


Solo Servo Sweep
Componenten en benodigdheden
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 |
Over dit project
Inleiding
Solo heeft een geweldige ontwikkelomgeving, maar een gebrek aan I/O. Momenteel breekt de accessoirepoort uit met CAN, Mavlink Serial naar Pixhawk en USB naar Sololink (imx6). Door een arduino en firmata te gebruiken, kunnen aangepaste sensoren, servo's, knipperende LED's of een andere arduino-functie worden toegevoegd.
Deze tutorial leidt je door de stappen van het gebruik van een Arduino met Solo om een servo te besturen.
Softwarevoorkeuren:
- Solo-update 1.2.0 of hoger
- Arduino IDE
- Filezilla
- Putty of een andere SSH-client
Stap 1:Upload Firmata Host naar Arduino Uno
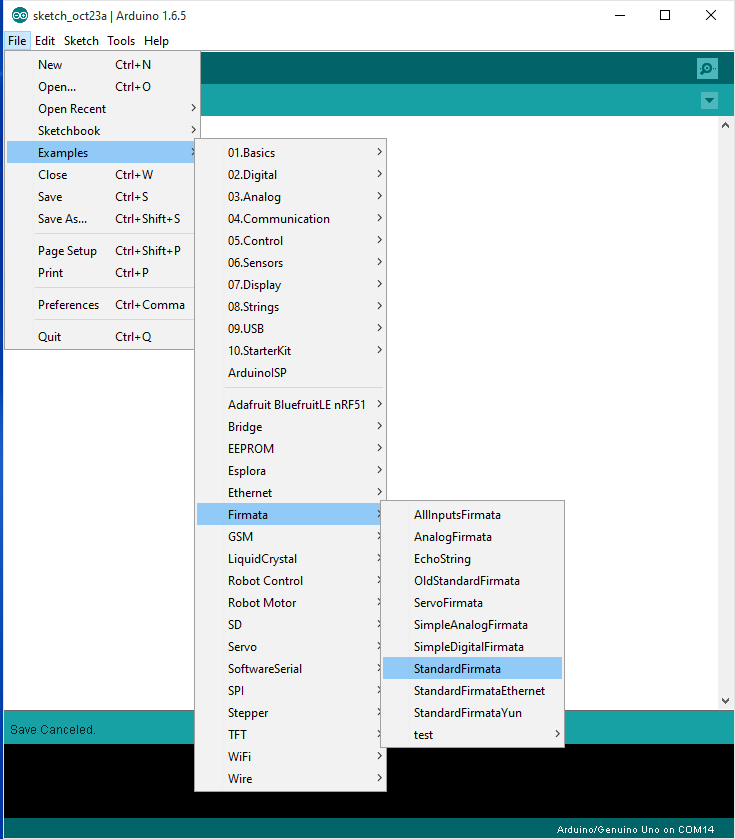
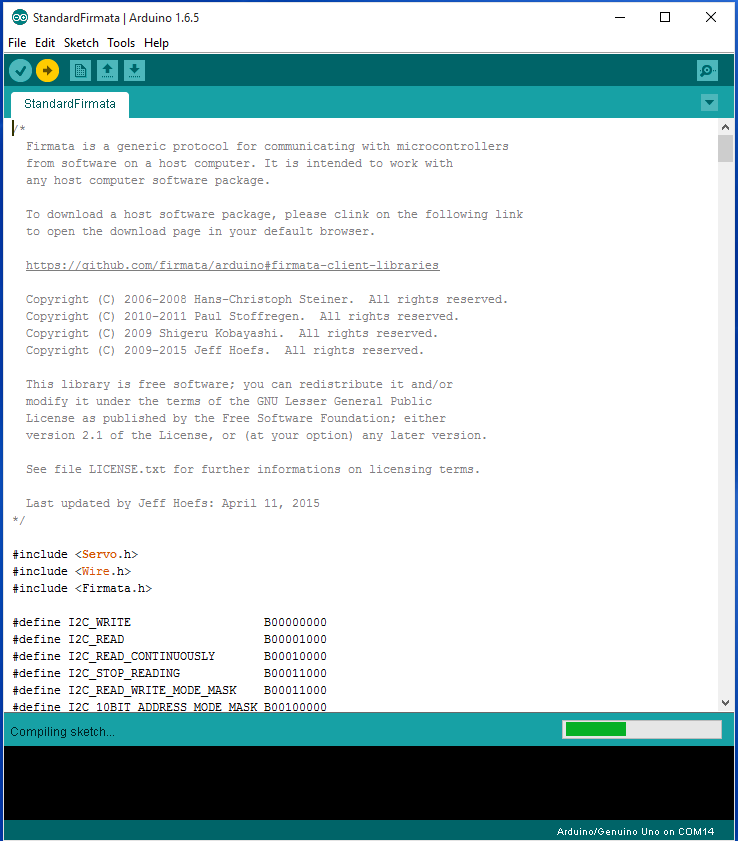
Open StandardFirmata vanaf het tabblad voorbeelden. Selecteer bord en poort. Uploaden!
