


3D-geprinte stappenmotor
Componenten en benodigdheden
 |
| × | 1 | |||
| × | 6 | ||||
| × | 8 | ||||
| × | 4 | ||||
| × | 1 |
Over dit project
https://www.youtube.com/embed/v2FNUNALSTwIk kwam onlangs deze instructable van een 3D-geprinte DC-motor tegen en ik dacht dat ik een stap kon nemen verder; Letterlijk. Ik ontwierp deze stappenmotor met acht elektromagneten, zes neodymiummagneten, met een 3D-geprinte rotor en statorbehuizing. Dit is specifiek een stappenmotor met permanente magneet die in staat is tot 15 graden volledige stappen en 7,5 graden halve stappen. Er zijn veel verschillende soorten stappenmotoren, maar de meeste werken erg op degene die ik hier heb ontworpen. Dit is een educatief display om anderen te laten zien hoe stappenmotoren werken. Ik heb dit ontworpen om op een 5-12VDC-voeding te werken, dus het werkt met de meeste USB-voedingen.
Ik doe ook een weggeefactie op mijn YouTube-kanaal. Ik zal een arduino weggeven, transistors die in dit project worden gebruikt, en enkele schakelaars. Meer details in de laatste stap.
Stap 1:Wat heb je nodig
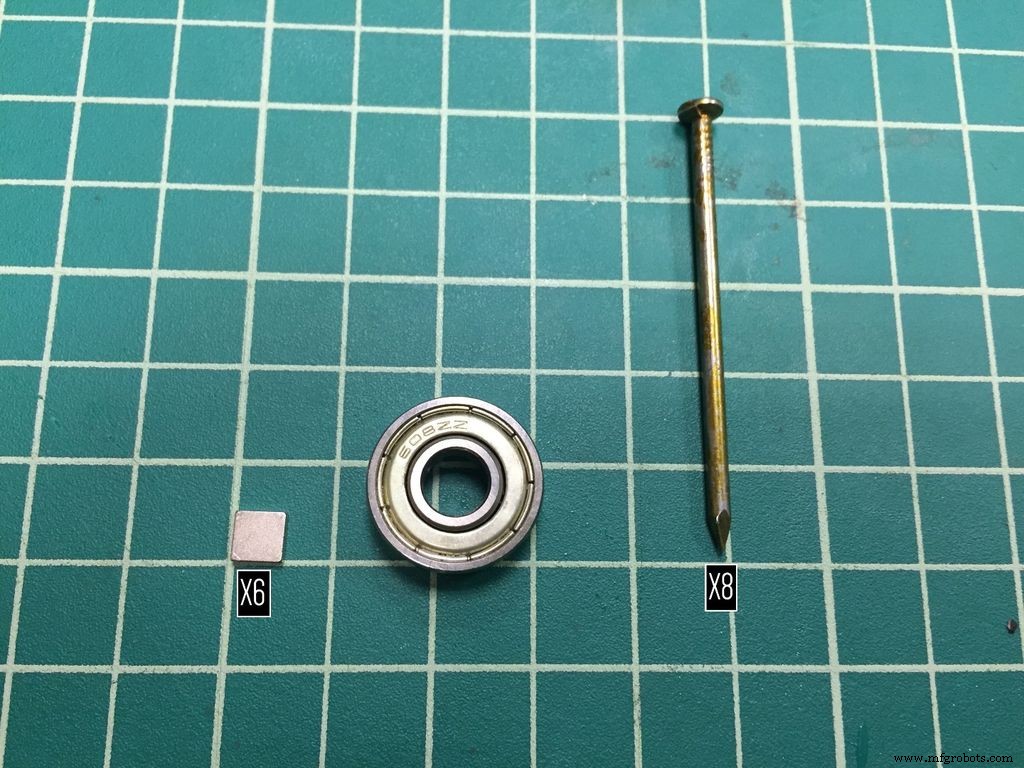


- Zes 1/4" neodymium magneten
- 608ZZ-lager:
- Acht 8d 2-3/8 "nagels - Het is niet belangrijk welke nagels je gebruikt, zolang ze maar passen.
- Magneetdraad - Ik heb magneetdraad van 0,315 mm gebruikt, maar dit is niet essentieel.
