


Arduino-sonar
Componenten en benodigdheden
 |
| × | 1 | |||
 |
| × | 1 |
Over dit project
Radarschermvisualisatie voor HC-SR04
Arduino-code:
Verzendt sensormetingen voor elke graad die is verplaatst door de servowaarden die naar de seriële poort zijn verzonden om te worden opgehaald door verwerking
https://github.com/faweiz/My-Arduino/blob/master/arduino_radar/Arduino_radar_HC_SR04/Arduino/Arduino_radar_server_arduino/Arduino_radar_server_arduino.ino
Verwerkingscode:
Brengt een gebied in kaart van wat de HC-SR04 ziet vanuit een bovenaanzicht. Neemt en toont 2 metingen, een van links naar rechts en een van rechts naar links. Geeft een gemiddelde van de 2 metingen weer
https://github.com/faweiz/My-Arduino/blob/master/arduino_radar/Arduino_radar_HC_SR04/Processing-code/Arduino_radar_client_processing/Arduino_radar_client_processing.pde
Vragen zijn welkom!
Github:https://github.com/faweiz
Portfolium:https://portfolium.com/faweiz
Linkedin:https://www.linkedin.com/in/faweiz
Code
- Naamloos bestand
Naamloos bestandArduino
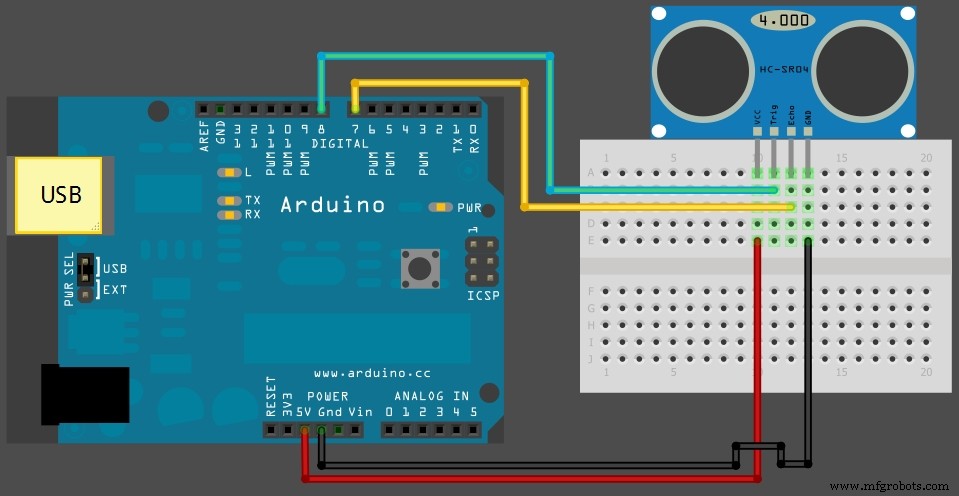
/*https://www.hackster.io/faweiz/arduino-radarRadar Schermvisualisatie voor HC-SR04 Stuurt sensormetingen voor elke graad die wordt verplaatst door de servowaarden die naar de seriële poort worden gestuurd om te worden opgehaald door Processing*/#include#include #define TRIGGER_PIN 2 // Arduino pin 2 verbonden met triggerpin op de ultrasone sensor.#define ECHO_PIN 3 // Arduino pin 3 verbonden met echopin op de ultrasone sensor.#define MAX_DISTANCE 150 // Maximale afstand waarvoor we willen pingen (in centimeters). De maximale sensorafstand is 400-500 cm. #define SERVO_PWM_PIN 9 // stel servo in op Arduino's pin 9 // betekent -angle .. angle#define ANGLE_BOUNDS 80#define ANGLE_STEP 1 int angle =0; // richting van servobeweging // -1 =terug, 1 =vooruit int dir =1; Servo myservo; NewPing-sonar (TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); void setup() { Serial.begin(9600); // initialiseer de seriële poort:myservo.attach (SERVO_PWM_PIN); // stel servo in op Arduino's pin 9} void loop () { delay (50); // we moeten opnieuw normaliseren naar positieve waarden, want de hoek is van -ANGLE_BOUNDS .. ANGLE_BOUNDS // en de servowaarde moet positief zijn myservo.write(angle + ANGLE_BOUNDS); // lees afstand van sensor en stuur naar serieel getDistanceAndSend2Serial (hoek); // bereken hoek if (hoek>=ANGLE_BOUNDS || hoek <=-ANGLE_BOUNDS) { dir =-dir; } hoek +=(dir * ANGLE_STEP); } int getDistanceAndSend2Serial(int hoek) {int cm =sonar.ping_cm(); Serial.print (hoek, DEC); Serieel.print(","); Serial.println(cm, DEC); }
Code
https://github.com/faweiz/My-Arduino/tree/master/arduino_radarArduino_radar_server_arduino.ino
Arduino_radar_client_processing.pde
Schema's
Productieproces