| Positioneerder | Gedeelte (roteren/kantelen) | Breng de naden naar een vlakke positie | Naden uit positie op een beweegbaar onderdeel |
| Draaischijf / Indextafel | Deel (index tussen stations) | Overlapbelasting bij lassen | Laad-/ontlaadtijd beperkt de doorvoer |
| Manipulator (kolom en boom) | Fakkel/hoofd | Reik naden op groot vast werk | Het onderdeel is te groot om vrij te kunnen oriënteren |
Hoe te kiezen:stem de machine af op de beperking
De duidelijkste aanpak is om het knelpunt in uw huidige proces te identificeren en vervolgens de apparatuur te selecteren die dit elimineert.
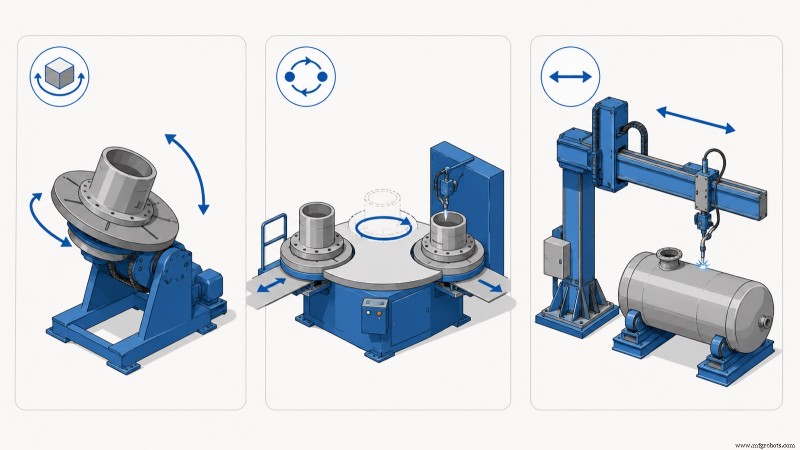
Als de beperking Laspositie is
Wanneer lassers boven het hoofd of onder steile hoeken werken, of een robot de juiste werkhoek niet kan behouden, is de oriëntatie de beperking. Een klepstandsteller lost dit op door het onderdeel te heroriënteren naar vlak, wat volgens AWS D1.1 een hogere stroom- en voortbewegingssnelheid ondersteunt, wat aanzienlijke kwaliteits- en snelheidswinst oplevert. Twee-assige positioneerders verwerken naden in meerdere vlakken; eenheden met één as zijn geschikt voor cilindrische geometrie.
Als de beperking de laadtijd is
Wanneer de robot of lasser stil zit te wachten op onderdelen, is het knelpunt de overlap van de cycli. Een draaitafel met twee stations verplaatst de lading buiten het kritieke pad, waardoor de benutting van de robot vaak met 30-40% wordt verbeterd en de doorvoer tegen lage kosten wordt verhoogd.
Als de beperking de onderdeelgrootte is
Voor grote schepen, tanks of lange constructies die niet vrij kunnen draaien, is de beperking het bereik. Een manipulator, meestal gecombineerd met een positioner met één as, laat de toorts langs de naad bewegen terwijl het onderdeel onder de giek roteert – standaard bij de productie van drukvaten en pijpspoelen.
Ze werken vaak samen
In de praktijk vraagt een lascel zelden “welke?”; er wordt gevraagd "welke combinatie?" Een cel van zware makelij zou een positioner met één as kunnen combineren om het schip te roteren met een kolom-en-giekmanipulator om de kop langs de naad te dragen. Een robotwerkplaatscel zou een draaitafel met twee stations voor overlap van de lading kunnen koppelen aan positioneerders met twee assen aan elk vlak voor naadoriëntatie, waardoor één robot het ene onderdeel kan lassen terwijl een operator het andere herlaadt. Door elke machine een naam te geven op basis van zijn functie (oriëntatie, overlap of bereik) blijven de beslissingen over de indeling duidelijk, zelfs als ze alle drie naast elkaar bestaan.
In geautomatiseerde cellen worden alle drie de systemen gecoördineerde bewegingsassen die worden bestuurd door de robot-PLC. Specificaties en offertes voor de robot, stroombron en positioner worden samen gepresenteerd in de lasrobotcelselectiegids van EVST.
