


Bluetooth-gestuurde auto
Componenten en benodigdheden
 |
| × | 1 | |||
| × | 2 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Apps en online services
 |
|
Over dit project
Hallo daar!
Alles wat kan worden gecontroleerd, is geweldig. Is het niet? Wij mensen houden ervan om dingen te controleren en daarom zijn automatisering en robotica zo fascinerend.
Deze tutorial leert je hoe je je eigen Bluetooth-gestuurde auto kunt maken. Dus laten we beginnen.
Dit wordt een Bluetooth-gestuurde auto, dus voor dit project zullen we de HC-05 Bluetooth-module gebruiken om de besturende datapakketten te ontvangen.
We hebben ook een Android-app nodig die de controlerende datapakketten naar de Bluetooth-module stuurt. We zullen hiervoor een applicatie van derden gebruiken (klik hier om te downloaden).
- -> Oké mensen! Laten we de hardware bouwen.
- -> Carrosserie van de auto.
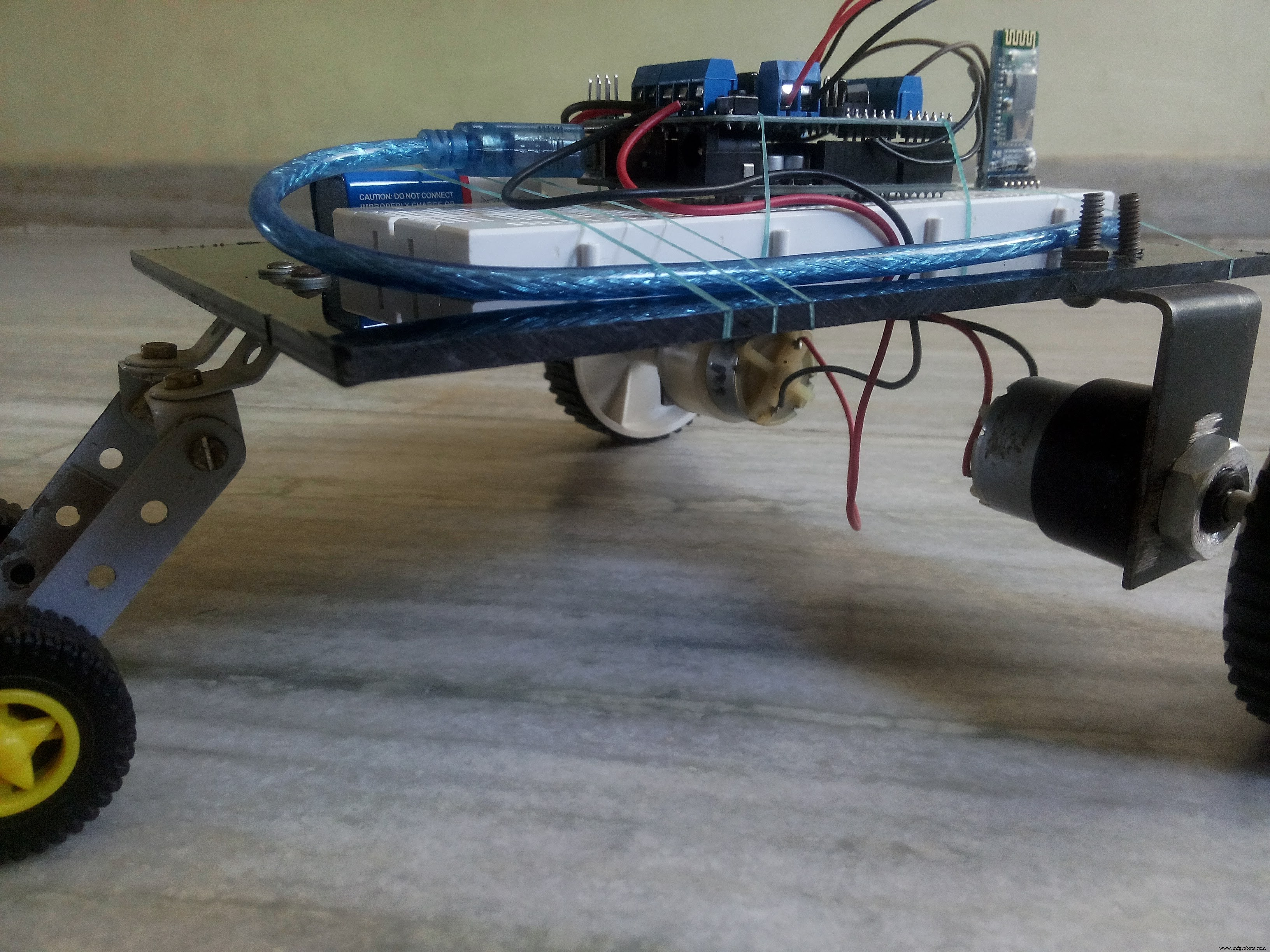
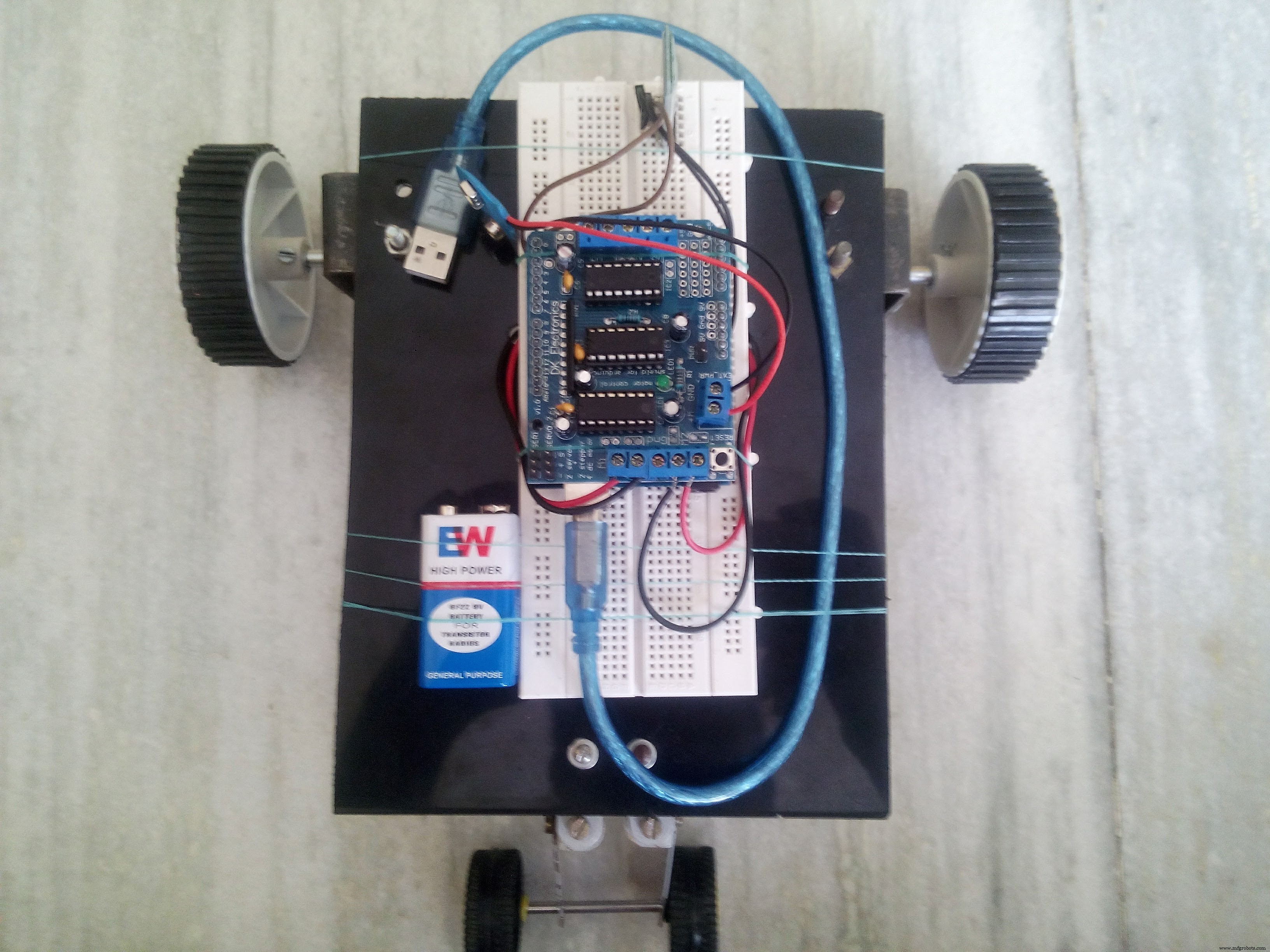
De auto die we voor dit project bouwen, wordt een dubbele motorwagen. Ik gebruikte twee 12 v 200 rpm DC-motoren. U kunt een kant-en-klaar chassis gebruiken. Ik gebruikte een PVC-plaat als chassis.
