


Aanpak maakt onbemande agenten zelfvoorzienend
Onderzoekers hebben een aanpak ontwikkeld waarmee een onbemand luchtvoertuig (UAV) met roterende vleugels op een bewegend onbemand grondvoertuig (UGV) kan landen zonder de hulp van GPS en kan worden opgeladen voordat het verder gaat. Teams van autonome lucht- en grondagenten zullen operaties mogelijk maken in zoek- en reddingsomgevingen die te afgelegen of te gevaarlijk zijn voor mensen, maar die vaak een uitgebreide positionerings- en communicatie-infrastructuur vereisen.
Een cruciale functie van UAV's is om autonoom te landen op statische en bewegende grondvoertuigen, op te laden en vervolgens op te stijgen om nieuwe missies uit te voeren. UAV's kunnen niet op GPS vertrouwen, omdat het gemakkelijk wordt verstoord, dus dit gedrag moet worden uitgevoerd met behulp van andere bronnen, zoals zicht aan boord.
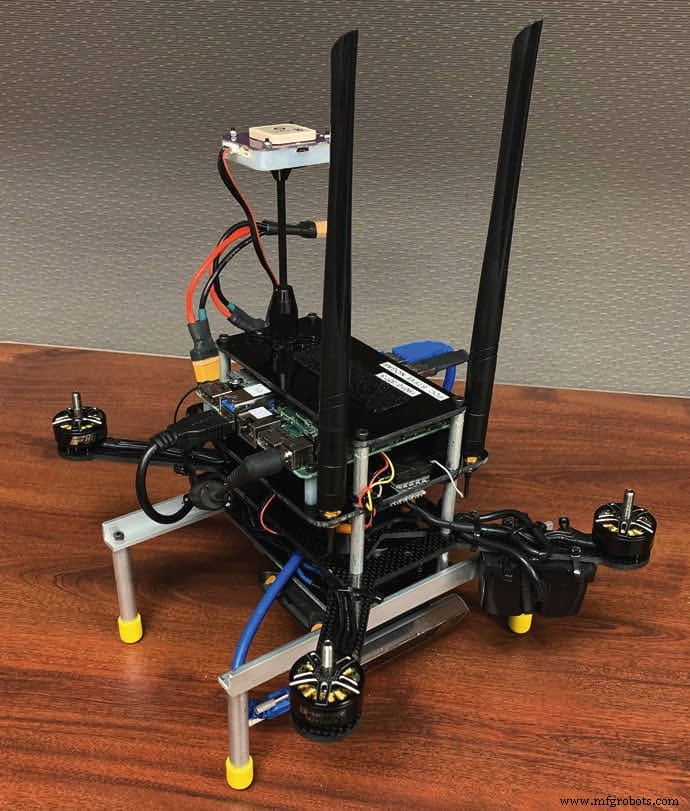
Onderzoekers voerden berekeningen uit aan boord van het voertuig met behulp van goedkope sensoren en computers. Ook vond er geen communicatie plaats tussen de UAV en UGV. Het team voerde zowel software-in-the-loop-simulaties als buitenexperimenten uit en toonde aan dat het algoritme effectief is bij het uitvoeren van landingsmanoeuvres. Met behulp van een kleine, op maat gemaakte quadrotor en een UGV op joggingsnelheid experimenteerden de onderzoekers met landingen.
Het werk combineert GPS-ontkend gedrag en een experimenteel bewezen gedrag. Het maakt gebruik van op zicht gebaseerde lokalisatie met visuele inertiële odometrie, een unieke markering bovenop het grondvoertuig ontworpen voor deze toepassing, en gedrag en controle aan boord. Bovendien werden deze gedragingen uitgevoerd aan boord van een kleine UAS met aanzienlijke rekenbeperkingen.
De custom marker bovenop het grondvoertuig is speciaal ontworpen voor de landingstaak. Het bevat kleinere markeringen binnen de grotere markering die nog steeds kunnen worden bekeken, zelfs als de camera de markering nadert. De aanpak kan de afhankelijkheid van de vaste markering bovenop het grondvoertuig verminderen en deze vervangen door kunstmatige intelligentie die het voertuig herkent waarop het wil landen.
Sensor
- Wat is een dynamo?
- Draagbare softwareagents:een 'Goldilocks'-benadering van IoT-connectiviteit
- Wat maakt een innovator?
- Rapid Agent Aerosol Detector voor biologische agentia
- EV versus ICE:hoe verschilt het ontwerp van de kabelboom?
- Adapter maakt alle hoofdtelefoons intelligent
- High-Altitude Unmanned Aerial Vehicle (UAV) voor het bewaken van meteorologische parameters
- Oplaadpoort voor autonome dronezwermen
- Is het publiek klaar voor een autonoom voertuig van niveau 4?
- Wat is een chassisgrond?
- Wolfraam grondstaaf