


Wat is een stappenmotor? Types, constructie, bediening en toepassingen
Soorten stappenmotoren - hun constructie, werking en toepassingen
De uitvinding van speciale stappenmotor-stuurprogrammakaarten en andere digitale besturingstechnologieën voor het koppelen van een stappenmotor naar pc-gebaseerde systemen zijn de reden voor de wijdverbreide acceptatie van stappenmotoren in de afgelopen tijd. Stappenmotoren worden de ideale keuze voor automatiseringssystemen die nauwkeurige snelheidsregeling of nauwkeurige positionering of beide vereisen.
Zoals we weten dat veel industriële elektromotoren worden gebruikt met terugkoppelingsregeling met gesloten lus voor het bereiken van nauwkeurige positionering of nauwkeurige snelheidsregeling, kan aan de andere kant een stappenmotor werken op een open-loop-controller. Dit verlaagt op zijn beurt de totale systeemkosten en vereenvoudigt het machineontwerp in vergelijking met servosysteembesturing. Laten we het kort hebben over stappenmotor en zijn typen . 
- Gerelateerde post:servomotor - typen, constructie, werking en toepassingen
Wat is een stappenmotor?
Stappenmotor is een borstelloos elektromechanisch apparaat dat de reeks elektrische pulsen die op hun excitatiewikkelingen wordt toegepast, omzet in nauwkeurig gedefinieerde stapsgewijze mechanische asrotatie. De as van de motor draait voor elke discrete puls over een vaste hoek. Deze rotatie kan lineair of hoekig zijn. Het krijgt een stapbeweging voor een enkele pulsinvoer.
Wanneer een reeks pulsen wordt toegepast, wordt deze over een bepaalde hoek gedraaid. De hoek waarover de as van de stappenmotor voor elke puls draait, wordt de staphoek genoemd, die over het algemeen wordt uitgedrukt in graden.
Het aantal ingangspulsen dat aan de motor wordt gegeven, bepaalt de staphoek en daarom wordt de positie van de motoras geregeld door het aantal pulsen te regelen. Deze unieke eigenschap maakt de stappenmotor zeer geschikt voor open-loop besturingssystemen waarbij de precieze positie van de as wordt gehandhaafd met exact aantal pulsen zonder gebruik te maken van een feedbacksensor.
Als de staphoek kleiner is, zal het aantal stappen per omwenteling groter zijn en zal de nauwkeurigheid van de verkregen positie hoger zijn. De staphoeken kunnen zo groot zijn als 90 graden en zo klein als 0,72 graden, maar de meest gebruikte staphoeken zijn 1,8 graden, 2,5 graden, 7,5 graden en 15 graden.
De richting van de asrotatie hangt af van de reeks pulsen die op de stator worden toegepast. De snelheid van de as of de gemiddelde motorsnelheid is recht evenredig met de frequentie (de snelheid van ingangspulsen) van ingangspulsen die worden toegepast bij excitatiewikkelingen. Daarom, als de frequentie laag is, roteert de stappenmotor in stappen en voor hoge frequenties draait hij continu als een gelijkstroommotor vanwege traagheid.
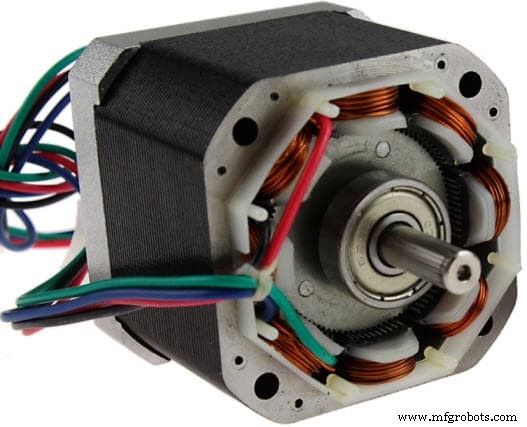
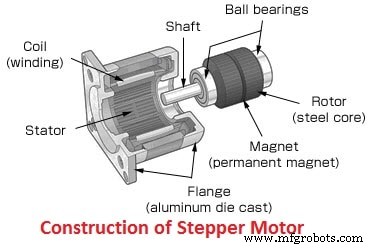
Zoals alle elektromotoren heeft hij stator en rotor. De rotor is het beweegbare deel dat geen wikkelingen, borstels en een commutator heeft. Gewoonlijk zijn de rotoren ofwel van het type met variabele reluctantie of van een permanente magneet. De stator is vaak geconstrueerd met meerpolige en meerfasige wikkelingen, meestal van drie- of vierfasige wikkelingen die zijn gewikkeld voor een vereist aantal polen, bepaald door de gewenste hoekverplaatsing per ingangspuls.
