


Bedien Dual Axis FPV Camera Cradle met Joystick-module
Componenten en benodigdheden
 |
| × | 1 | |||
| |
| × | 2 |
Over dit project
Hallo allemaal,
Vandaag gaan we de volledige tutorial bekijken over het besturen van de 2-assige FPV-camerahouder met joystickmodule, de camerahouder wordt geleverd in een klein pakket met enkele acrylsteunen en -stukken, enkele schroeven en twee servomotoren.
Vereiste:Dus voordat u verder gaat, als u niet bekend bent met de joystick, noch de servomotoren, zijn hier twee tutorials voor u:
- Hoe de Joystick-module eenvoudig met het Arduino-bord te verbinden
- Gebruik servomotoren met Arduino
Dus hier zullen we twee methoden gebruiken om de servo's te besturen:de eerste waarbij de servo's de positie van de joystick volgen en ze bewegen terwijl we onze stick bewegen, de tweede de servo's beginnen te bewegen in de richting waar de joystick naar wijst en ze blijven daar totdat we de stick opnieuw bewegen of van richting veranderen.
Dit is een demo van wat we aan het eind zullen hebben:
In de instructievideo ging ik stap voor stap tijdens het bedraden of kalibreren, ook stap voor stap tijdens het coderen, maar hier zal ik je de hele bedrading geven, wat geen probleem is omdat geen enkele module of servo de anderen beïnvloedt.
Om niet in de war te raken door de joystick-as die mijn joystick heeft (X-as bovenaan dan Y-as) hier op de afbeelding zijn ze omgekeerd en anders genoemd, maar ik laat de bedrading zoals ik gebruikte, je kunt deze veranderen zoals je wilt (servo-pinnen, joystick ingangen, richtingen …)
Dus niet om je te verwarren, want ik heb eigenlijk veel codes in de video gebruikt, maar ze zijn erg basic (servo positionering, lezen van analoge waarde van joystick...) Ik heb dit gedaan voordat je mijn andere tutorials kunt bekijken, dus hier Ik heb alleen de twee codes geüpload voor de twee definitieve versies zoals te zien in de video.
Als je hier iets over nodig hebt, kun je contact met me opnemen.
Code
- Code 1 zoals in video
- Code 2 zoals in video
Code 1 zoals in videoArduino
//Deze code is te gebruiken met een fpv-camerahouder met twee assen die twee servo's gebruikt en een joystickmodule toevoegt//we regelen de positie van de houder door de analoge stick te bewegen, de houder volgt de bewegingen van de joystick//Zie surtrtech.com voor meer informatie#include//Servos-bibliotheek en declaratieServo myservo1;Servo myservo2;int YAxis =1; // Verklaren waar de X-as en Y-as van de joystickpinnen zijn bedraad XAxis =0; // Natuurlijk analoge inputsvoid setup () {Serial.begin (9600); // De bauderate van de seriële monitor instellen en pinMode (XAxis, INPUT) starten; //Het declareren van de pin-modi en servo-pinnen myservo1.attach (8); pinMode (YAxis, INPUT); myservo2.attach(9);}void loop() {int X=analogRead(XAxis); // Lezen van de X-as potentiometer X=X*0.1756; // Het bereik van de potentiometer converteren van 0-1023 naar 0-180 limieten van de servo, je kunt ze veranderen als je een 360 ° servo's X =180-X hebt;// Dit wordt gebruikt zodat de servo anders naar de exacte positie draait het wordt omgekeerd myservo1.write(X); //Na aanpassing injecteren we die waarde in de eerste servo int Y=analogRead(YAxis);//Lezen van de Y-as potentiometer Y=Y*0.1466; //Hier hebben we een conversie gedaan die past bij de servo-limieten, dus gingen we van 0-1023 naar 0-150 myservo2.write(Y);//En we injecteren onze servo}
