsverbinding echter loodrecht op de invoerverbinding.
Rotatieverbindingen
Als het gaat om de roterende gewrichten, zult u het gebruik van relatieve rotatiebewegingen vinden die handig zijn voor robotmanipulators die meerdere werkruimten bedienen. Deze bewegingen worden uitgevoerd met de rotatie-as loodrecht op de assen van de input- en outputlinks. Deze rotatiegewrichten worden ook wel Type R-gewrichten genoemd.
Gewrichten draaien
Dit type verbinding heeft een roterende beweging die ook resulteert in een zekere mate van rotatie tijdens gebruik. De beweging in deze gewrichten is relatief ten opzichte van de rotatie-as die loodrecht staat op de assen van de input- en outputlinks. De twijnende verbindingen worden ook wel type T verbindingen genoemd.
Draaiende verbindingen
In de draaiende gewrichten is het een beetje anders dan de andere. Deze gewrichten hebben ook een roterende beweging die van pas komt in verschillende toepassingen. De beweging van deze gewrichten kenmerkt beweging tussen de twee schakels. De as van de invoerverbinding is ontworpen om evenwijdig te zijn aan de rotatie-as van het gewricht. Aan de andere kant is de as van de uitgangsverbinding ontworpen om loodrecht op de rotatie-as van het gewricht te staan. Dit type verbinding wordt ook wel type V-verbinding genoemd.
Verschillende soorten robots en de gebruikte mechanische verbindingen

Bron:www. technologyreview.com
Verschillende robots zullen gebruik maken van verschillende soorten mechanische verbindingen. Als u meer te weten komt over de verschillende robots, bent u in een betere positie om te investeren in een robot die voor u werkt. Enkele van de meest voorkomende robots om te overwegen zijn:
Gearticuleerd
Het gelede robotontwerp zal hoogstwaarschijnlijk komen met verschillende reeksen en combinaties van roterende gewrichten. Dit assortiment kan bestaan uit eenvoudige structuren met 2 verbindingen en kan worden verplaatst naar complexere structuren met 10 of meer verbindingen. Bij dit ontwerp is de arm verbonden met de basis met behulp van een draaigewricht, terwijl de schakels in de arm zijn verbonden door draaigewrichten.
Cartesiaans
Bij de cartesiaanse robots wordt in het ontwerp gebruik gemaakt van drie lineaire verbindingen. Deze gewrichten bevinden zich op het cartesiaanse vlak waarbij X, Y en Z betrokken zijn. Deze robots kunnen ook een bevestigde pols hebben met gemakkelijker roterende gewrichten voor beweging. Dit specifieke soort robot wordt ook wel rechtlijnig of portaal genoemd.
Cilindrisch
De cilindrische robot heeft een roterende verbinding die aan de basis is bevestigd en een lineaire verbinding die wordt gebruikt om de verschillende schakels met elkaar te verbinden. Aangezien cilindrische robots werken binnen een cilindrisch werkbereik, zijn de roterende en lineaire beweging handig om ervoor te zorgen dat precisie wordt bereikt.
Polar
In het polaire ontwerp van robots is de arm met een draaischarnier verbonden met de basis. Soms vindt u ook het gebruik van een combinatie van twee roterende verbindingen en één lineaire verbinding. Aangezien deze robot ook wel bolvormige robot wordt genoemd, zal het te uiten werkbereik ook bolvormig zijn. De assen die in deze robot worden gebruikt, vormen een polair coördinatensysteem waarmee de manipulator gemakkelijk kan werken.
SCARA
De SCARA-robot is een populaire optie bij veel fabrikanten, vooral degenen die hun assemblageprocessen willen automatiseren. Deze robot is meestal cilindrisch en werkt in een relatief cilindrisch werkbereik. Het kenmerkt het gebruik van twee parallelle verbindingen die handig zijn in het montageproces. Deze verbindingen zorgen voor compliantie in één geselecteerd vlak terwijl de robot in gebruik is.
Delta
De delta-robots zijn ontworpen met een spinachtige constructie waarmee ze geweldige services aan hun gebruikers kunnen bieden. Ze zijn opgebouwd uit parallellogrammen die zijn verbonden en verbonden met een gemeenschappelijke basis. De gewrichten van dit type robot zijn zowel roterend als lineair. Hierdoor kan de robot een enkel uiteinde van de arm in een koepelvormig werkgebied verplaatsen. Het verbetert zijn prestaties om ervoor te zorgen dat de ontwikkeling van verschillende taken nauwkeurig wordt uitgevoerd.
Conclusie
Wanneer u met robotica werkt als middel om verschillende processen in uw bedrijf te automatiseren, moet u rekening houden met de verschillende aspecten. Deze aspecten spelen een grote rol bij de prestaties van de specifieke robotica die u wilt gebruiken. Als het gaat om het gebruik van industriële robotarmen, moeten de robotgewrichten iets zijn om op de hoogte te blijven.
Maak kennis met de verschillende gewrichten en hoe deze de prestaties van de robot beïnvloeden. Dit zal u helpen om het soort verbindingen te meten dat het meest geschikt is voor de activiteiten die u wilt automatiseren. Als je dat eenmaal hebt, kun je investeren in robotarmen die worden geleverd met de gewrichten waarvoor je op de markt bent. Neem de tijd en werk samen met fabrikanten van automatiseringsapparatuur die u zullen helpen.
Industriële robot
- C++-gegevenstypen
- C Gegevenstypen
- t is SFM in bewerking?
- Top 10 fabrikanten van industriële robots in 2020
- Industriële robots - de ultieme gids
- Robotica in de automobielindustrie
- Robot Warehouse-systeem:wat het is en hoe het wordt gebruikt
- Robotgrijper:wat het is en hoe het wordt gebruikt voor robots
- Wat zijn de voordelen van robotarmen voor mensen?
- Robotvisie:een gids die elke fabrikant zou moeten kennen
- Industriële automatie