In tegenstelling tot andere motoren werkt het op geprogrammeerde discrete stuurpulsen die via een elektronische aandrijving op de statorwikkelingen worden toegepast. De rotatie vindt plaats vanwege de magnetische interactie tussen de polen van de sequentieel bekrachtigde statorwikkeling en de polen van de rotor.
Er zijn verschillende typen stappenmotoren zijn op de huidige markt verkrijgbaar in een breed scala aan maten, aantal stappen, constructies, bedrading, tandwieloverbrenging en andere elektrische kenmerken. Omdat deze motoren in staat zijn om discreet te werken, zijn ze zeer geschikt om te communiceren met digitale besturingsapparatuur zoals computers.
Vanwege de nauwkeurige regeling van snelheid, rotatie, richting en hoekpositie zijn deze van bijzonder belang in industriële procesbesturingssystemen, CNC-machines, robotica, productieautomatiseringssystemen en instrumentatie.
- Gerelateerde post:borstelloze gelijkstroommotor - constructie, werkingsprincipe en toepassingen
Soorten stappenmotoren
Er zijn drie basis categorieën stappenmotoren , namelijk
- Stappenmotor met permanente magneet
- Variabele Reluctantie Stappenmotor
- Hybride stappenmotor
In al deze motoren worden bekrachtigingswikkelingen gebruikt in de stator waarbij het aantal wikkelingen verwijst naar het aantal fasen.
Een gelijkspanning wordt toegepast als een bekrachtiging op de wikkelingen en elke wikkelklem is via een halfgeleiderschakelaar met de bron verbonden. Afhankelijk van het type stappenmotor, is het rotorontwerp geconstrueerd zoals een zachtstalen rotor met uitspringende polen, een cilindrische permanente magneetrotor en een permanente magneet met zachte stalen tanden. Laten we deze typen in detail bespreken.
- U kunt ook lezen:Driefasige motorverbinding ster/driehoek (Y-Δ) achteruit/vooruit met timer stroom- en regelschema
Variabele Reluctantie Stappenmotor
Het is het basistype stappenmotor dat bestaat al heel lang en het zorgt voor de gemakkelijkste manier om het werkingsprincipe vanuit een structureel oogpunt te begrijpen. Zoals de naam al doet vermoeden, hangt de hoekpositie van de rotor af van de weerstand van het magnetische circuit dat wordt gevormd tussen de statorpolen (tanden) en rotortanden.

Constructie van stappenmotor met variabele reluctantie
Het bestaat uit een gewikkelde stator en een zachtijzeren meertandige rotor. De stator heeft een stapel siliciumstalen lamellen waarop statorwikkelingen zijn gewikkeld. Gewoonlijk wordt het gewikkeld voor drie fasen die zijn verdeeld over de poolparen.
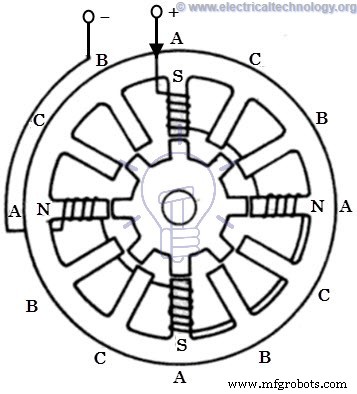
Het aantal polen op de stator dat zo wordt gevormd, is gelijk aan een even veelvoud van het aantal fasen waarvoor wikkelingen op de stator zijn gewikkeld. In de onderstaande afbeelding heeft de stator 12 op gelijke afstand van elkaar geplaatste uitstekende polen, waarbij elke pool is gewikkeld met een opwindende spoel. Deze drie fasen worden gevoed door een DC-bron met behulp van solid-state schakelaars.
De rotor heeft geen wikkelingen en is van het opvallende paaltype, volledig gemaakt van gegroefde stalen lamellen. De geprojecteerde tanden van de rotorpool hebben dezelfde breedte als die van de statortanden. Het aantal polen op de stator verschilt van dat van de rotorpolen, wat de mogelijkheid biedt om zelf te starten en de motor in twee richtingen te laten draaien.