Kosten en complexiteit, in het kort
Grofweg is een positioner met één as de eenvoudigste en goedkoopste optie; een draaitafel met twee stations voegt een tweede bevestigingsset en indexeringsmechanisme toe; een kolom-en-giek-manipulator is doorgaans het meest kapitaalintensief vanwege zijn structuur en bereik. De echte vergelijking betreft echter de kosten per goede las bij uw doorvoerdoel. Een draaitafel die de benutting van de robot verdubbelt, kan zijn prijs snel terugverdienen, terwijl een te grote manipulator die wordt aangeschaft voor een onderdeel dat slechts twee keer per jaar wordt gelast, de investering misschien niet rechtvaardigt. Voor een gedetailleerde ROI-analyse van klepstandstellers, zie de EVST-gids voor kosten en ROI voor lasverstellers.
EVST’s assortiment werkstukhantering
EVST, met hoofdkantoor in Chengdu en productie in Wenling, biedt laspositioneerders aan in klassen met één, twee en drie assen als onderdeel van complete robotlascellen, naast QJAR-lasrobots en stroombronintegratie. Positioneerders kunnen worden gecombineerd met indexeringsstations en hoofddragende structuren, zodat de oriëntatie van de onderdelen, de overlap van de belasting en het toortsbereik samen worden ontworpen voor een bepaalde onderdelenfamilie in plaats van dat ze als afzonderlijke machines worden aangeschaft.
De robot- en lasautomatiseringslijn van EVST beschikt over de IATF16949-kwaliteitscertificering voor auto's, met CE-, SGS- en TUV-certificeringen van derden. Omdat de juiste oplossing meestal een combinatie is, beoordeelt EVST de handlingapparatuur op basis van het slechtste onderdeel en de doorvoerdoelstelling samen, in plaats van één enkele machine afzonderlijk te verkopen.
Veelgestelde vragen
Wat is het verschil tussen een lasversteller en een draaitafel?
Een lasversteller roteert en kantelt het onderdeel om elke naad vlak te maken, waardoor een oriëntatieprobleem wordt opgelost. Een draaitafel, of indextafel, wisselt onderdelen uit tussen laad- en lasstations, waardoor een probleem van cyclus-overlapping wordt opgelost. Ze worden vaak gecombineerd; een draaitafel kan op elk vlak positioners dragen.
Waar wordt een lasmanipulator voor gebruikt?
Een lasmanipulator beweegt de toorts in plaats van het onderdeel. Het is ideaal voor grote schepen, tanks en lange constructies die niet vrij kunnen draaien. Het wordt meestal gecombineerd met een positioner met één as die het onderdeel onder de giek roteert.
Heb ik een positioner of een manipulator nodig?
Kies op onderdeelgrootte. Als het onderdeel kan worden gedraaid en gekanteld om de naden plat te maken, is een positioner voldoende en eenvoudiger. Als het onderdeel te groot is om vrij te kunnen oriënteren en de toorts naar de naad moet bewegen, is een manipulator (meestal met een positioner met één as) vereist. Veel zware productiecellen gebruiken beide.
Kan één cel samen een positioner, een draaitafel en een manipulator gebruiken?
Ja, en velen doen dat ook. Elk lost een andere beperking op (oriëntatie, overlap van lading of bereik), dus een cel combineert ze vaak. In geautomatiseerde cellen worden ze als gecoördineerde bewegingsassen onder de robotbesturing in bedrijf gesteld.
Welke optie geeft de grootste verbetering van de doorvoer?
Het hangt af van het knelpunt. Als lassers uit positie werken, levert een klepstandsteller de grootste kwaliteits- en snelheidswinst op. Als de robot wacht op laden, levert een draaitafel met twee stations de grootste benuttingswinst op. Als het onderdeel te groot is om te oriënteren, is een manipulator de machine die het mogelijk maakt. Identificeer eerst de beperking en kies vervolgens de machine die deze opheft.
Waar naartoe
Voor technische details over klepstandstellerklassen leest u de Welding-positioner Guide
. Om een EVST-versteller aan uw onderdeel te koppelen en een offerte te ontvangen, raadpleegt u de Positionerselectie
pagina. Voor de complete robotlascel raadpleegt u onze Welding Robot Guide
en de Celselectiegids
. Neem voor inkoopvragen contact op met de verkoopafdeling van EVST via de contactpagina
.
Over de auteur:Het redactieteam van EVST schrijft over industriële robotica en intelligente productie voor ingenieurs en operationele leiders die automatiseringsprojecten evalueren. EVST (EVS TECH CO., LTD), opgericht in Chengdu in 2018, heeft meer dan 600 automatiseringsprojecten en schepen geleverd aan meer dan 100 landen, met IATF16949-certificering voor auto's en CE/SGS/TUV-certificeringen van derden voor de QJAR-, collaboratieve robot-, SCARA- en delta-productfamilies.