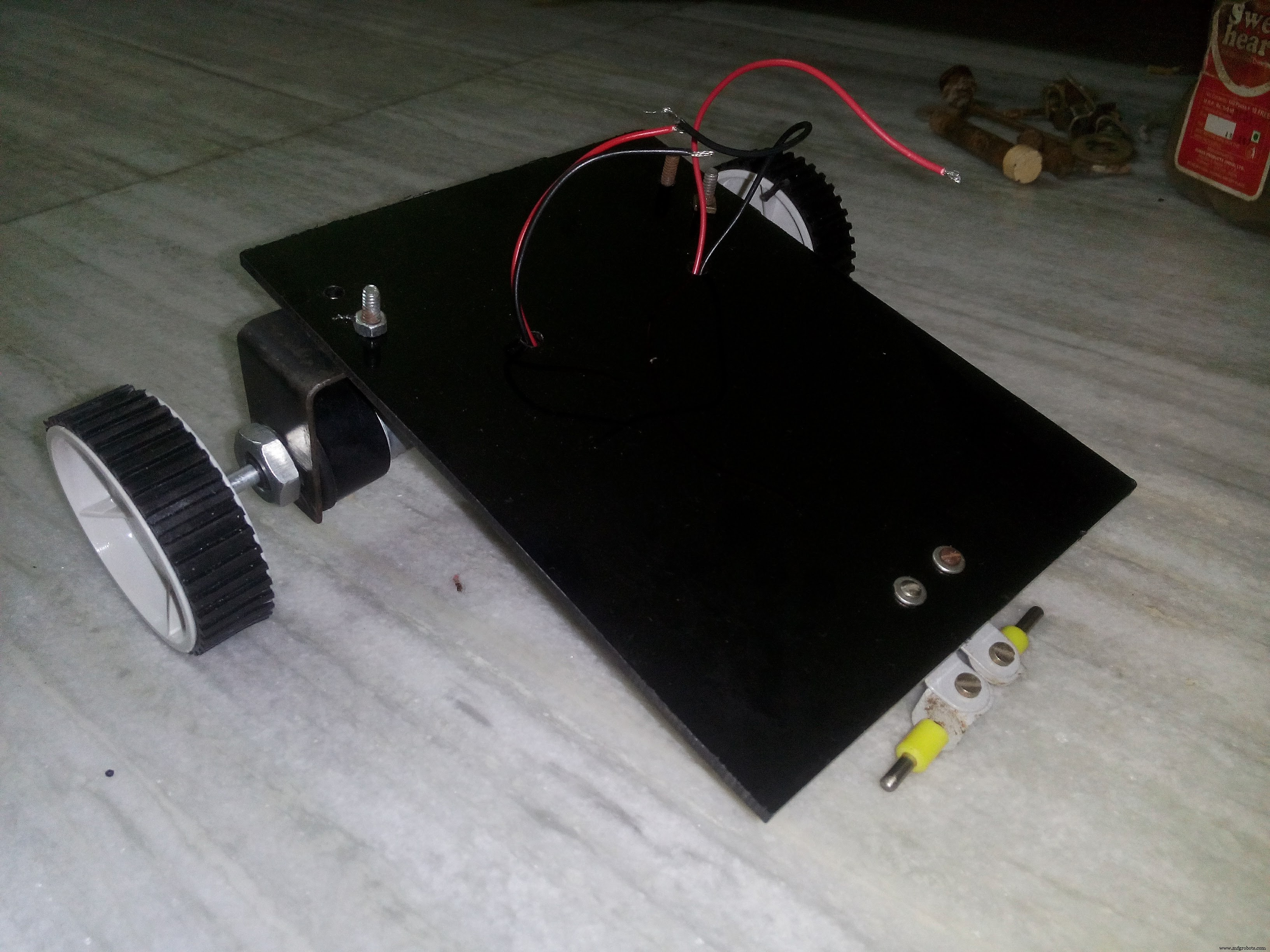
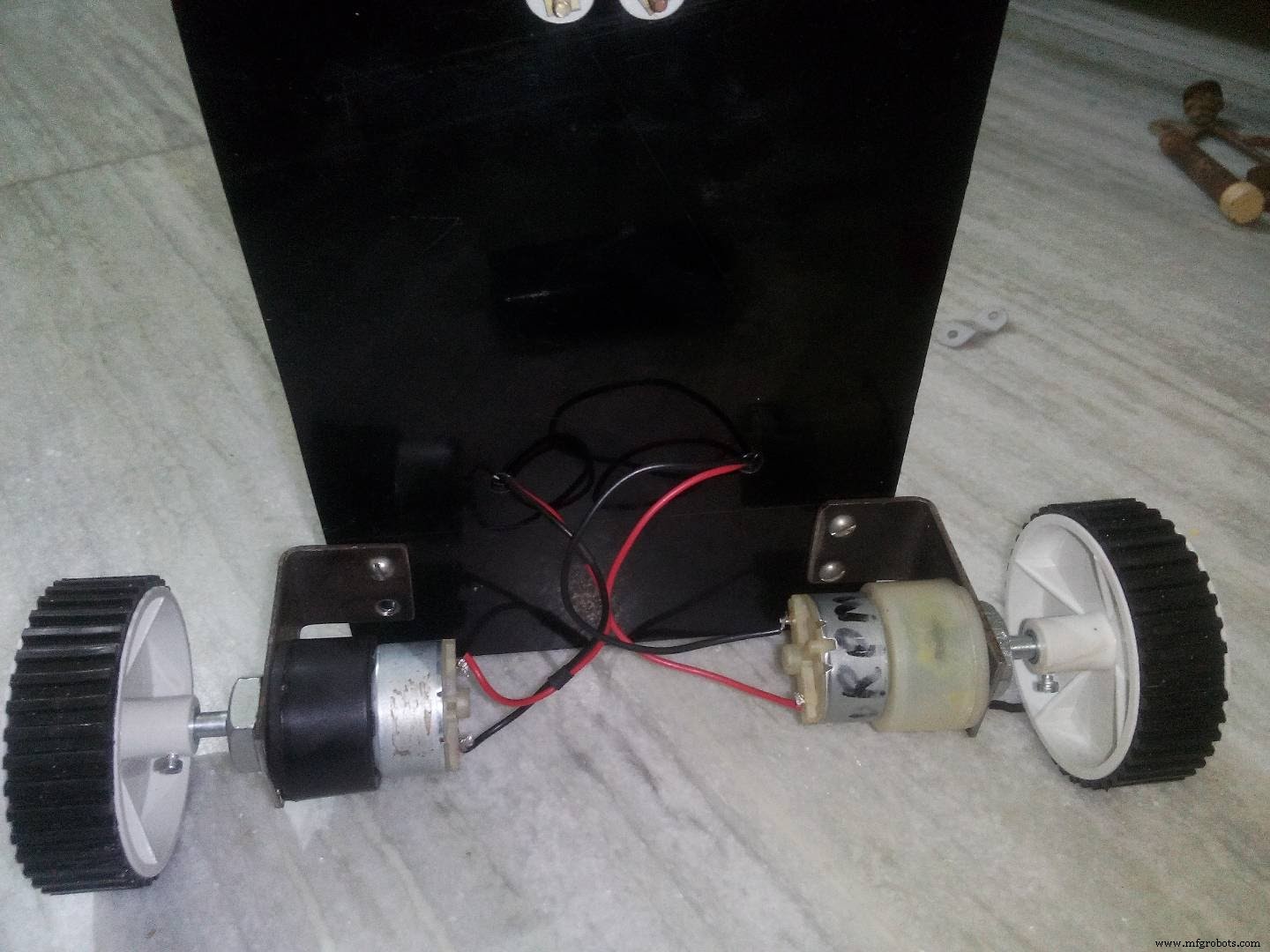
Zo is de basisstructuur van onze auto klaar. U kunt dit