De relatie van rotorpolen in termen van statorpolen voor een driefasige stappenmotor wordt gegeven als, Nr =Ns ± (Ns / q). Hier Ns =12, en q=3, en dus Nr =12 ± (12 / 3) =16 of 8. Een 8-polige constructierotor zonder enige bekrachtiging wordt hieronder geïllustreerd.
Werking van stappenmotor met variabele reluctantie
De stappenmotor werkt volgens het principe dat de rotor in een bepaalde positie uitgelijnd is met de tanden van de excitatiepool in een magnetisch circuit waarin een minimaal reluctantiepad bestaat. Telkens wanneer de motor van stroom wordt voorzien en door een bepaalde wikkeling te bekrachtigen, produceert deze zijn magnetisch veld en ontwikkelt hij zijn eigen magnetische polen.
Als gevolg van het resterende magnetisme in de rotormagneetpolen, zal dit ervoor zorgen dat de rotor in een zodanige positie beweegt dat een minimale reluctantiepositie wordt bereikt en dus één set rotorpolen uitgelijnd met de geactiveerde set polen van de stator. Op deze positie komt de as van het magnetische veld van de stator overeen met de as die door twee willekeurige magnetische polen van de rotor gaat.
Als de rotor uitgelijnd is met statorpolen, heeft deze voldoende magnetische kracht om te voorkomen dat de as naar de volgende positie beweegt, met de klok mee of tegen de klok in.
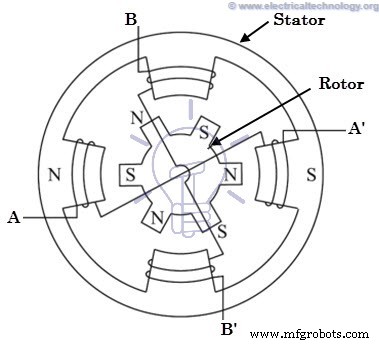
Beschouw het schematische diagram van een 3-fase, 6 statorpolen en 4 rotortanden in onderstaande afbeelding. Wanneer de fase A-A' wordt voorzien van een DC-voeding door de schakelaar -1 te sluiten, wordt de wikkeling een magneet waardoor de ene tand naar het noorden en de andere naar het zuiden wordt. Dus de magnetische as van de stator ligt langs deze polen.
Als gevolg van de aantrekkingskracht trekt de noordpool van de statorspoel de dichtstbijzijnde rotortand met tegengestelde polariteit aan, d.w.z. de zuid- en zuidpool trekken de dichtstbijzijnde rotortand met tegengestelde polariteit aan, d.w.z. het noorden. De rotor past zich vervolgens aan naar zijn minimale reluctantiepositie waarbij de magnetische as van de rotor exact overeenkomt met de magnetische as van de stator.
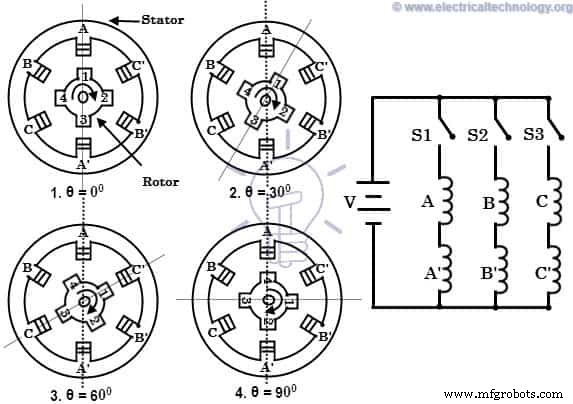
Wanneer de fase B-B' wordt geactiveerd door sluitschakelaar -2 terwijl fase A-A' spanningsloos blijft door schakelaar-1 te openen, zal wikkeling B-B' de magnetische flux produceren en dus verschuift de magnetische as van de stator langs de aldus gevormde polen. Daarom verschuift de rotor met de minste tegenzin met gemagnetiseerde statortanden en draait hij over een hoek van 30 graden met de klok mee.
