


Swiper - Auto Tinder/Bumble Swiper
Componenten en benodigdheden
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Apps en online services
 |
|
Over dit project
Achtergrondverhaal
Mijn vrienden hebben een Tinder voor me gemaakt en zoals de meeste mensen in de app, viel ik al snel tegen door hoe eentonig het was. Toen realiseerde ik me dat ik een veel betere ingenieur was dan ik een potentiële partner was, dus ik heb dit in elkaar gezet uit een goedkope stappenmotor die ik had liggen. Dus nu kun je hiermee ook meer dan 800 swipes per uur krijgen op Bumble of Tinder!
Snel overzicht:
Er zijn drie snelle stappen voor deze build:de onderdelen printen, bedrading + testen van de stappenmotor en alles in elkaar zetten.
Stap 1:De onderdelen afdrukken
Bekijk https://www.thingiverse.com/thing:2849598 voor de 3D-afdrukbare bestanden. Het belangrijkste om op te merken over deze bestanden is dat ik 50% vulling heb gebruikt om de basis te maken, dit is om de basis te verzwaren zodat deze niet beweegt tijdens het vegen.
Stap 2:De stappenmotor
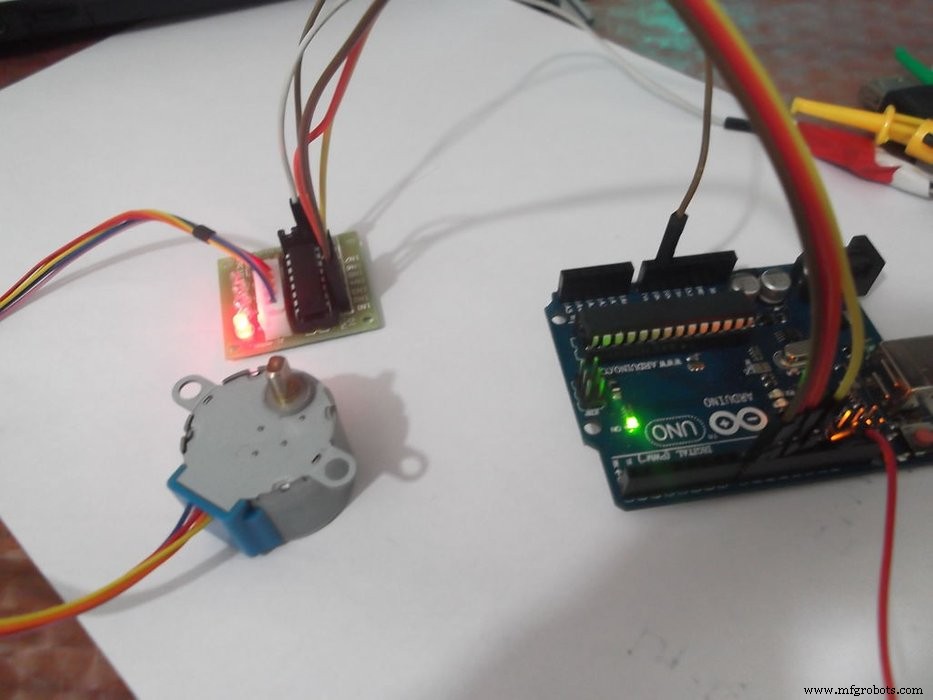
Ik gebruikte een unipolaire 28-BYJ48 stappenmotor en een SBT0811 stappenmotor driver. Elke stappenmotordriver die met de 28-BYJ48 werkt, zou in orde moeten zijn, zorg er gewoon voor dat je hem aansluit op je Arduino Uno volgens de volgende instellingen, of verander de code om je wijzigingen weer te geven:
- IN1>> D8
- IN2>> D9
- IN3>> D10
- IN4>> D11
- VCC>> 5V
- Gnd>> Grond
De code voor de Arduino Uno staat onderaan de pagina. Op dit punt zou je in staat moeten zijn om de code gewoon naar je Arduino te uploaden en een met de klok mee draaiende stappenmotor te hebben! Als je de richting wilt veranderen om tegen de klok in te draaien, verander dan gewoon de Richting variabele naar false

Stap 3:Alles bij elkaar plaatsen
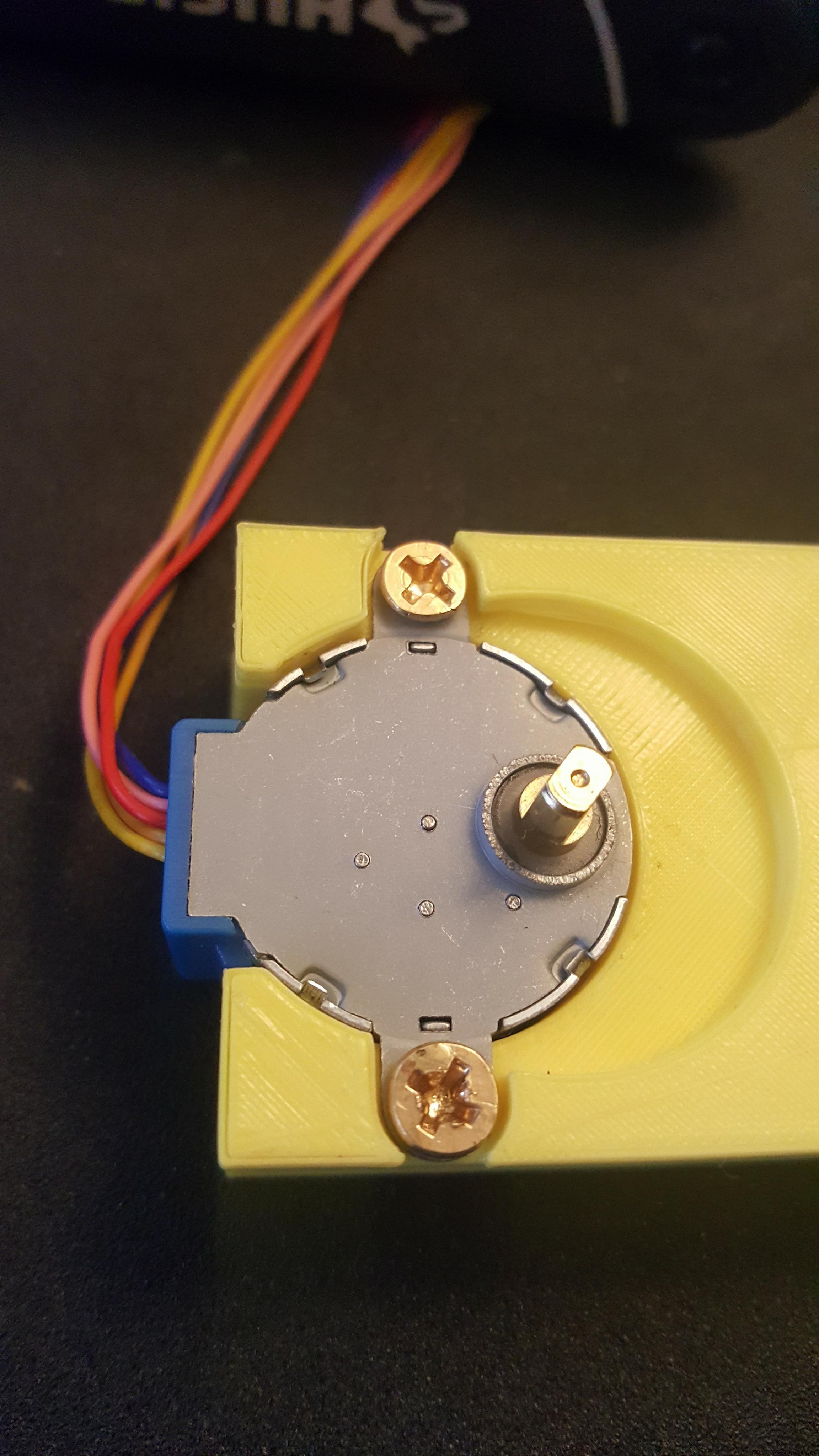
Op dit punt heb je alle losse onderdelen klaar en hoeven we ze alleen nog maar te combineren! Ga je gang en plaats eerst je stappenmotor in de swiper-base. Ik heb twee kleine houtschroeven gebruikt om het in de 3D-print te bevestigen.