ontwerp gebruiken of u kunt uw eigen ontwerp ontwikkelen, maar houd het gewicht zo laag mogelijk, want dit is een ontwerp met twee motoren.
--> Circuit
Laten we nu het circuit bouwen
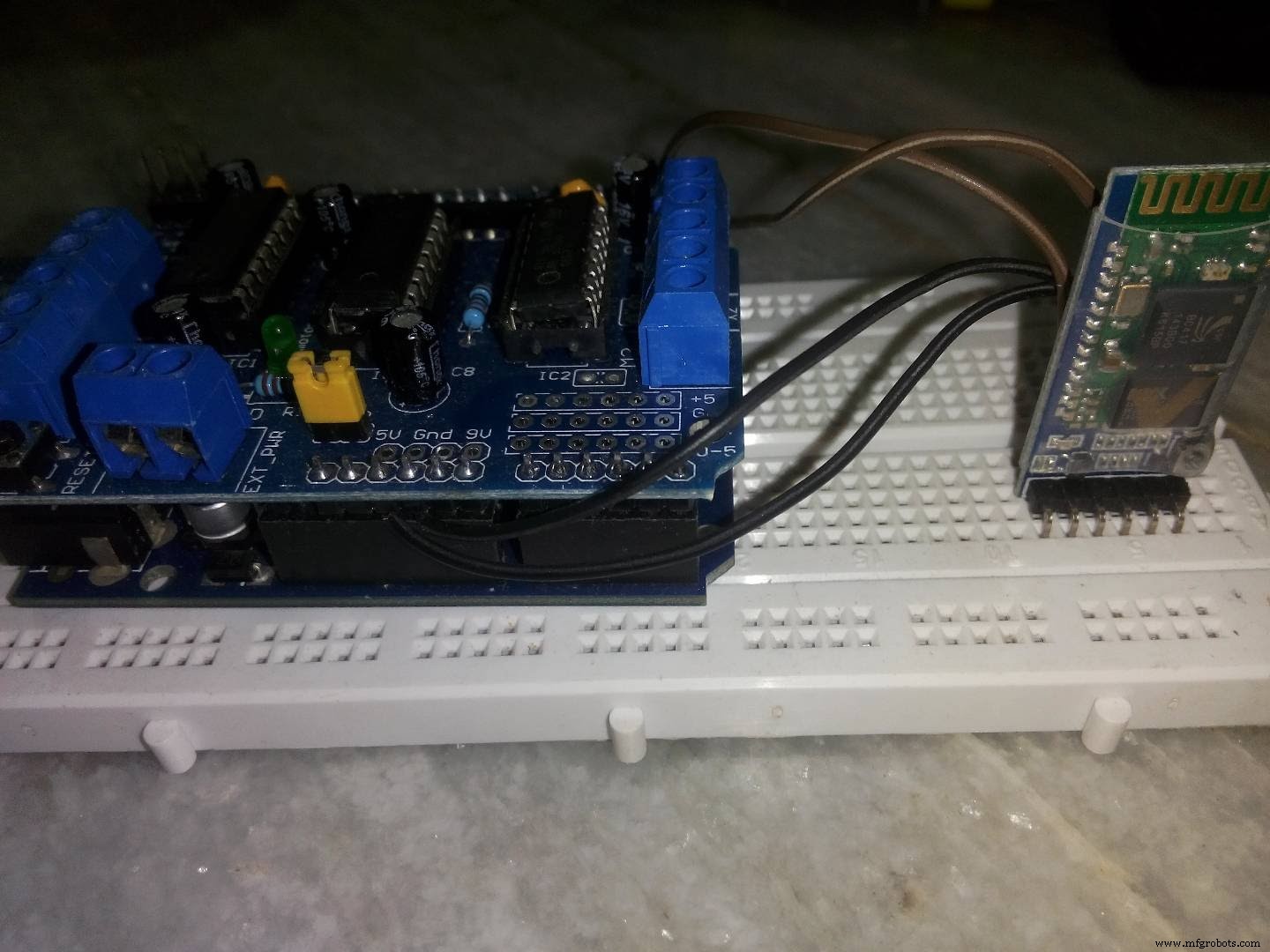
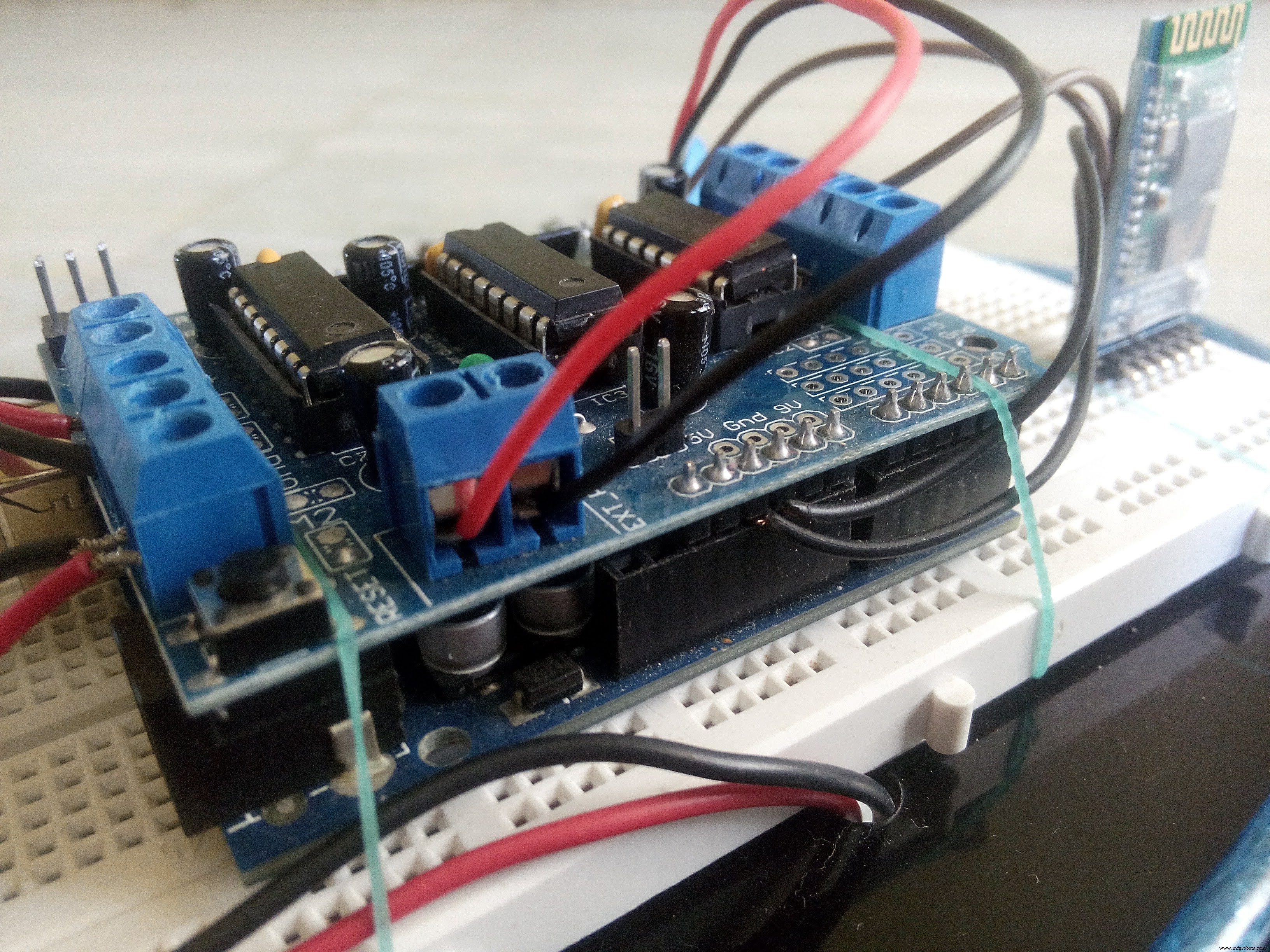