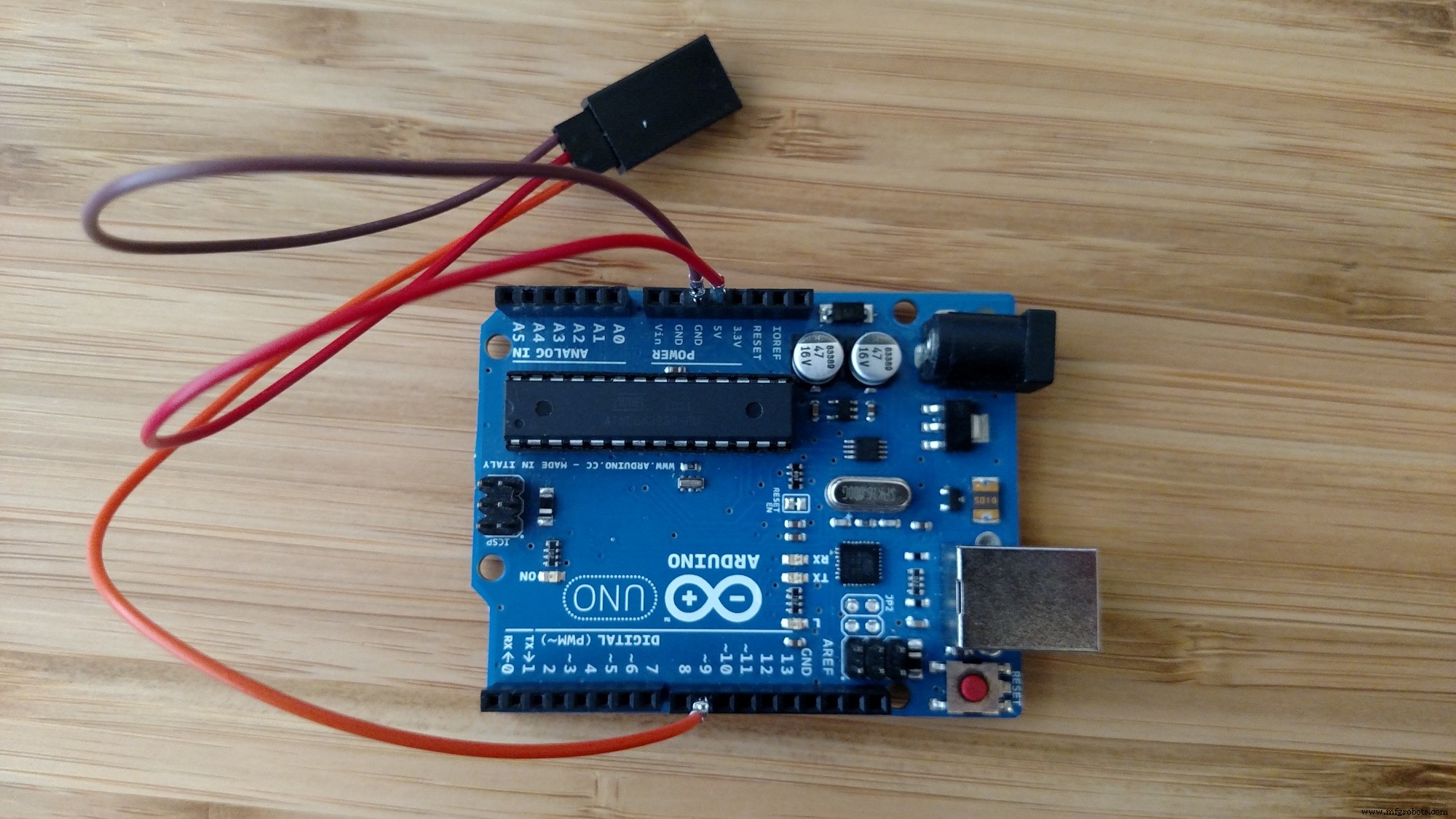
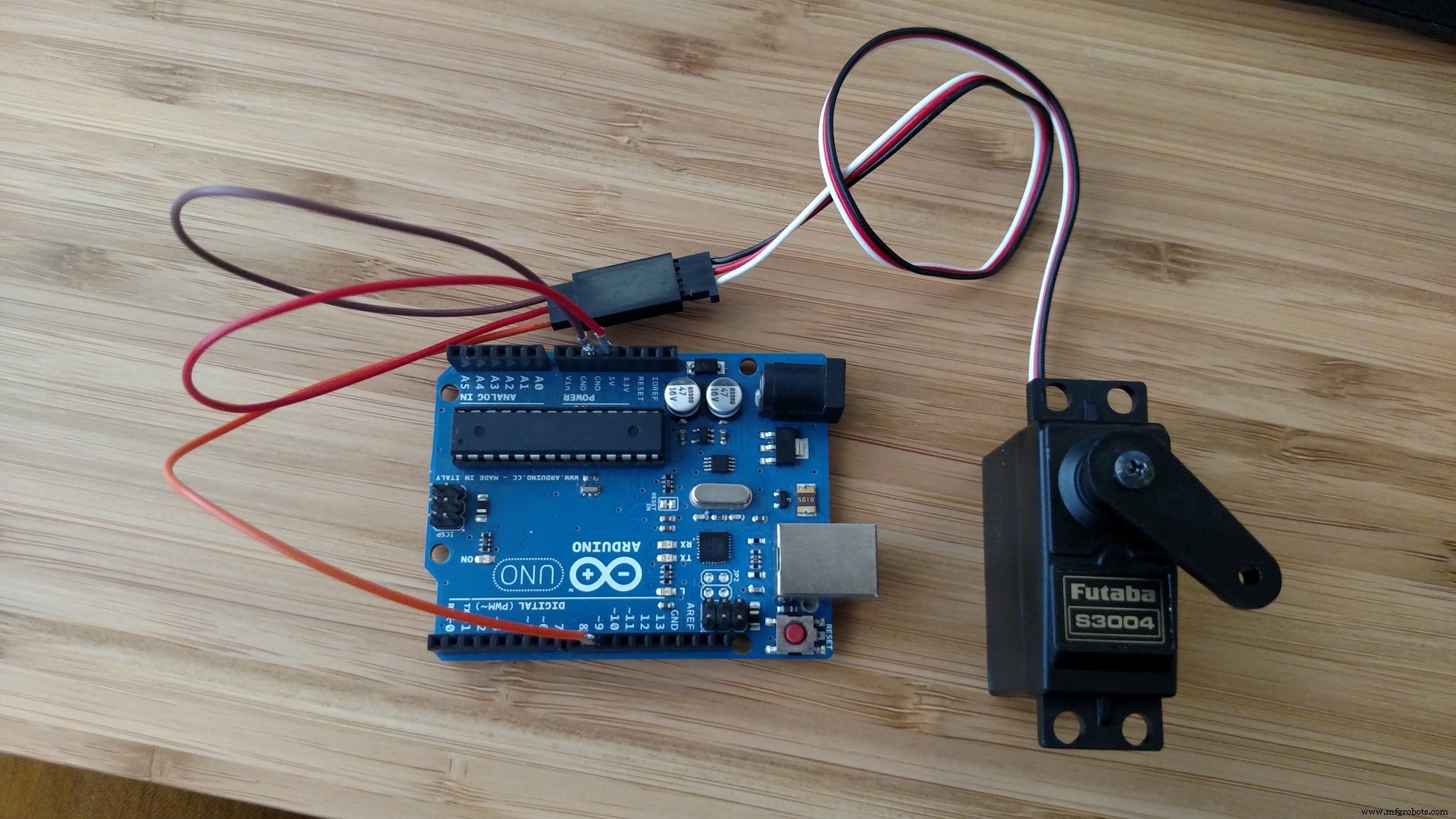
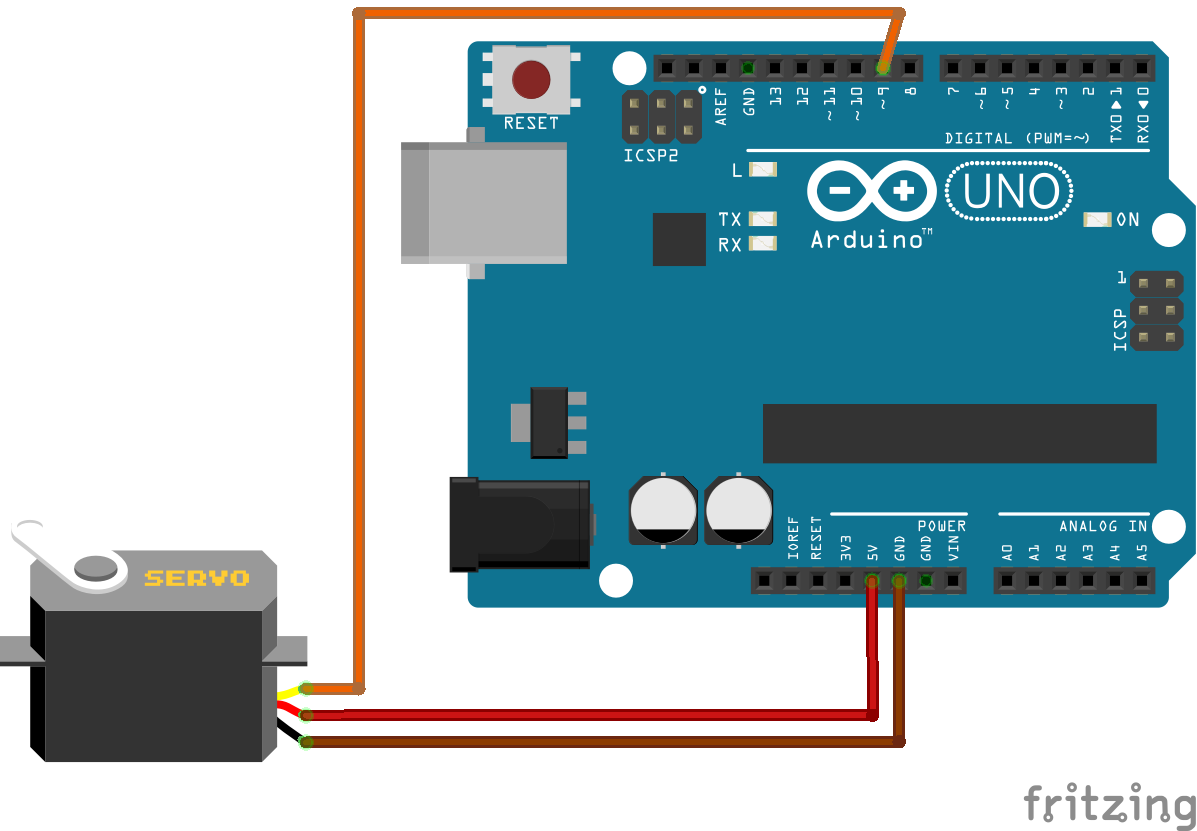
Stap 2:Hardware-installatie