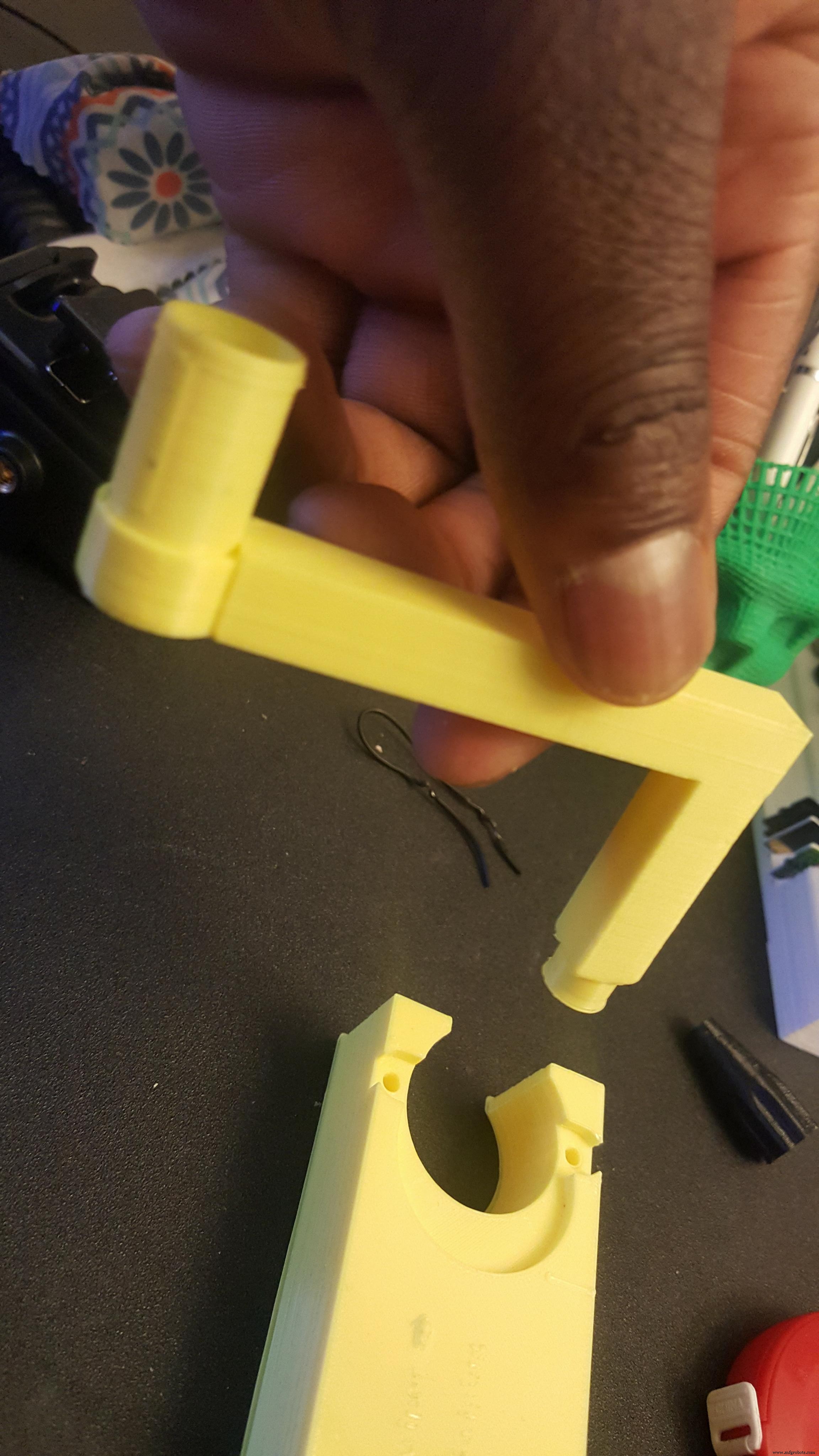
Ga daarna verder en plaats de swiperhendel op de stappenmotor.
