


Robotarm met controller
Componenten en benodigdheden
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 |
Apps en online services
 |
|
Over dit project
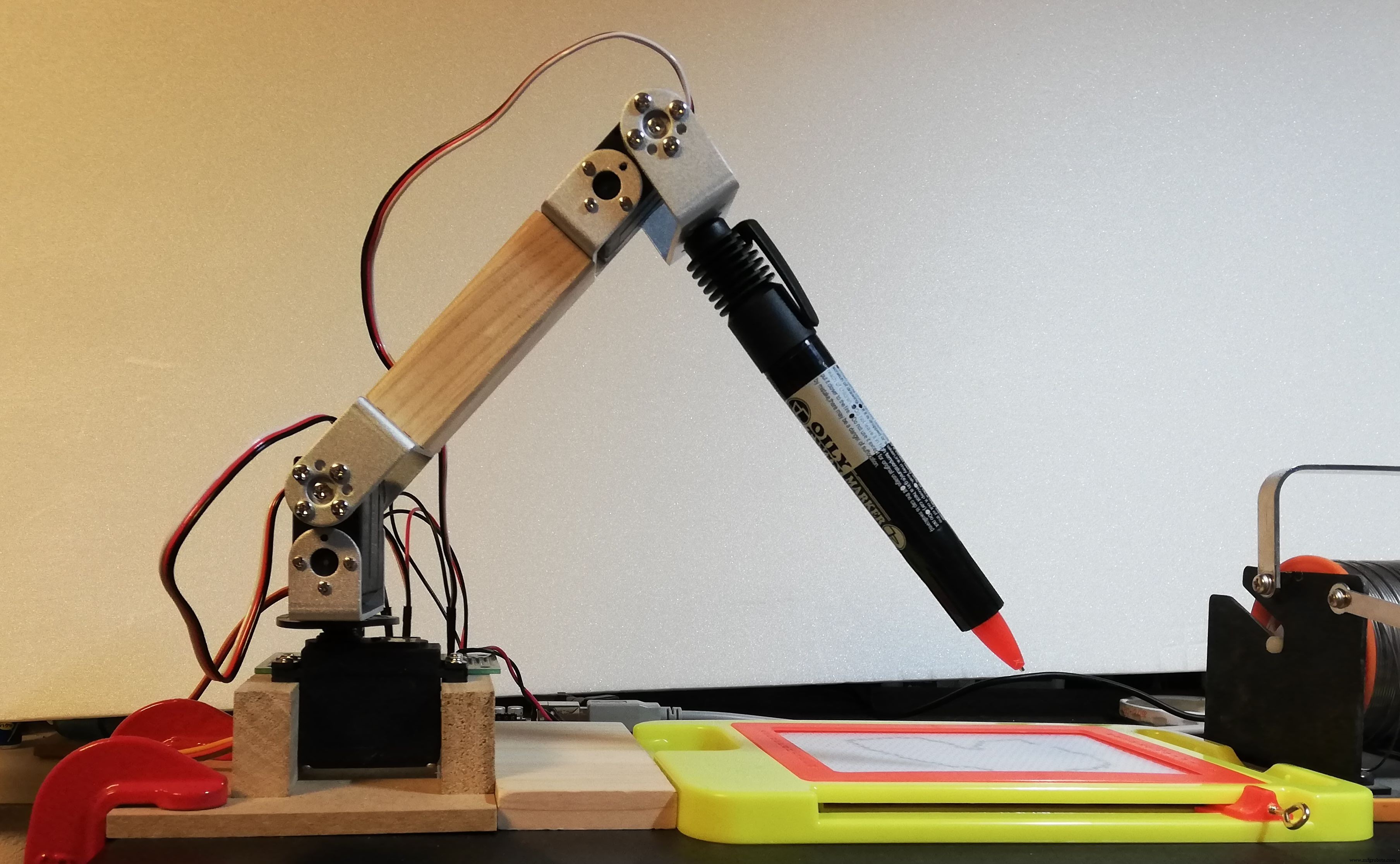
Ik heb de obotarm en de bijbehorende controller gemaakt.
