


Trillingsanalyse gebruiken om apparatuurproblemen te identificeren
Veel van de huidige trillingsgegevensverzamelaars hebben de mogelijkheid om twee of meer sensoren te ondersteunen die tegelijkertijd gegevens verzamelen. Met deze mogelijkheid is het mogelijk om de cross-channelfase als analysetool te selecteren.
Afgezien van de analysator en kabel met een sensor die worden gebruikt voor normale trillingsroutes, is het enige extra hulpmiddel dat nodig is om de kanaaloverschrijdende fase uit te voeren een andere kabel en sensor. Cross-channel fase-analyse kan de ontdekking van bronnen van structurele losheid, sommige structurele integriteitsproblemen, verkeerde uitlijningsomstandigheden en zelfs structurele resonantiecondities mogelijk maken.
Hoe werkt het?
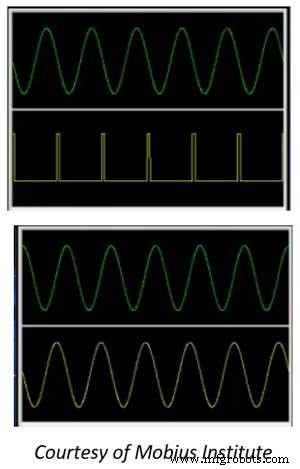
Normale route data-acquisitie legt meerdere sinusgolven vast en scheidt ze volgens frequentie. Vervolgens worden ze weergegeven als afzonderlijke frequenties met hun individuele amplituden in spectraal formaat.
Faseanalyse kiest een enkele sinusgolf (enkele frequentie) en detecteert hoe die trillingsbron beweegt ten opzichte van iets anders. Het "iets anders" kan een plek op de as zijn, zoals reflecterende tape of een key phaser, of een ander trillingssignaal zoals in het geval van cross-channel fase.
Er zijn dus twee signalen die worden vergeleken:het trillingssignaal en een toerentellerpuls die wordt geactiveerd door het passeren van de reflecterende tape, of een puls van bijvoorbeeld een key phaser. Een toerentellerpuls creëert een blokgolf, terwijl het trillingssignaal een sinusgolf uitzendt.
De pieken van de twee bronnen worden vergeleken voor timing, en het tijdsverschil tussen de twee pieken wordt weergegeven in graden, aangezien beide bronnen gerelateerd zijn aan roterende beweging. Dit werkt perfect voor het balanceren van roterende apparatuur, omdat door de puls van de voorrand van de reflecterende tape, de trillingspiek (of hoge plek) zoveel graden later optreedt, wat de waarschijnlijke zware plek op de as aangeeft. (Dit artikel gaat niet in op omstandigheden die ervoor kunnen zorgen dat de zware plek verschilt van de hoge trillingsplek. Houd er rekening mee dat dit het geval kan zijn.)
Met twee sensoren die in cross-channelfase worden gebruikt, is de vergelijking de piek van de trilling van elk signaal. Met analyzers die cross-channel fase kunnen uitvoeren, kunt u ook de specifieke te bewaken frequentie specificeren. Meestal wordt de as-draaisnelheid geselecteerd als de frequentie van belang.
Een typisch startpunt is om sensor A aan het buitenste verticale uiteinde van de motor en sensor B op de motorvoet te plaatsen om te zien hoe die punten ten opzichte van elkaar bewegen. Het is gebruikelijk om één sensor op dezelfde plaats te houden, d.w.z. positie A om te vergelijken met verschillende andere punten. Voor de volgende voorbeelden gaan we ervan uit dat sensor A nul graden aangeeft.
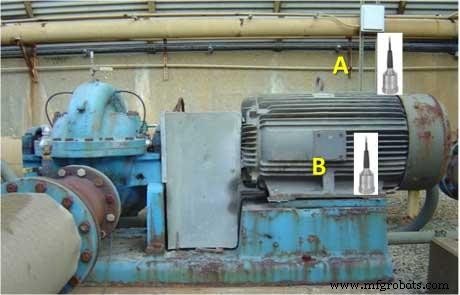
Als sensor B nul graden aangeeft (+- 30 graden), dan bewegen ze samen of in harmonie, wat een normale toestand is die wordt verwacht. Als sensor B echter 180 graden is (altijd +- 30 graden), dan beweegt hij in de tegenovergestelde richting of uit de pas. Dit betekent dat een deel van het motorhuis in opwaartse richting beweegt terwijl de voet in neerwaartse richting beweegt. Dit wordt veroorzaakt door een barst in het motorhuis ergens, waardoor onderdelen uit elkaar kunnen vallen. Meestal bevindt de scheur zich aan of nabij de voet. Documenteer uw bevindingen.