- Arduino Uno
- Vier transistoren - Ik gebruikte PNP-transistoren die ik had liggen, maar je kunt elke gewenste transistor of MOSFET gebruiken, zolang je maar zeker weet dat ze de stroom aankunnen die je motor zal trekken. Lees de datasheet aandachtig door voor specifieke aanbevelingen. Op 5v trekt de mijnmotor ongeveer 1 ampère en op 12v ongeveer 3 ampère.
- 3D-geprinte rotor en stator
- Lijm
- Elektrische tape
- Een kompas
Stap 2:Print de twaalfhoekrotor en achthoekige stator
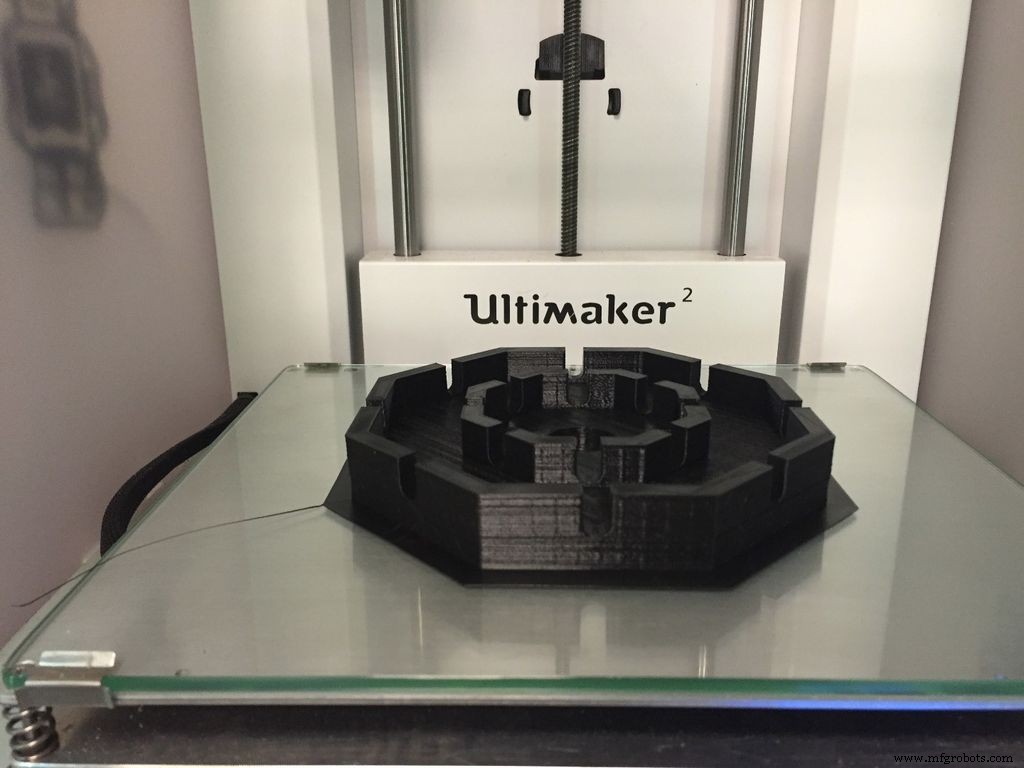
Print met 3D Hubs!
Stap 3:



Gebruik een kompas om de polen van je magneten te bepalen en lijm de magneten met de noordpolen naar buiten gericht. Als je magneten sterk genoeg zijn, zal het kompas op sommige smartphones je de polariteit van de magneten laten zien.