Onderdelen



Opmerking:het breakout-bord wordt op dit moment niet verkocht. Raadpleeg hier
Montage



Inschakelen

Stap 2:Download pyMata en Code
pyMata
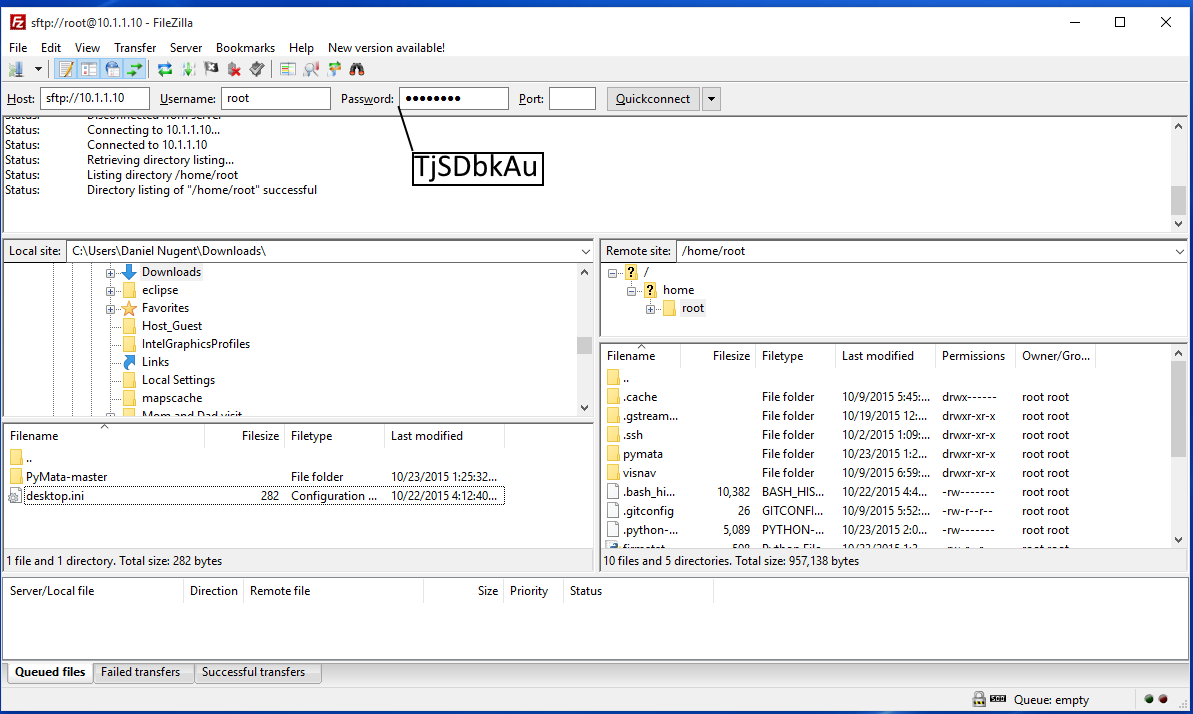
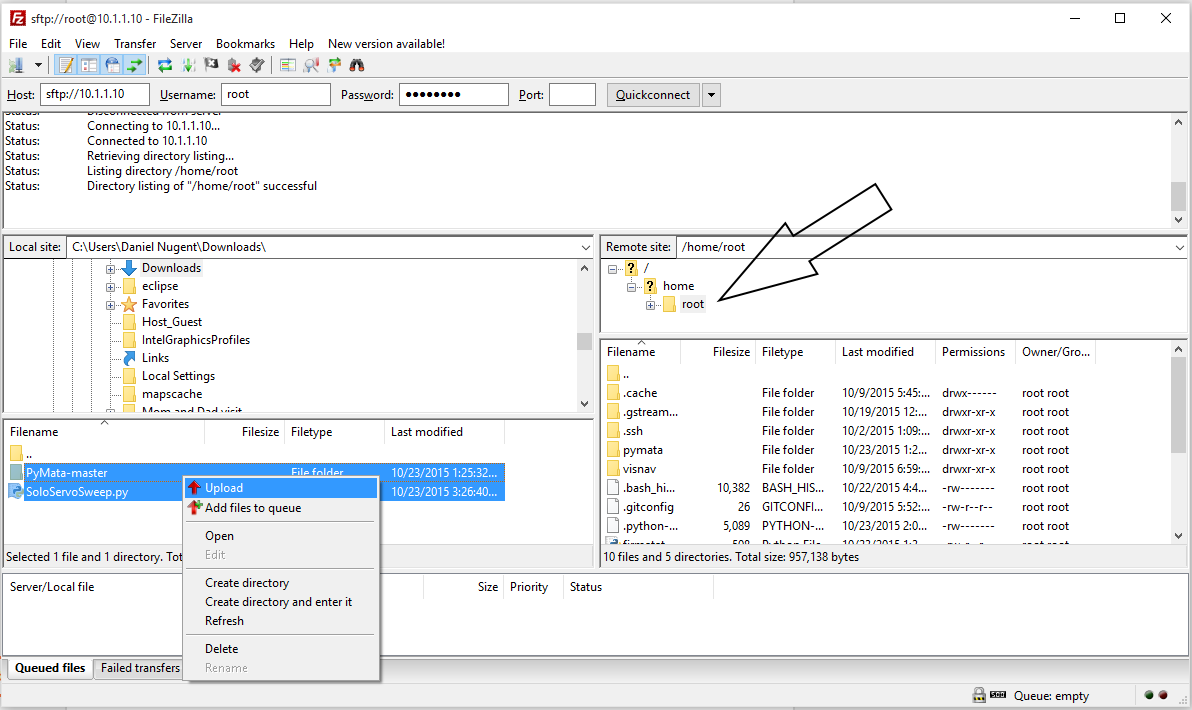
SoloServoSweep.pyStap 3:Breng bestanden over naar Solo