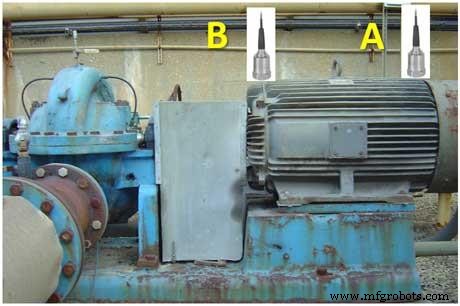
Verplaats nu sensor B naar de voetbout. Als sensor B nul graden aangeeft, beweegt de plaat waaraan de bout is bevestigd samen met de bovenkant van de motor, wat wordt geïnterpreteerd als een vastzittende bout.
Als de voet echter nul graden is en de bout 180 graden (of 180 graden uit fase), is er speling tussen de voet en de montageplaat.
Hetzelfde proces kan worden bepaald voor de basis en de vloer. Als deze allemaal hetzelfde lezen als sensor A, is er geen speling tussen twee van deze locaties.
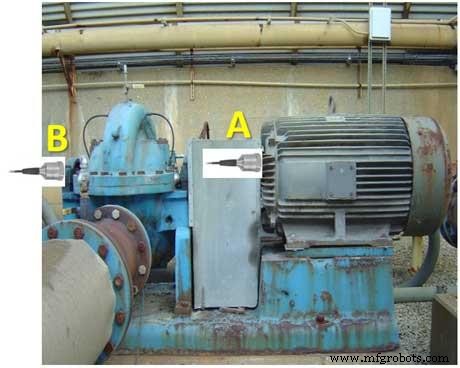
Verplaats vervolgens sensor A naar de binnenboordpositie van de motor en voer dezelfde controles uit aan dat uiteinde van de motor. Zodra dat is voltooid, verplaatst u sensor A over de koppeling naar het binnenboordzijde van de pomp en vervolgens naar de buitenboordmotor van de pomp en voert u daar controles uit. Zorg ervoor dat u uw bevindingen op elke positie documenteert voor latere referentie en analyse indien nodig.
De volgende stap is om de metingen langs de machinetrein van het ene uiteinde naar het andere te vergelijken. Dit moet zowel in de verticale sensorrichting als in de horizontale sensorrichting gebeuren. Sommige vragen rijzen over waarom beide richtingen. Dat kan worden beantwoord met een andere vraag:"Is het mogelijk dat een machine verticaal is uitgelijnd, maar niet horizontaal?"
Laten we eens kijken naar scenario's waarbij sensor B in verticale richting van peiling naar peiling beweegt langs de machinetrein.
Nogmaals, neem aan dat sensor A stationair is en nul graden afleest voor al deze metingen, zwerf met sensor B. De eerste B-positie is verticaal binnenboord van de motor. Als sensor B nul graden is, dan is deze positie zonder problemen zoals het hoort. Als sensor B echter 180 graden aangeeft, beweegt dit uiteinde van de motor naar beneden terwijl het A-uiteinde omhoog beweegt. Dit is geen goede staat. Een voorwaarde die deze hoekafwijking kan veroorzaken.
Verplaats sensor B naar de binnenboordpositie van de pomp om te controleren of de hoek niet goed is uitgelijnd. Als het daar 180 graden aangeeft, is het zeer waarschijnlijk een verkeerde hoekuitlijning, omdat bij een hoekafwijking de assen gelijktijdig over de koppeling bewegen. Neem aan dat we voor dit voorbeeld de indicaties hebben van een verkeerde hoekuitlijning. Wat zal het buitenboordlager van de pomp naar verwachting aflezen?
Door sensor B naar de buitenboordlagerlocatie van de pomp te verplaatsen, verwachten we dat de aflezing nul is om de hoekafwijking te bevestigen. Als er geen sprake is van een verkeerde uitlijning, verwachten we dat alle lagers in fase zijn of nul aflezen.
Dezelfde controles kunnen in horizontale richting worden uitgevoerd door de referentiesensor, sensor A, in de horizontale richting van de buitenboordmotor te plaatsen. Voer de vergelijkingen uit, documenteer alle metingen en verplaats sensor B van lager naar lager in horizontale richting aan dezelfde kant van de machine. Wat gebeurt er als de sensor aan de andere kant van de machine wordt geplaatst?
Welke nuttige informatie zouden fasemetingen in axiale richting bieden? Laten we eens kijken naar de mogelijkheden. Plaats sensor A in axiale richting op het binnenboordlager van de motor en sensor B op de buitenboordpositie van de pomp in axiale richting, en vergelijk de fase-aflezingen. Als ze in fase zijn, is dit zoals verwacht. Als ze echter 180 graden uit fase zijn, wijst dat op een verkeerde hoekuitlijning waarbij de assen tegen elkaar duwen terwijl ze draaien. Net als bij normale trillingsmetingen, kunnen axiale fasemetingen worden gebruikt om een verkeerde uitlijning te bevestigen.