Grondwet
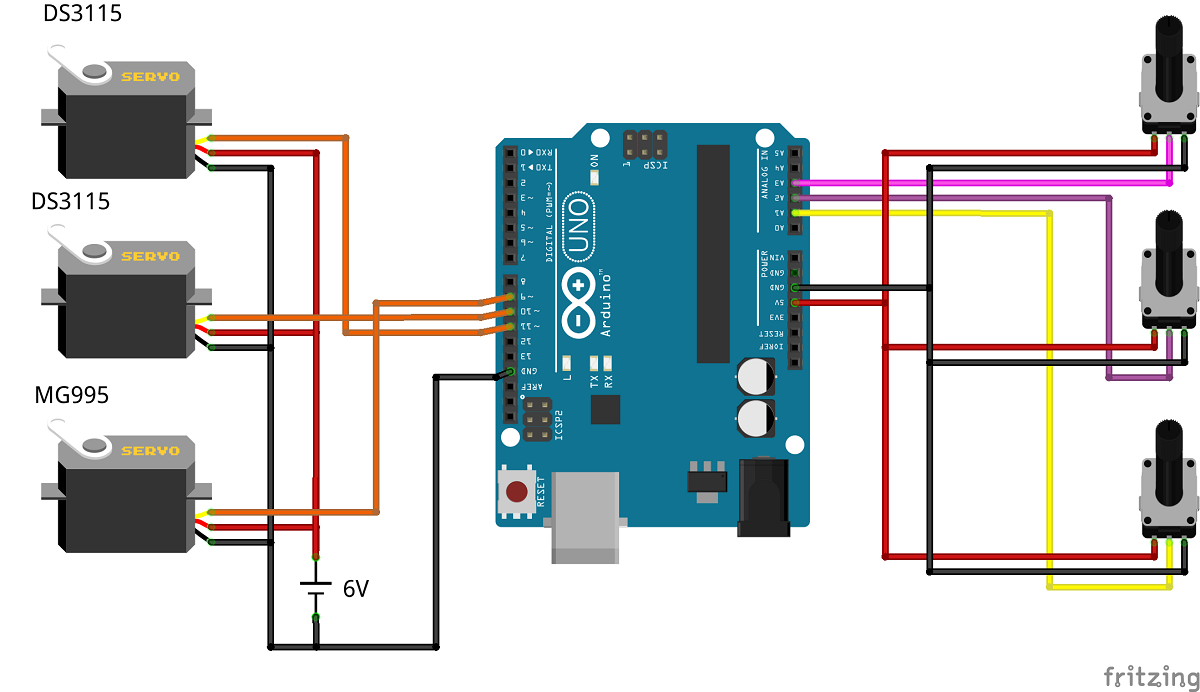
De robotarm maakt gebruik van drie conventionele PWM-servo's en elke hoek wordt geregeld door een variabele weerstand. De draaipotentiometer gebruikte B-curve 10k ohm.
Productie van robotarmen
Twee DS3115-servomotoren werden gebruikt in de verticale richting en de MG995-servomotor werd gebruikt in de zwenkrichting.
Controller Productie
Ik heb een controllerbehuizing gemaakt met een 3D-printer.