- Maak verbinding met het wifi-netwerk van je Solo!
Stap 4:SSH naar Solo
SSH in Solo met behulp van de SSH-client van uw besturingssysteem. Voor Windows gebruiken we Putty.
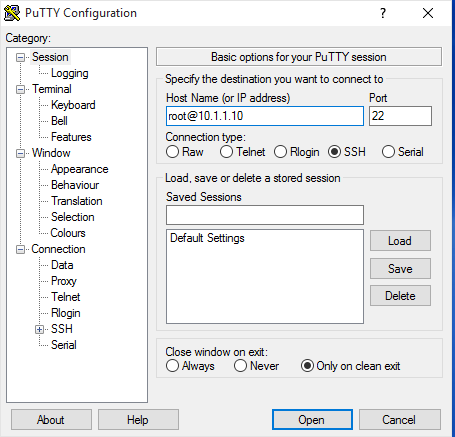
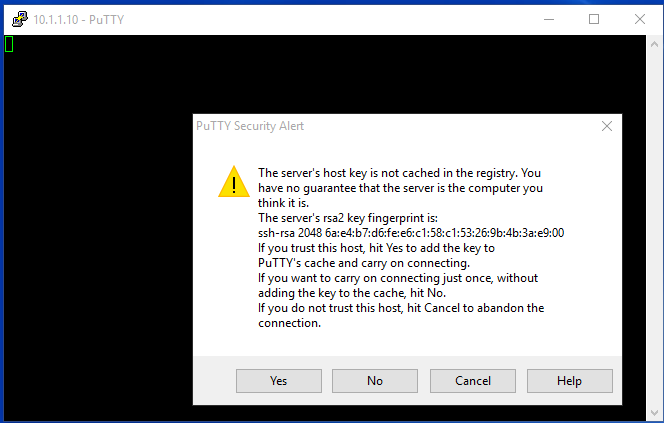
Zorg ervoor dat je nog steeds verbonden bent met Solo's Wifi!