Een vergelijkbare methode voor het vergelijken van faseaflezingen kan worden gebruikt om de structurele staat van de machinebasis te controleren om te zien hoe deze beweegt. Doorgaans wordt sensor A in verticale richting op het buitenboordlager van de motor gemonteerd en wordt sensor B gebruikt om langs de basis te zwerven.
Beginnend aan het motoruiteinde van de basis, bevindt sensor B zich in de buurt van de voorste hoek van de basis. De fase-uitlezing zal waarschijnlijk in fase zijn met sensor A als alle verticale metingen op die locatie in fase waren. Verplaats nu sensor B langs de voorkant van de basis in de buurt van de rand in stappen van 2 of 3 inch en registreer de fase-uitlezingen. Als ze allemaal in fase zijn, is er geen buigprobleem.
Verplaats vervolgens sensor B naar de achterkant van de machine en herhaal de metingen daar langs de basis. Nogmaals, als alles in fase is, is er geen probleem met het buigen van de basis.
Maar wat gebeurt er als er over de lengte een faseverschuiving van 90 graden of 180 graden is in het gebied tussen de motor en de pomp? Er kan een faseverschuiving van 180 graden zijn of een faseverschuiving van 360 graden tussen het ene uiteinde van de basis en het andere uiteinde. Waar zou dit op kunnen duiden?
Wat zou er worden aangegeven als er een faseverschuiving van 180 graden is van een meting langs de voorkant naar een overeenkomstige positie langs de achterkant? Zou het een probleem zijn? Waarom wel of niet?
Hoe zit het met de amplitude?
Fase-uitlezingen hebben meestal twee componenten die beschikbaar zijn. Een daarvan is de feitelijke fase-uitlezing met een frequentie in graden, die hier is geïntroduceerd. De andere component is de trillingsamplitude. In sommige analysatoren wordt de selectie voor het instellen van fase-uitlezingen piek en fase genoemd, de piekamplitude van trillingen en de fase-uitlezing. De fase-aflezing geeft de richting aan waarin het beweegt, maar de amplitude geeft aan hoeveel het beweegt.
In de onderstaande afbeelding zijn er cirkels langs de basis met een vinkje aan de buitenkant van de cirkel. Het tic-teken geeft de faserichting aan. Binnen de cirkel bevinden zich trillingswaarden in snelheid, de typische trillingswaarde voor die frequentie. Merk op dat vanaf links de trillingsamplitude 0,114 inch per seconde is. Naarmate het vordert naar het midden van de grondplaat, stijgt de amplitude tot ongeveer 0,954 inch per seconde. De amplitude neemt weer af naarmate deze naar rechts beweegt. De fase blijft de hele afstand constant. Is er een probleem?

Ja, dit wijst op een probleem met de basisstijfheid waardoor het meer in het midden kan bewegen. Is het gevoegd zoals het is ontworpen? Vraag een ingenieur om een manier te ontwerpen om de basis te verstevigen die geen nadelige invloed heeft op andere gebieden.
Er zijn mensen die zouden zeggen dat de verhoogde vibratie in het gebied aangeeft dat het in een resonerende toestand is. Elke keer dat er resonantiecondities of natuurlijke frequenties in het spel zijn, is er echter een faseverandering. Met in wezen nul faseverandering is de resonantie uitgesloten.
Samenvatting
De cross-channelfase is een waardevol hulpmiddel dat in de meeste tweekanaals-analyzers is ingebouwd en waarmee de technicus/analist bepaalde machineproblemen kan vinden of verifiëren. Een goed begrip van hoe de machine moet bewegen, is zeer nuttig bij het diagnosticeren/bevestigen van de omstandigheden.
Onderhoud en reparatie van apparatuur
- Een apparatuurregister bijhouden
- Totaal productief onderhoud implementeren
- Wanneer en hoe een brandblusser te gebruiken
- Effectief gebruik van een verfspuit
- Gereedschapssensor van Wood Cnc-router, hoe te gebruiken?
- Hoe het energieverbruik in de productie te verminderen?
- Waarom is trillingsanalyse essentieel voor uw bedrijf?
- Gepland preventief onderhoud (PPM) uitvoeren
- Hoe luchtfilters voor zware apparatuur werken
- Hoe een brandstoffilter voor zware apparatuur werkt
- Hoe bouwmaterieel veilig te vervoeren