Stap 4:
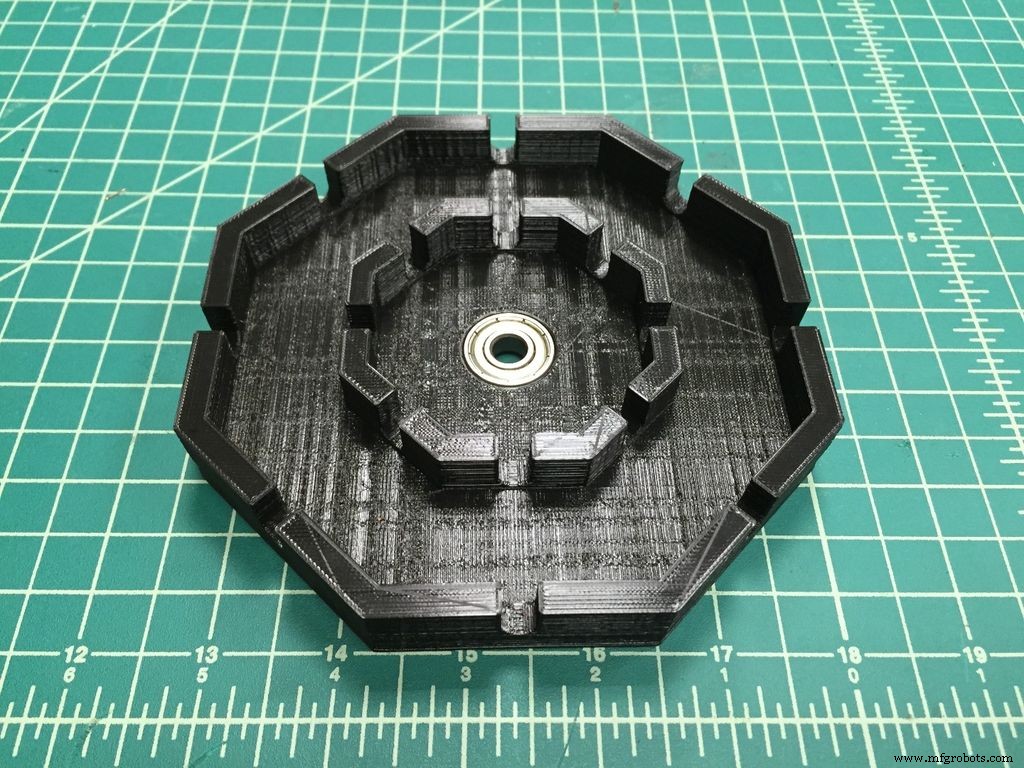

Druk het lager in de stator en druk vervolgens de rotor in het lager. Ik was aangenaam verrast hoe goed de lagerpers in de stator paste. Bij 3D-printen hebben gaten de neiging om naar binnen te krimpen en kleiner te worden dan verwacht, dus ik maak ze meestal een beetje groter.
Stap 5:
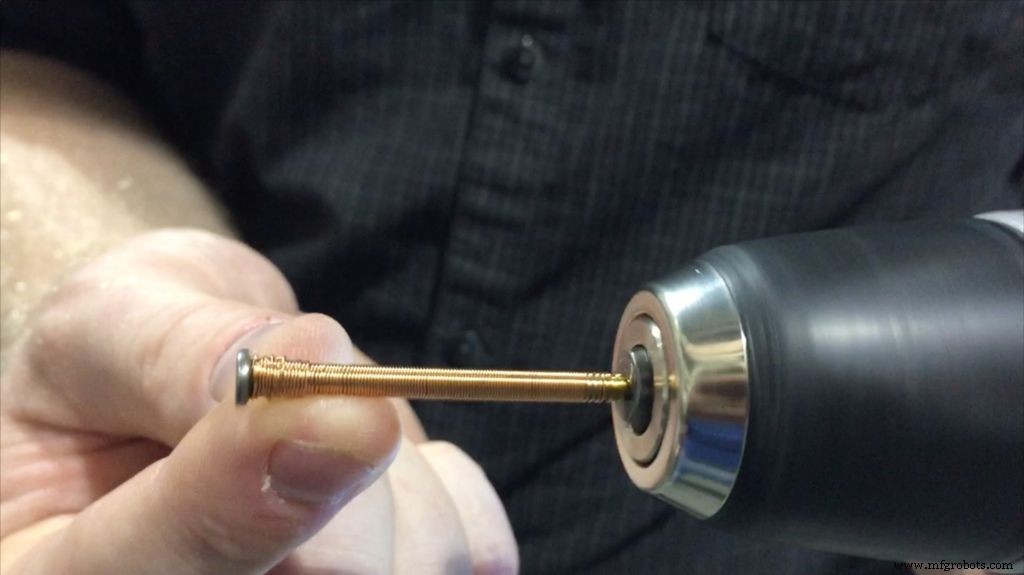

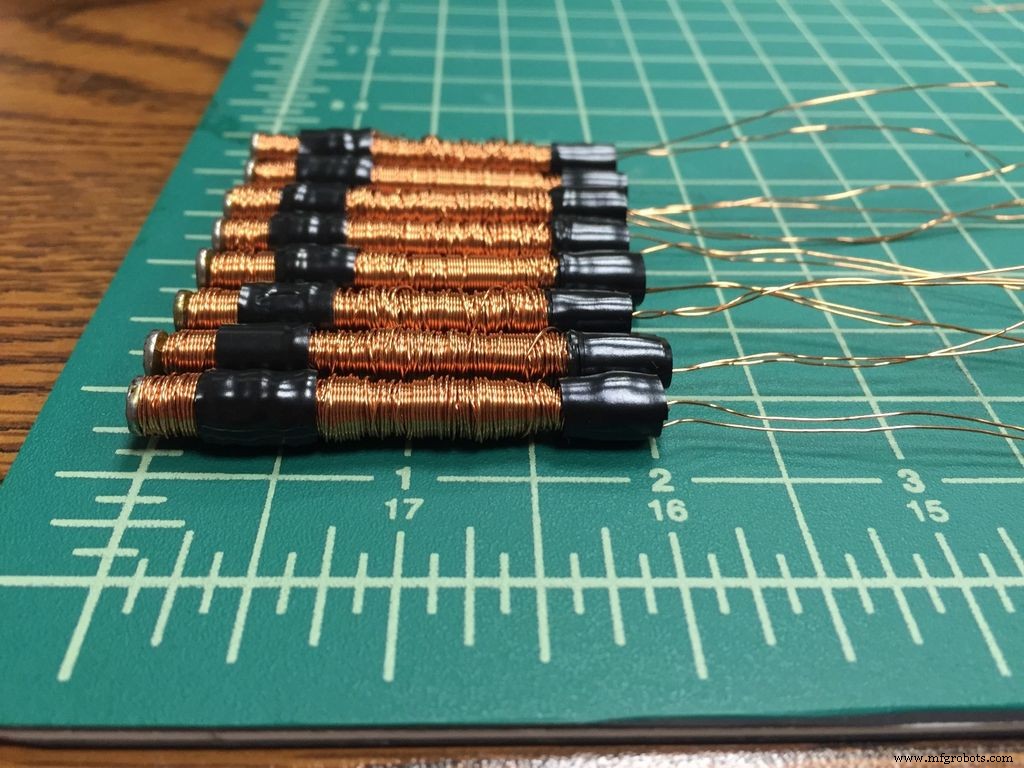
Knip 9 stukken draad af tot 25 voet en wind ze op met een boormachine. Gebruik een kompas en een batterij om de configuratie te bepalen die nodig is om u de zuidpool aan de top van de spijker te geven. Gebruik een marker of krimpkous om de negatieve draad van uw elektromagneten te markeren. Wikkel de secties van de elektromagneten met isolatietape waar ze in contact komen met de statorbehuizing. Dit dient twee doelen. Het houdt de elektromagneten stevig op hun plaats en isoleert de behuizing ook tegen eventuele warmte die de spoel kan produceren. De spoelparen trekken ongeveer 1 ampère met de 5V-voeding die ik gebruik. De transistoren die ik heb gekozen, kunnen een 12V-voeding gebruiken waarvan de spoelen ongeveer 3 ampère trekken. Het probleem met de hogere voedingsspanning is dat als ik hem een tijdje laat draaien, de spoelen warm beginnen te worden.
Waarschuwing:
Ik heb dit ontworpen om te werken op een 5-12VDC voeding. Als je besluit om buiten de gebaande paden te gaan, gebruik dan de wet van Ohm om te bepalen welke maat coils je wilt. V =I*R
Onthoud dat hoe minder windingen op uw spoel, hoe lager de weerstand zal zijn. Als je niet voorzichtig bent, zullen je spoelen meer stroom trekken dan je voeding of transistors aankunnen en zullen er slechte dingen gebeuren.