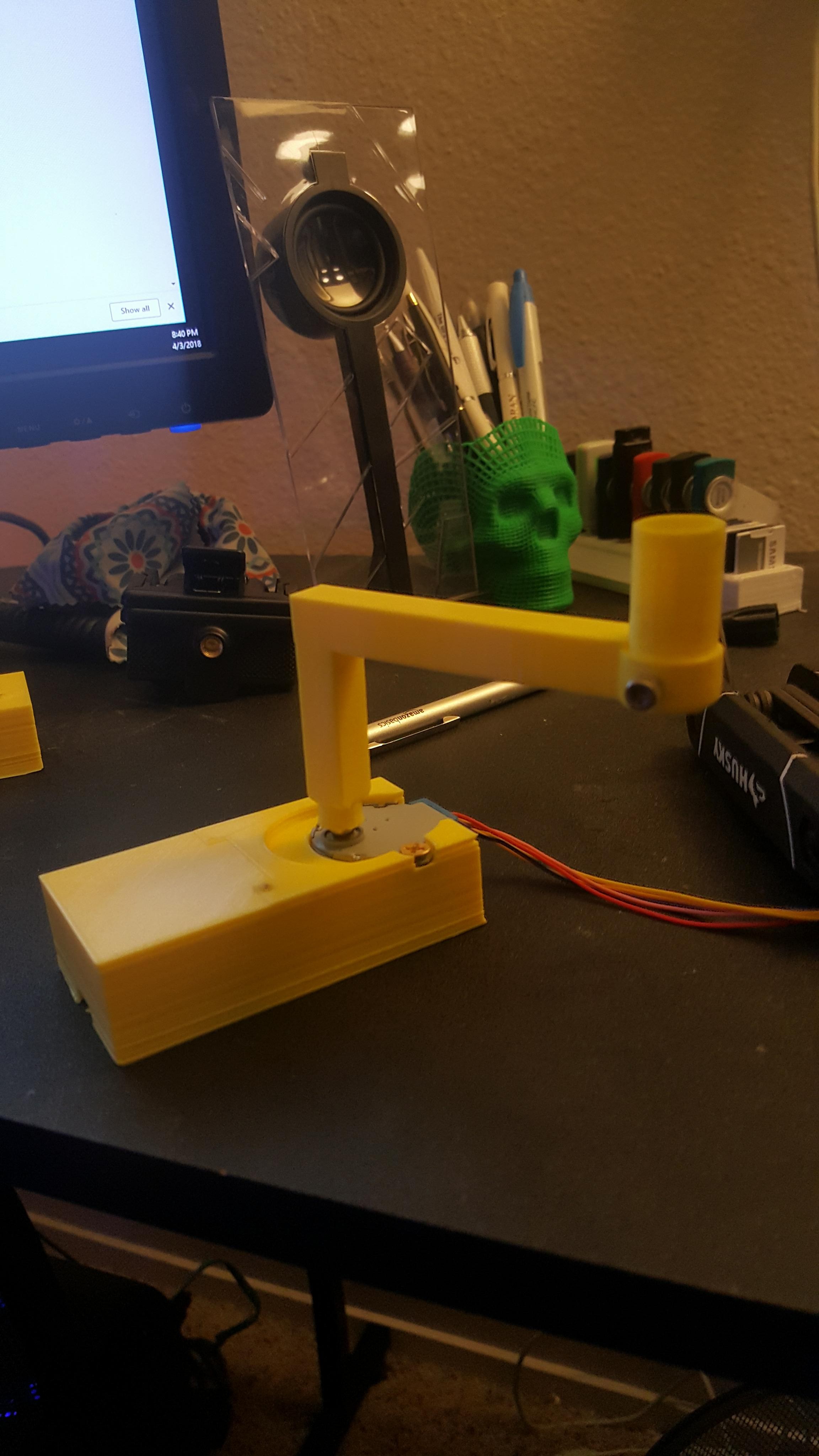
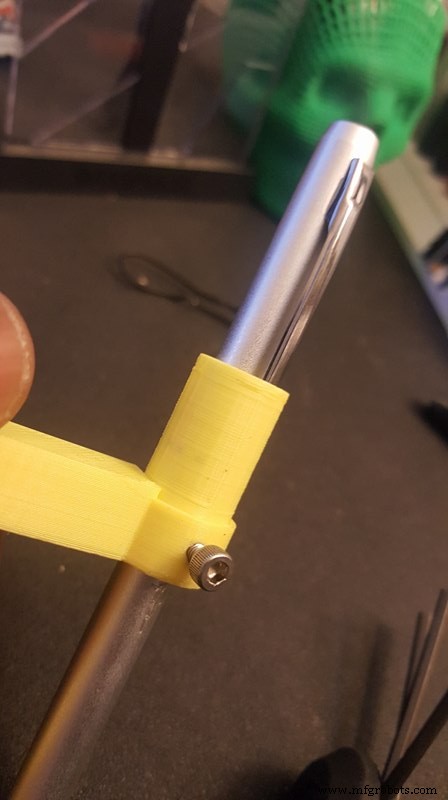
Om de hoogte te kalibreren; plaats de hele structuur boven een telefoon en plaats de touchscreen-pen in de swiperhandgreep totdat de touchscreen-pen het scherm raakt.