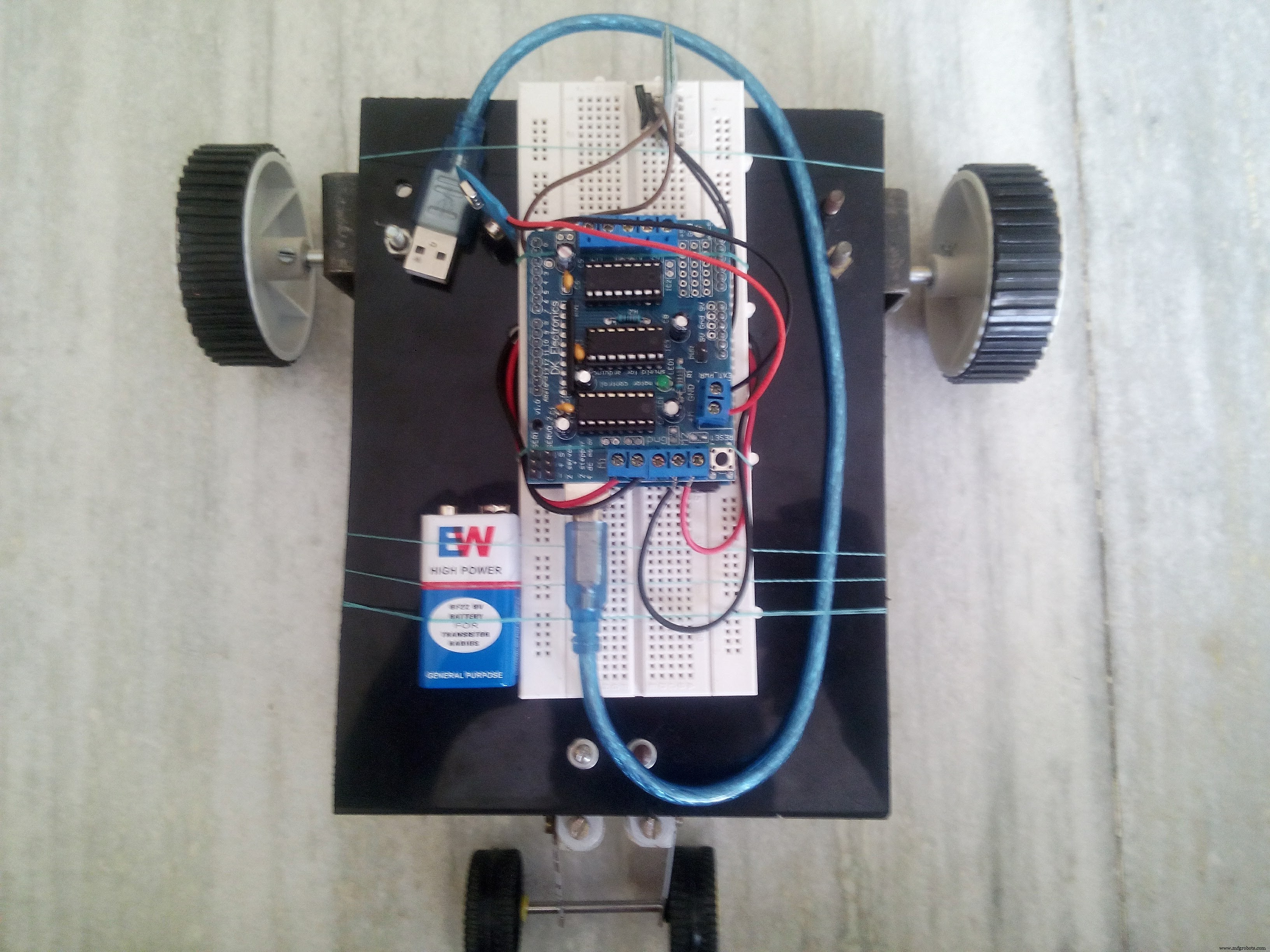
Volg het schema om de aansluitingen te maken. Zo ziet het eruit nadat alle verbindingen zijn gemaakt.
