


Bewateringssysteem voor planten voor thuis
Componenten en benodigdheden
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 7 | |||
| × | 8 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 3 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Benodigde gereedschappen en machines
 |
|
Apps en online services
 |
|
Over dit project
Nog een plantenwaterer
Er zijn veel bekende projecten en tutorials op internet die beschrijven hoe de bodemvochtsensoren moeten worden gebruikt. In dit project worden enkele briljante ideeën die op internet zijn gevonden, gecombineerd en gerealiseerd met het softwaregedeelte om de controller voor het bewateringssysteem voor thuisplanten te bouwen. Soms lijkt de oplossing voor de hand liggend totdat je een beetje dichtbij komt om de duivel in de details te zien. Dus laten we deze details onderzoeken.
Belangrijkste kenmerken van de controller
Deze controller heeft de volgende kenmerken:
- Twee planten worden ondersteund, de controller heeft twee onafhankelijke kanalen; elk kanaal kan worden uitgeschakeld
- Elk kanaal heeft twee algemene parameters:hoe lang het water vooruit en achteruit moet worden gepompt. Deze parameters worden gemeten in tientallen van de seconde.
- De controller heeft een handmatige modus. Het is mogelijk om de plant water te geven door op de knop te drukken.
- De controller controleert de luchtvochtigheid na het bewateren van de plant. Het schakelt het kanaal uit voor het geval de luchtvochtigheid niet zou toenemen.
- De controller implementeert de lichtsensor om 's nachts te voorkomen
- De controller heeft een menusysteem om configuratieparameters in te stellen. Configuratie wordt opgeslagen in de EEPROM.
Het bodemvocht
Hoe het bodemvocht nauwkeurig meten? Je kunt de sensor op eBay bestellen, in de plant plaatsen en de weerstand controleren. Deze manier wordt beschreven in veel tutorials op internet. Helaas waren in mijn geval de weerstanden van "droge" en "natte" planten zo dichtbij (300 kOhm en 500 kOhm) dat het moeilijk is om nauwkeurig te beslissen wanneer we wat water aan onze plant moeten toevoegen. Het probleem is dat het schone water de elektriciteit niet geleidt, maar de mineralen in het water wel. De gemeten weerstand hangt dus enorm af van de hoeveelheid en het type mineralen in onze plant, niet van de hoeveelheid water die we erop hebben aangebracht. Google kan helpen. Op internet heb ik een briljant idee gevonden om de capaciteit van de sensor te meten, niet de weerstand. Het belangrijkste idee is dat het water een grote diëlektrische permittiviteit heeft en dat de capaciteit van de "natte" installatie veel groter is dan de "droge" (200 mkF versus 200 pF), een miljoen keer verschil!
Hoe de capaciteit te meten?
Een ander geniaal volk heeft de arduino omgezet in een zeer nauwkeurige condensatormeter. Maar naar mijn mening is deze methode ingewikkeld en is het niet nodig om de capaciteit van onze sensor zo nauwkeurig te meten. Een andere manier om de capaciteit te meten is veel eenvoudiger en gebruikt slechts twee analoge pinnen en geeft de acceptabele nauwkeurigheid om onderscheid te maken tussen "droge" en "natte" omstandigheden van onze fabriek. Zoals ik hierboven vermeld, hebben de metingen van de "droge" en "natte" plant een groot verschil, het is niet handig om deze waarde te gebruiken om een limiet in te stellen, dus de natuurlijke logaritme van de capaciteitsmetingen van de sensor wordt gebruikt in de code, om het interval van mogelijke waarden te verkleinen.
Waarom H-brug?