Op dit punt ga je gang en pak je een korte M3-schroef en zet je je touchscreen-pen vast zodat deze niet beweegt tijdens het vegen.
Eindelijk kunnen vegen
Plaats de hele structuur naast de telefoon, open de gewenste dating-app, draai de Arduino-app en leun achterover!
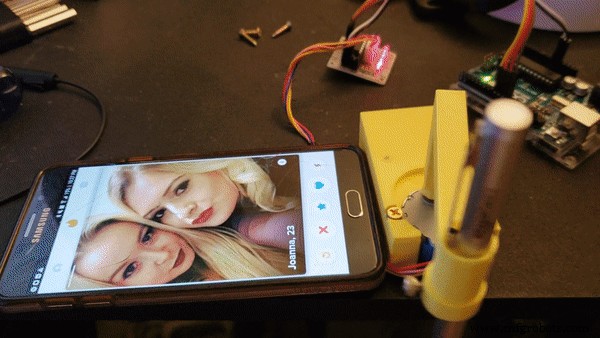
Ik heb dit getest op 4 verschillende telefoons en een van de telefoons had problemen met het correct registreren van de swipes en ging naar het vorige scherm. Dit komt omdat de rand van de laatst geteste telefoon behoorlijk gevoelig was, dit kun je oplossen door je telefoon in een hoesje met een opstaande rand te plaatsen, dan registreert de touchscreen pen zich niet aan de rand van het scherm.
Code
- Swiper
SwiperArduino
Change Direction =false to true als je de veegrichting wilt veranderen!/* BYJ48 Stappenmotor code Connect:IN1>> D8 IN2>> D9 IN3>> D10 IN4>> D11 VCC>> 5V Gnd geschreven door:Mohannad Rawashdeh https://www.instructables.com/member/Mohannad+Rawashdeh/ 28/9/2013 */#define IN1 8#define IN2 9#define IN3 10#define IN4 11int Steps =0;boolean Direction =false; // verander naar true voor rechts swipeunsigned long last_time; unsigned long currentMillis;int steps_left=4095;long time;void setup(){Serial.begin(115200);pinMode(IN1, OUTPUT); pinMode (IN2, UITGANG); pinMode (IN3, UITGANG); pinMode (IN4, UITGANG); // delay(1000);}void loop(){ while(steps_left>0){ currentMillis =micros(); if(currentMillis-last_time>=1000){ stepper(1); tijd=tijd+micros()-laatste_tijd; last_time=micros(); stappen_links--; } } steps_left=4095;}void stepper(int xw){ for (int x=0;x7){Stappen=0;}if(Stappen<0){Stappen=7; }} Productieproces
- Stappenmotoren
- Geïntegreerde drivers vereenvoudigen het ontwerp van de stappenmotor
- Raspoulette-prototype
- Simple Pi Robot
- Autonome Nerf Sentry-toren
- Bipolaire stappenmotorbibliotheek
- SmartWay
- Op stappen gebaseerde roterende standaard bestuurd door seriële dialoog
- Het grijze gebied tussen servo- en stappenmotoren
- Wat is een lineaire motor?
- Wat is een servomotor?