--> Voeding
Dit is een beetje cruciaal.
Voor het aandrijven van de Arduino Uno wordt een powerbank met 5v uitgangsspanning gebruikt. Dit is niet genoeg om die 12v dc motoren aan te drijven. We hebben dus een extra stroombron nodig.
Ik heb twee 9v-batterijen in serie gebruikt om 18v-voeding te krijgen. Het grote probleem hier was dat hier ook een behoorlijke hoeveelheid stroom nodig was.
Mijn accu's waren niet in staat om voldoende stroom te leveren en dus waren de prestaties van deze auto niet 100% bevredigend. Het werkte, maar de motoren draaiden op zeer lage snelheid.
Dus ik raad aan om een 12v-batterij te gebruiken, anders zou je een compromis moeten sluiten met de snelheid.
-->Code
Hier zullen we de draairichting van motoren gebruiken om de richting van de auto te regelen.
Vooruit - Beide motoren bewegen in voorwaartse richting
Achteruit - Beide motoren bewegen in achterwaartse richting
Links - Linkermotor gaat achteruit en rechtermotor gaat vooruit
Rechts - Linkermotor gaat vooruit en rechtermotor gaat achteruit
Stop - Beide motoren stoppen
void forward(){ motor1.run(FORWARD); motor2.run(FORWARD);}void achteruit(){ motor1.run(BACKWARD); motor2.run(ACHTERWAARTS);}leeg links(){ motor1.run(ACHTERWAARTS); motor2.run(FORWARD);}void right(){ motor1.run(FORWARD); motor2.run(ACHTERUIT);}void Stop(){ motor1.run(RELEASE); motor2.run(RELEASE);}
----------------------------------------------- ---------------------------------------
Dus dat was het!
1. Upload de code gewoon naar de Arduino.
2. Maak de verbindingen.
3. Start de app.
4. Verbind je telefoon met de auto.
Hier is onze voltooide SCHOONHEID!

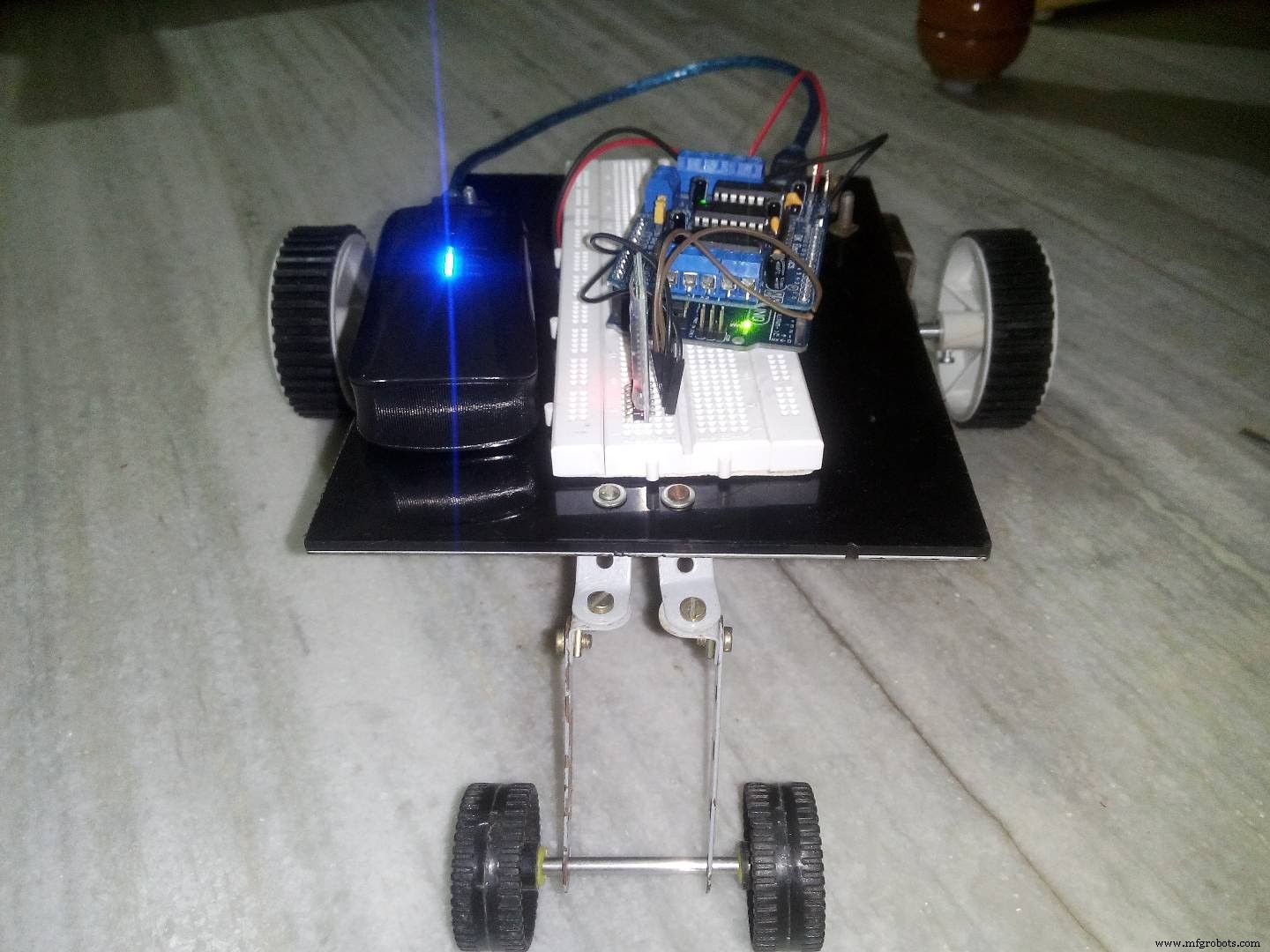
Ik hoop dat deze tutorial goed genoeg was om je op weg te helpen. Als je suggesties hebt voor enkele wijzigingen of verdere toevoegingen aan dit project, laat het me dan weten in het commentaargedeelte.