Het leek een goed idee om de enkele MOSFET-transistor te gebruiken om de waterpomp te laten draaien. Helaas kan het waterniveau in de waterbrontank (fles) hoger zijn dan in onze fabriek. In zo'n geval beginnen we het water te pompen, maar het blijft doorgaan nadat de pomp is gestopt. Hoe het water zeker te stoppen? U kunt de pomp een tijdje in omgekeerde richting laten draaien. Omdat we de gelijkstroommotor gebruiken is het voldoende om de polen ("+" en "-") om te draaien. Hiervoor moet u de H-brug gebruiken. De L298n IC is een goede keuze. De pompen in dit project gebruiken 9 V en 3 A, dus je hebt ook het koellichaam op het IC en de vermogensweerstand nodig. In deze controller wordt de vermogensweerstand van 1 Ohm 5Watt gebruikt. De motor H-bridge L298n is geschikt om twee motoren aan te sturen, deze controller kan dus twee installaties tegelijk aansturen.
Het menusysteem van de controller
Voor het beheer van de plantcontroller wordt de roterende encoder gebruikt. Nadat de controller is gestart, verschijnt het hoofdscherm. Op het hoofdscherm worden enkele nuttige parameters weergegeven. De huidige sensormetingen van beide kanalen van de controller (in de bovenste regel). Als het kanaal is uitgeschakeld, teken dan "xxxx " weergegeven. Op de onderste regel worden de drooglimieten weergegeven.

Om de pomp handmatig te laten draaien, drukt u kort op de draaiknop. Het handmatige scherm verschijnt. Om de controllerparameters in te stellen, drukt u lang op de encoder (ongeveer 1 seconde) in het hoofdscherm. Het setup-menu drie wordt hier beschreven:
- Linker kanaal
- Rechter kanaal
- Helderheid achtergrondverlichting weergeven (of automatisch)
- Geef de helderheid van de achtergrondverlichting 's nachts weer
Elk kanaal heeft een eigen menu:
- kanaal inschakelen
- drooglimiet
- looptijd voorwaarts pompen (tientallen seconden)