Code 2 zoals in videoArduino
//Deze code is om te gebruiken met een fpv-camerahouder met twee assen die twee servo's gebruikt, een joystickmodule toevoegend//We regelen de positie van de houder door de analoge stick te bewegen, de houder beweegt in de richting waar de stick is wijzend//tot de limieten en daar blijven//Raadpleeg surtrtech.com voor meer informatie#include//Servos-bibliotheek en declaratieServo myservo1;Servo myservo2;int a,b,X,Y; // Variabelen nodig laterint YAxis =1; // Verklaren waar de X-as en Y-as van de joystickpinnen zijn bedraad XAxis =0; // Natuurlijk analoge inputsvoid setup () {Serial.begin (9600); // De bauderate van de seriële monitor instellen en pinMode (XAxis, INPUT) starten; //Het declareren van de pin-modi en servo-pinnen myservo1.attach (8); pinMode (YAxis, INPUT); myservo2.attach(9);}void loop() { a=myservo1.read(); // Het lezen van de vorige servoposities is een belangrijke stap, zodat we kunnen weten waar ze de volgende moeten plaatsen b=myservo2.read(); X=analogRead(XAxis);//Lezen van de joystickwaarden Y=analogRead(YAxis); if(X>550){ //Hier hebben we geen kalibratie gedaan, dus de joystick heeft drie standen (Links|Rustend|Rechts) a=a-1; //het hangt af van de waarde die we lezen, we kunnen weten in welke richting de stick wijst en ik verliet de rustpositie groot, eigenlijk is het maar 1 waarde myservo1.write(a); // we injecteren de nieuwe waarde delay (50); //Je kunt de vertraging groot of kort maken of handelen op a=a-x om grote stappen of korte stappen te maken } if(X<450){ a=a+1; //Hier hebben we de tegenovergestelde operatie gedaan om naar de tegenovergestelde richting te gaan myservo1.write(a); vertraging (50); } if(Y>600){ //Hier hebben we geen kalibratie gedaan, dus de joystick heeft drie standen (Omhoog|Rustend|Omlaag) idem b=b+1; mijnservo2.write(b); vertraging (50); } if(Y<450){ b=b-1; mijnservo2.write(b); vertraging (50); }
Schema's
Er is een bovenste servo en een onderste servo, verwar ze niet!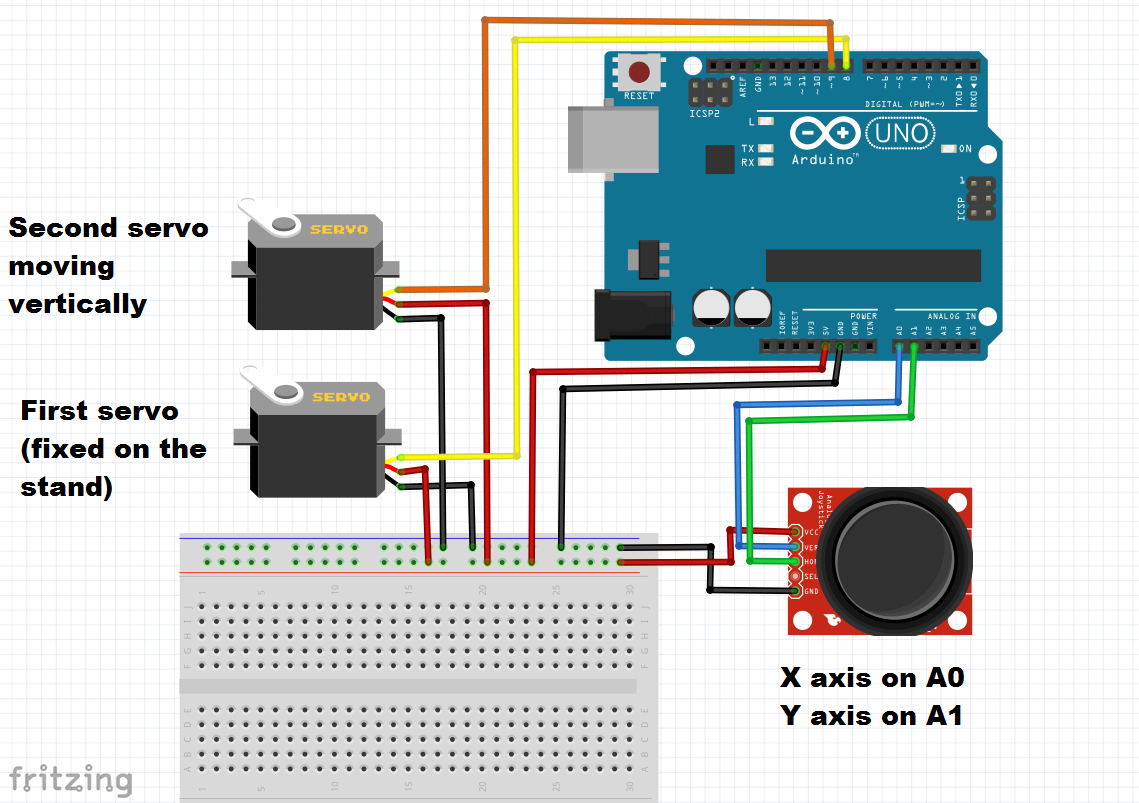
Productieproces
- Toegangscontrole met QR, RFID en temperatuurverificatie
- Framboos met camera in vogelhuisje
- Discord Beveiligingscamera met een ESP32
- Desinfecterende robot met ultraviolet licht
- Bedien muntvangers met Arduino
- Tv-afstandsbediening op batterijen met 3D-geprint hoesje
- Obstakels vermijden robot met servomotor
- Arduino met Bluetooth om een LED te bedienen!
- Arduino Nano:bedien 2 stappenmotoren met joystick
- Draaibank Met CNC
- Slant-Bed draaibank Functies Controle met verificatie graphics