Stap 6:
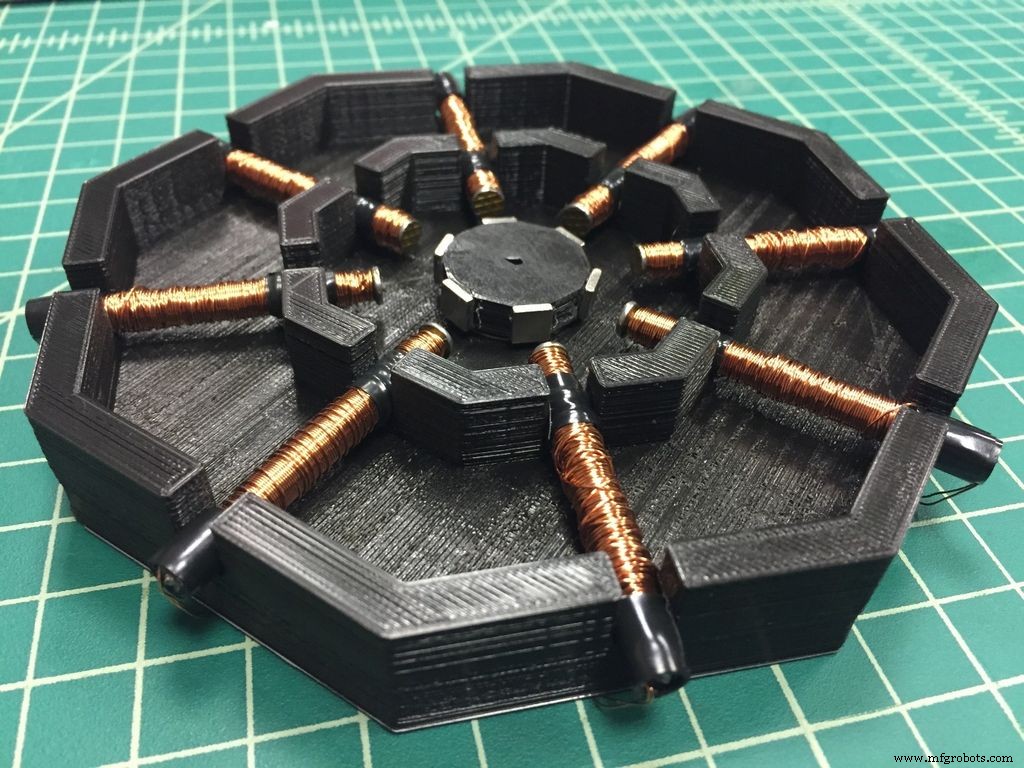
Duw de elektromagneten in de stator totdat ze ongeveer 1/4 "van de neodymiummagneten verwijderd zijn. Je kunt de elektromagneten in- en uitschuiven zoals je wilt, maar ik wilde ze niet te dichtbij omdat de spijkers veel sneller gemagnetiseerd worden. Dat is het nadeel van het gebruik van de spijkers. De motor werkt nog steeds als ze gemagnetiseerd zijn, maar het zal minder