- achteruit pompen (tientallen seconden)
- testparameters
"Droge limiet" wordt gebruikt om de minimale bodemvochtigheid van de plant in te stellen om de watergift te starten. De waarde is een natuurlijke logaritme van de sensorcapaciteit. De huidige waarden van de sensormetingen kunnen samen met de droge grenswaarden op het hoofdscherm worden gevonden.
Het menu-item "testparameters" maakt het mogelijk om te controleren hoe de waterer zal werken om de tijdwaarden af te stemmen voordat ze worden opgeslagen in de EEPROM.
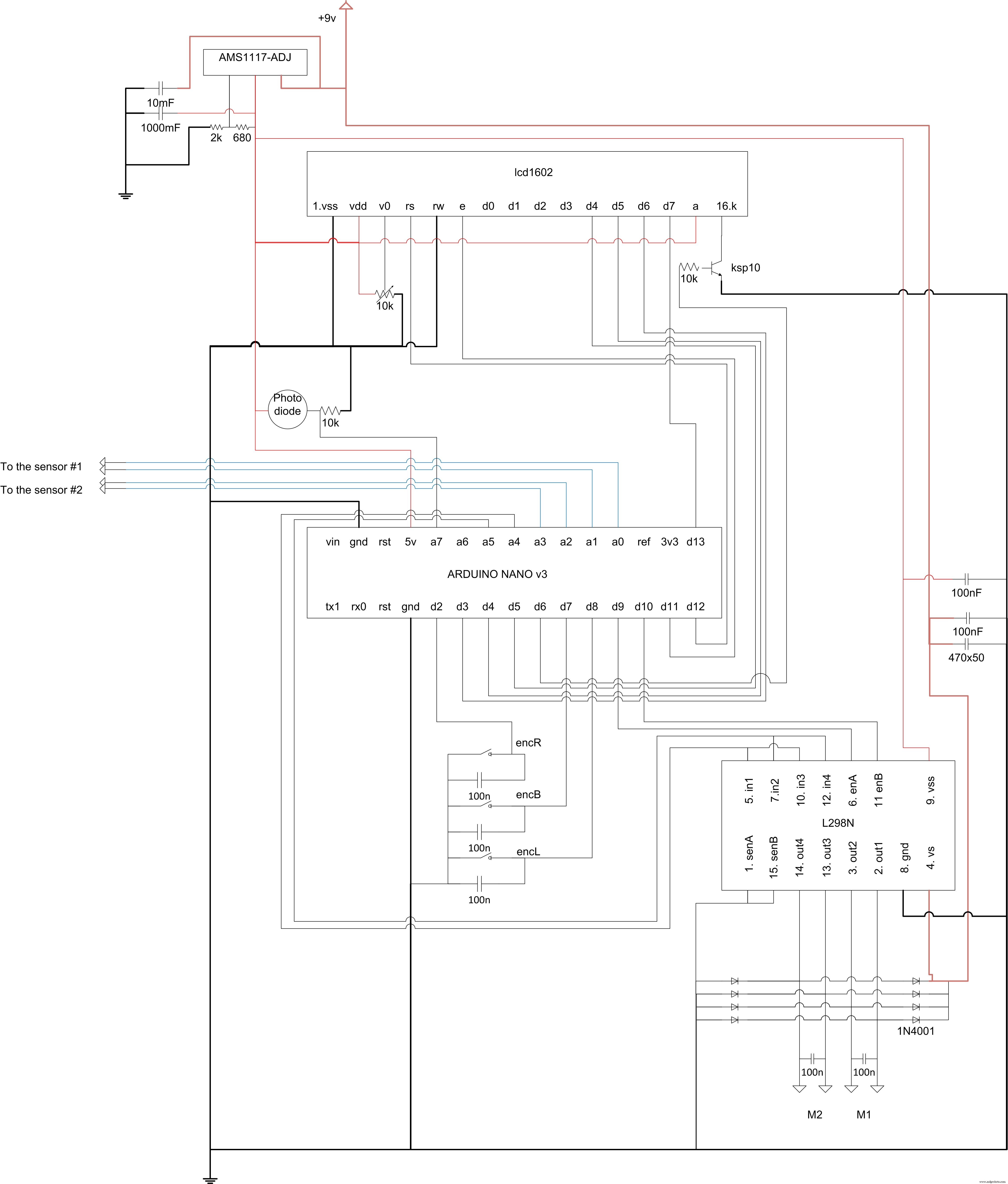
De hardware
De controller is gebouwd op twee dubbelzijdige printplaten van 3x7 cm. De eerste wordt gebruikt voor de l298n-motoraandrijving, de diodes, schroefklemmenblokken om stroom en motorpompen aan te sluiten, de connectoren voor de sensoren. Dit bord heeft ook een DC-voedingsmodule AMS1117-adj om 5v te krijgen voor l298n en Arduino. Het was handig om een aparte spanningsregelaar te gebruiken tijdens het debuggen van dit deel van de controller. Je kunt de regelaar op het Arduino-bord gebruiken om gestabiliseerde 5v te krijgen.
De tweede PCB bevat de Arduino nano, connectoren voor roterende encoder en fotoweerstand en socket voor LCD-display.
Code
Bewateringssysteem
Broncodehttps://github.com/sfrwmaker/WateringSystem/blob/master/WateringSystem.inoSchema's
Productieproces
- Raspberry Pi geautomatiseerde bewatering van planten met website
- Home/Hotel Monitoring System met geautomatiseerde controles
- Dorstalarm plantalarm
- DIY Gevoelige ADXL335 Aardbevingsdetector
- Automatisch plantenwatersysteem met Arduino
- Plantbewakingssysteem met AWS IoT
- Arduino Home Controller geactiveerd door Alexa
- Windows 10 IoT-installatiebewakingssysteem
- Eenvoudig en slim luchtzuiveringssysteem
- Zonnestelsel dat de zon volgt
- Arduino-gebaseerd beveiligingssysteem