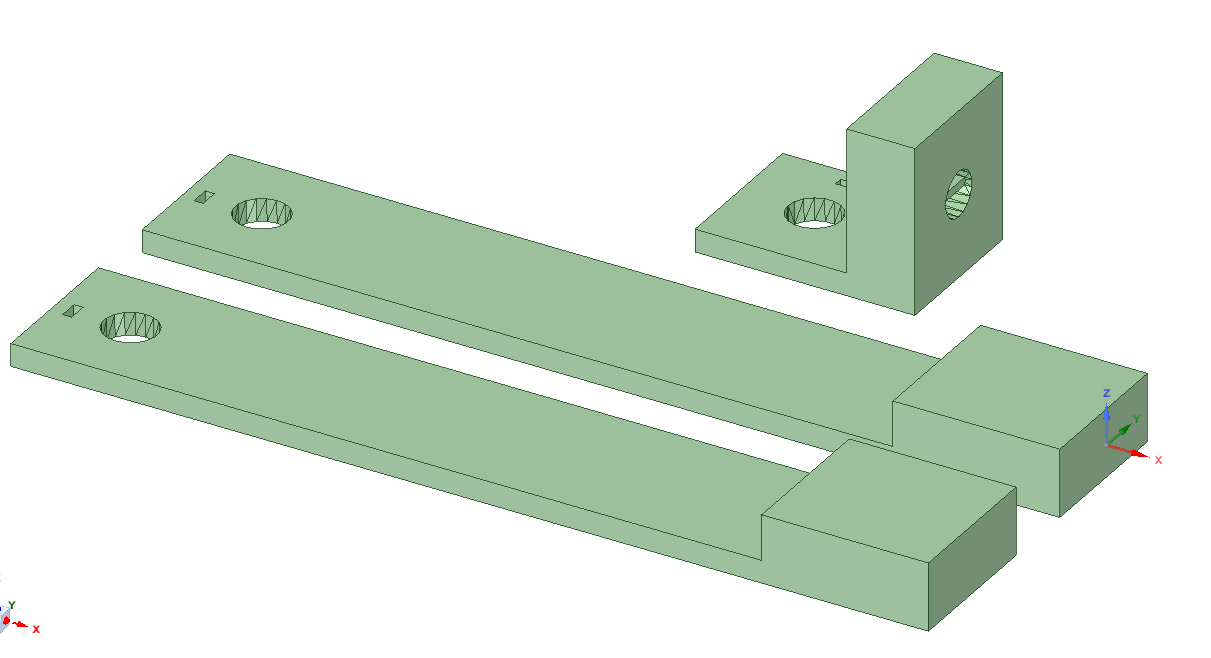
Een gat en een positioneringsgat om door de knop van de draaipotentiometer te schroeven, en een deuk om de knop in te steken zijn aanwezig.

Monteer de gefabriceerde onderdelen en drie roterende potentiometers om te voltooien!
De draaipotentiometer is nu in dezelfde richting geplaatst als de draaias van de servomotor van de robotarm!
Arduino-code
Deze eenvoudige code leest eenvoudig de waarde van de draaipotentiometer met een analoge pin, zet deze om in een hoek en voert deze in op de bijbehorende servo.
#include
Servo myservo1, myservo2, myservo3;
float th1=90.0,th2=90.0,th3=90.0;
float val1, val2, val3;
void setup() {
Serial.begin(9600);
myservo1.attach(9, 500, 2420); //MG995
myservo2.attach(10, 820, 2140); //DS3115
myservo3.attach (11, 820, 2140); //DS3115
set_servo();
}
void loop() {
val1 =analogRead(A1);
val2 =analogRead(A2);
val3 =analogRead(A3);
th1 =kaart(val1, 170.0, 880,0, 0.0, 180,0);
if(th1>=180.0){
th1 =180,0;
}else if(th1 <=0,0){
th1 =0,0;
}
th2 =kaart(val2, 150,0, 860,0, 0.0, 180,0);
if(th2>=180.0){
th2 =180,0;
}else if(th2 <=0.0){
th2 =0.0;
}
th3 =map(val3, 860,0, 160,0, 0,0, 180,0);
if(th3>=180,0){
th3 =180,0;
} else if(th3 <=45.0){
th3 =45.0;
}
set_servo();
}
void set_servo( ){
myservo1.write(th1);
myservo2.write(th2);
myservo3.write(th3);
}
Bediening
Voltooi door de draaipotentiometer te bedraden en aan te sluiten op Arduino!
Aangepaste onderdelen en behuizingen
Productieproces
- Een mobiele robot met op zicht gebaseerde obstakelvermijding
- Raspberry Pi webgestuurde robot met video
- Simple Pi Robot
- Dual Arm SCARA-robot
- Desinfecterende robot met ultraviolet licht
- Unopad - Arduino MIDI-controller met Ableton
- MeArm Robotarm - Uw robot - V1.0
- Obstakels vermijden robot met servomotor
- Draaicentrum uitgerust met robotarm
- Robot combineert collaboratieve robotarm met mobiel platform
- Servo Motion verbetert de robotwerking