efficiënt zijn. Lasstaven zijn een goed alternatief voor de spijkers als je wat rondslingert.
Stap 7:soldeer alles samen
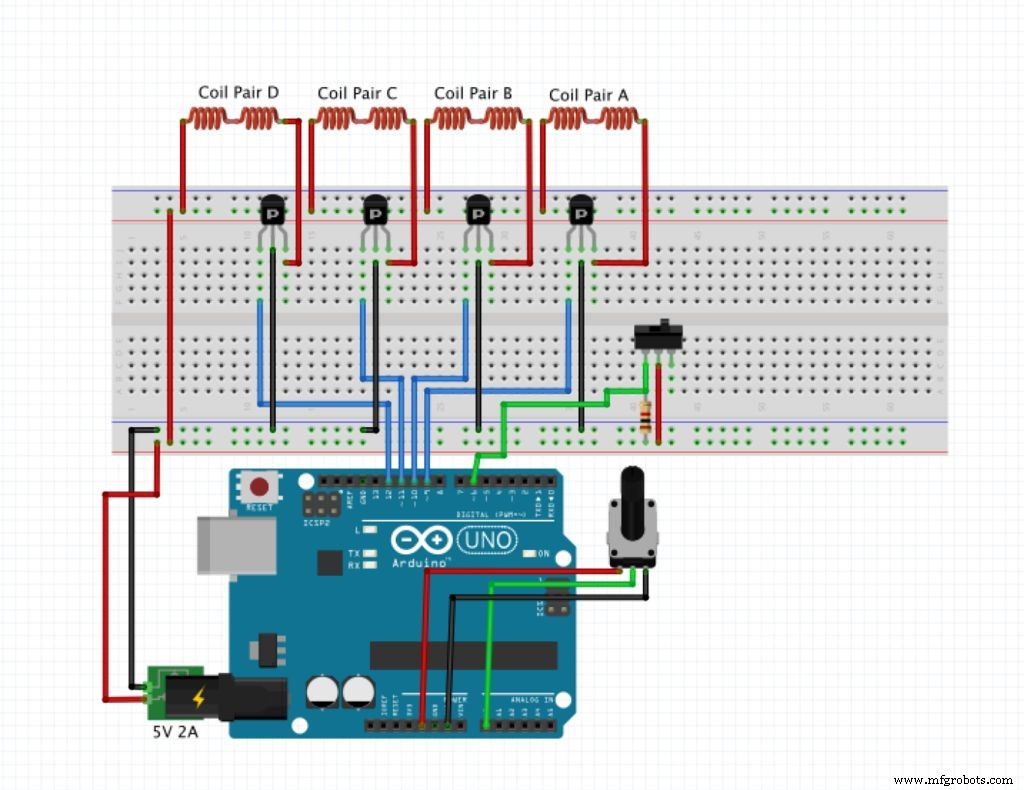
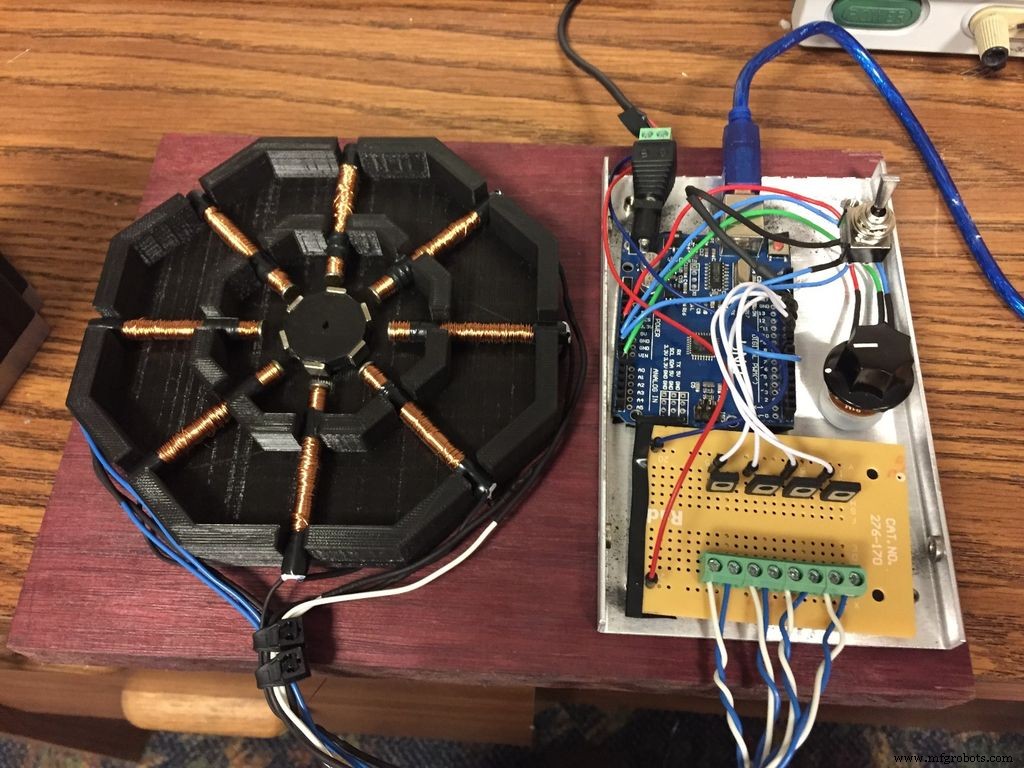
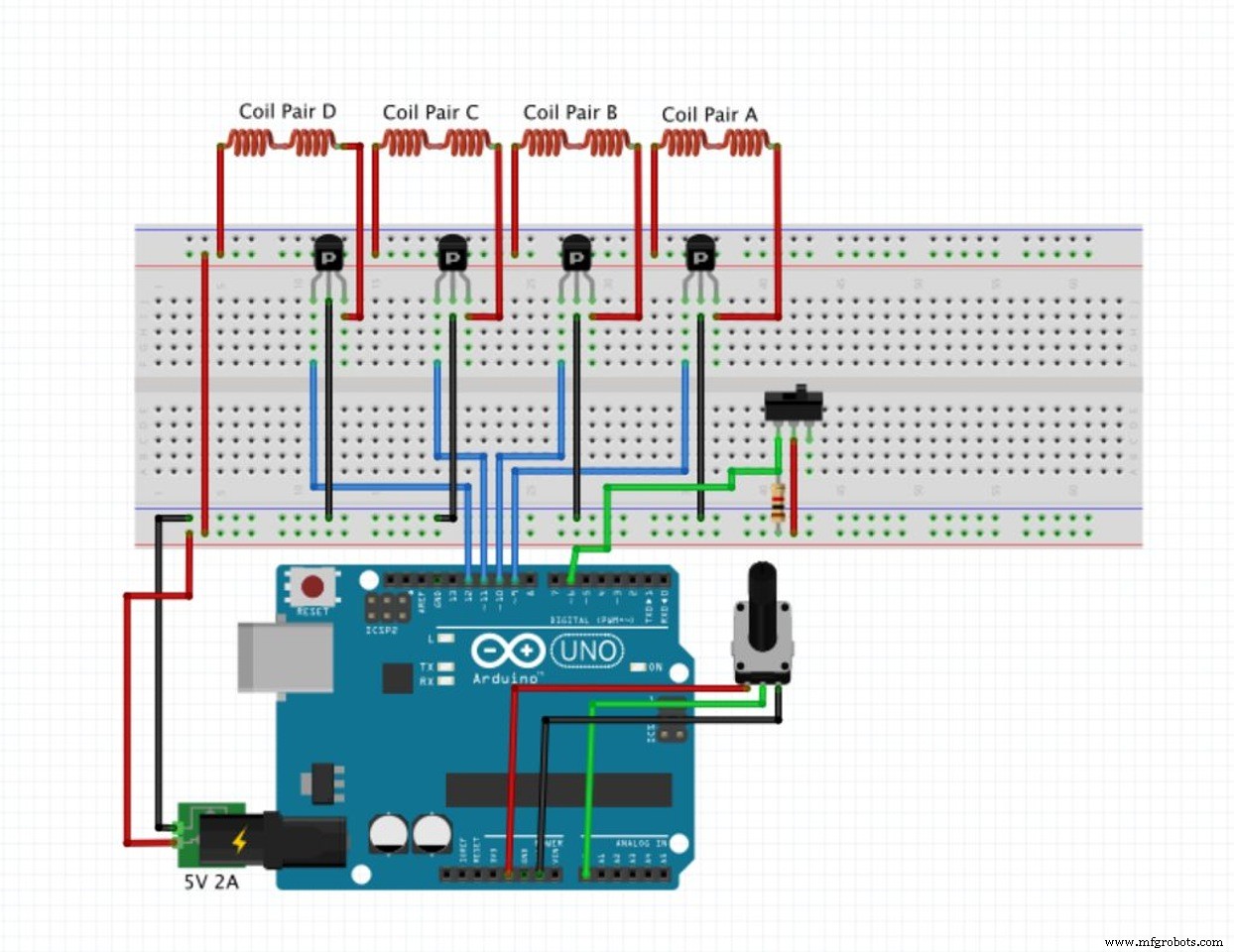
Sluit uw spoelparen in serie aan en sluit ze zo aan dat alle zuidpolen van de elektromagneten naar binnen wijzen. De weerstand die ik in het schema heb gebruikt, is een weerstand van 1k. Het doel hiervan is om te voorkomen dat de digitale pin hoog "zweeft" in de uit-stand. Nogmaals, zorg ervoor dat u een transistor gebruikt die in staat is om de stroom aan te kunnen die uw spoelen zullen eisen.
Laad de broncode naar je arduino en je bent klaar om te gaan!
Stap 8:Betaal het vooruit!

Ik zal een Arduino weggeven, de transistors die in dit project worden gebruikt, samen met enkele schakelaars en jumperdraden.