Code
- De code
De codeC/C++
Deze code moet geüpload worden op Arduino Uno#includeAF_DCMotor motor1(1); //motor1 is de linker motorAF_DCMotor motor2(2); //motor2 is de juiste motorint val;void setup(){Serial.begin(9600); motor1.setSpeed (255); //motorsnelheid is ingesteld op motor2.setSpeed (255); Stop();}void loop() { bt=Serial.read();if(val=='1') //wanneer de bluetooth-module 1 ontvangt, gaat de auto vooruit{ forward(); }if(val=='2') //wanneer de bluetooth-module 2 ontvangt, gaat de auto achteruit{ achteruit(); }if(val=='3') //wanneer de bluetooth-module 3 ontvangt, gaat de auto naar links{ left(); }if(val=='4') //wanneer de bluetooth-module 4 ontvangt, gaat de auto naar rechts{ right(); }if(val=='5') //wanneer de bluetooth-module 5 ontvangt, stopt de auto{ Stop(); }}void forward(){ motor1.run(FORWARD); motor2.run(FORWARD);}void achteruit(){ motor1.run(BACKWARD); motor2.run(ACHTERWAARTS);}leeg links(){ motor1.run(ACHTERWAARTS); motor2.run(FORWARD);}void right(){ motor1.run(FORWARD); motor2.run(ACHTERUIT);}void Stop(){ motor1.run(RELEASE); motor2.run(RELEASE);}
Schema's
Dit zijn de verbindingen. Sluit de 12v-stroombron aan op het motoraandrijfscherm. Houd er rekening mee dat het schema niet de externe voedingsbron bevat.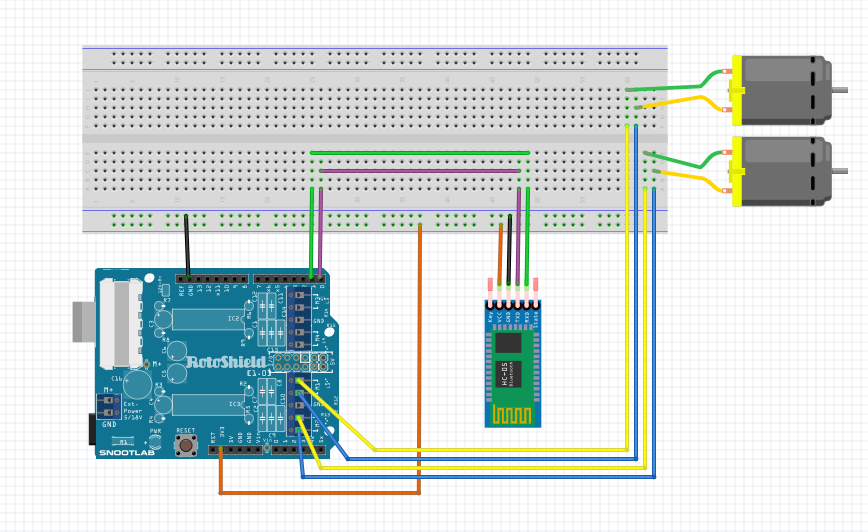
Productieproces
- Raspberry Pi-robot bestuurd via Bluetooth
- Zet je RC-auto om naar Bluetooth RC-auto
- Met joystick bestuurde RC-auto
- Arduino met Bluetooth om een LED te bedienen!
- Eenvoudige UNO-rekenmachine
- Spraakgestuurde robot
- Persistentie van visie
- Bluetooth spraakgestuurde apparaten met OK Google
- Wi-Servo:Wi-Fi Browser gestuurde servomotoren
- RC Porsche Car (Arduino Project)
- Arduino bestuurd USB-trackpad