Bekijk de bijschriften van de foto's voor meer details
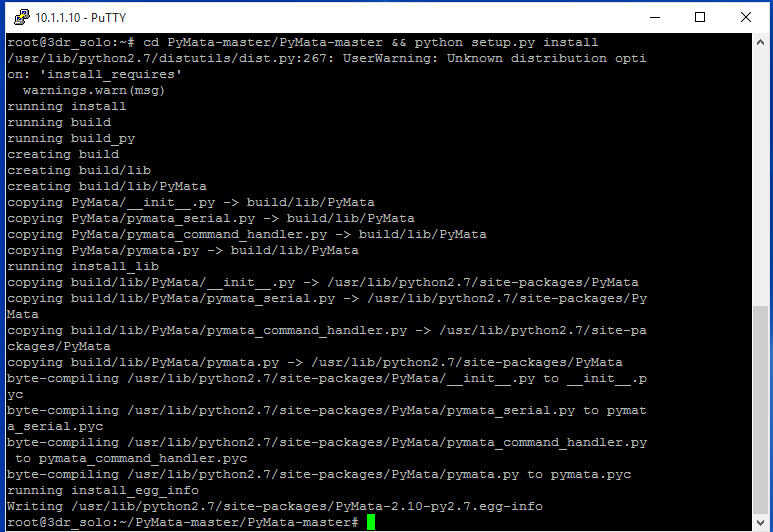
Stap 5:installeer pyMata
Voer deze opdracht uit in uw SSH-sessie:
Dit zou je resultaat moeten zijn
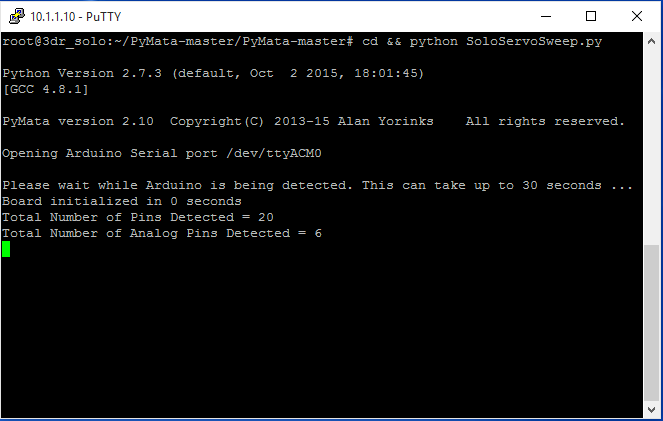
Stap 7:Voer het voorbeeld uit
Terwijl je ssh-sessie nog open is, voer je het volgende uit:
Code
- SoloServoSweep.py
SoloServoSweep.pyPython
Stuur een servo in python van Solovan PyMata.pymata import PyMataimport timeimport sysSERVO_MOTOR =9 # servo bevestigd aan deze pinEND =170 # Max servo travel# maak een PyMata-instantiebord =PyMata("/dev/ttyACM0")# configureer pin as servoboard.servo_config(SERVO_MOTOR)try:while True:for i binnen bereik (0,END):# sweep up board.analog_write(SERVO_MOTOR, i) time.sleep(.015) for i binnen bereik (END,0,- 1):# sweep down board.analog_write(SERVO_MOTOR, i) time.sleep(.015)behalve KeyboardInterrupt:board.close() sys.exit() Aangepaste onderdelen en behuizingen
Solo Breakout Board
Breakout-bord voor 3DR Solo-accessoirepoorthttps://github.com/3drobotics/Pixhawk_OS_Hardware/tree/master/Accessory_Breakout_X1Schema's
Productieproces