Regels voor de winactie:
Abonneer je op mijn YouTube-kanaal, zoals deze video en laat een reactie achter op de video waarin je aangeeft wat je mij de volgende keer zou willen zien bouwen. Op 1 september zal ik willekeurig de reactie van een abonnee selecteren en deze gratis verzenden! Bedankt jongens dat jullie zo'n gastvrije gemeenschap zijn!
Code
- Printed_Stepper_Motor.ino
Printed_Stepper_Motor.inoPlatte tekst
/*0101000001110010011011110111010001101111100100000010001113D Gedrukte stappenmotor Gemaakt op 15 augustus 2015 Gewijzigd op 15 augustus 2015 door Anthony Garofalo (Proto G)Bezoek mijn YouTube-kanaal hier:https://www.youtube.com/channel/UCpTuKJrXFwybnpOG7HpTpZwtablesit my Inch /www.instructables.com/member/Proto+G/ _____ ______ _____ _______ _____ ______ |_____] |_____/ | | | | | | ____ | | \_ |_____| | |_____| |_____| 010100000111001001101111011101000110111110010000001000111 */int Delay;int reverseSwitch;void setup() {// initialiseer digitale pin 13 als een output. pinMode(9, UITGANG); pinMode (10, UITGANG); pinMode (11, UITGANG); pinMode (12, UITGANG); pinMode(13, UITGANG); // led-pin voor visuele pinMode (6, INPUT); // tuimelschakelaar is aangesloten op digitale pin 6 voor het omkeren van de richting }void loop() {reverseSwitch =digitalRead (6); if (reverseSwitch ==HIGH){//als de reverse-schakelaar hoog is, draait u de rotor tegen de klok in Delay =analogRead (0); Vertraging =kaart (Vertraging, 0, 1023, 60, 2000); digitalWrite (12, HOOG); digitalWrite(13, HOOG); vertraging (Vertraging); digitalWrite (12, LAAG); digitalWrite(13, LAAG); vertraging (5); Vertraging =analoog lezen (0); Vertraging =kaart (Vertraging, 0, 1023, 60, 2000); digitalWrite (11, HOOG); vertraging (Vertraging); digitalWrite (11, LAAG); vertraging (5); Vertraging =analoog lezen (0); Vertraging =kaart (Vertraging, 0, 1023, 60, 2000); digitalWrite (10, HOOG); digitalWrite(13, HOOG); vertraging (Vertraging); digitalWrite (10, LAAG); digitalWrite(13, LAAG); vertraging (5); Vertraging =analoog lezen (0); Vertraging =kaart (Vertraging, 0, 1023, 60, 2000); digitalWrite(9, HOOG); vertraging (Vertraging); digitalWrite(9, LAAG); vertraging (5); } else{// als de achteruitschakelaar niet hoog staat, draait u de rotor met de klok mee Delay =analogRead (0); Vertraging =kaart (Vertraging, 0, 1023, 60, 2000); digitalWrite(9, HOOG); digitalWrite(13, HOOG); vertraging (Vertraging); digitalWrite(9, LAAG); digitalWrite(13, LAAG); vertraging (5); Vertraging =analoog lezen (0); Vertraging =kaart (Vertraging, 0, 1023, 60, 2000); digitalWrite (10, HOOG); vertraging (Vertraging); digitalWrite (10, LAAG); vertraging (5); Vertraging =analoog lezen (0); Vertraging =kaart (Vertraging, 0, 1023, 60, 2000); digitalWrite (11, HOOG); digitalWrite(13, HOOG); vertraging (Vertraging); digitalWrite (11, LAAG); digitalWrite(13, LAAG); vertraging (5); Vertraging =analoog lezen (0); Vertraging =kaart (Vertraging, 0, 1023, 60, 2000); digitalWrite (12, HOOG); vertraging (Vertraging); digitalWrite (12, LAAG); vertraging (5); } } Aangepaste onderdelen en behuizingen
Schema's
Productieproces
- Reluctantiemotor
- Stappenmotoren
- Printplaat
- Geïntegreerde drivers vereenvoudigen het ontwerp van de stappenmotor
- Raspoulette-prototype
- Autonome Nerf Sentry-toren
- Bipolaire stappenmotorbibliotheek
- Swiper - Auto Tinder/Bumble Swiper
- Het grijze gebied tussen servo- en stappenmotoren
- Wat is een lineaire motor?
- Wat is een servomotor?