Wanneer schakelaar-3 wordt geactiveerd na het openen van schakelaar-2, wordt de fase C-C' geactiveerd, de rotortanden worden uitgelijnd met de nieuwe positie door over een extra hoek van 30 te bewegen graden. Op deze manier beweegt de rotor met de klok mee of tegen de klok in door achtereenvolgens statorwikkelingen in een bepaalde volgorde te activeren. De staphoek van deze 3-fase 4-polige stappenmotor met rotortanden wordt uitgedrukt als 360/ (4 × 3) =30 graden (als staphoek =360 / Nr × q).
De staphoek kan verder worden verkleind door het aantal polen op de stator en rotor te vergroten, in dat geval worden motoren vaak gewikkeld met extra fasewikkelingen. Dit kan ook worden bereikt door een andere constructie van stappenmotoren te gebruiken zoals multistack-opstelling en reductietandwielmechanisme.
- U kunt ook lezen:Driefasige motoraansluiting STAR/DELTA zonder timer Stroom- en regelschema's
Stappenmotor met permanente magneet
De ontwerpmotor met permanente magneet is misschien wel de meest voorkomende van verschillende soorten stappenmotoren. Zoals de naam al aangeeft, voegt het permanente magneten toe aan de motorconstructie. Dit type stappenmotoren wordt ook wel can-stack motor genoemd of blikje motor . Het belangrijkste voordeel van deze motor zijn de lage productiekosten. Dit type motor heeft 48-24 stappen per omwenteling.

Constructie Permanente Magneet Stappenmotor
In deze motor is de stator multipolair en is de constructie vergelijkbaar met die van een stappenmotor met variabele reluctantie, zoals hierboven besproken. Het bestaat uit een gesleufde omtrek waarop statorspoelen zijn gewikkeld. Het heeft geprojecteerde palen op de sleufstructuur waar de gewikkelde wikkelingen twee- of drie- of vierfasig kunnen zijn.
De eindklemmen van al deze wikkelingen zijn uitgekocht en verbonden met de DC-bekrachtiging via solid-state schakelaars in het aandrijfcircuit.
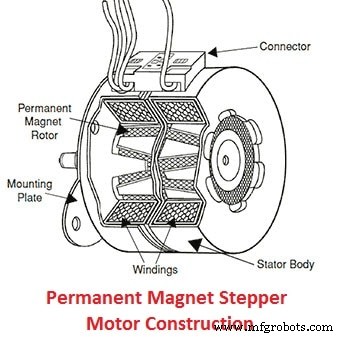
De rotor is gemaakt van permanent magneetmateriaal zoals een ferriet dat de vorm kan hebben van een cilindrische of uitspringende pool, maar meestal is het van het gladde cilindrische type. De rotor is ontworpen om een even aantal permanente magnetische polen te hebben met afwisselende noord- en zuidpolen.
Werking van stappenmotor met permanente magneet
De werking van deze motor werkt volgens het principe dat ongelijke polen elkaar aantrekken en gelijke polen elkaar afstoten. Wanneer de statorwikkelingen worden geëxciteerd met een gelijkstroomvoeding, produceert deze magnetische flux en stelt de noord- en zuidpool vast. Door de aantrekkingskracht en afstoting tussen permanent magneet rotorpolen en statorpolen, begint de rotor omhoog te bewegen naar de positie waarvoor pulsen aan de stator worden gegeven.
Overweeg een 2-fasen stappenmotor met twee permanent magnetische rotorpolen zoals weergegeven in de onderstaande afbeelding.
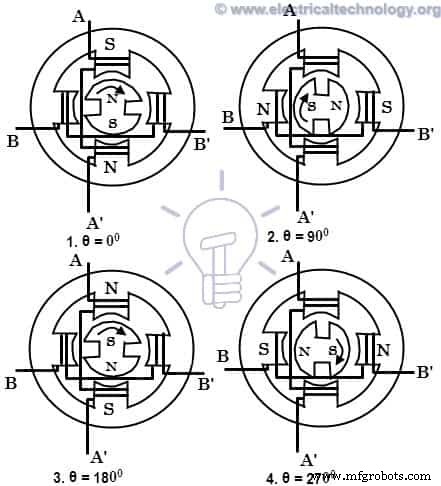
Wanneer fase A wordt geactiveerd met een positief met ten opzichte van de A' bepalen de windingen de Noord- en Zuidpool. Vanwege de aantrekkingskracht worden de rotorpolen uitgelijnd met de statorpolen, zodat de magnetische poolas van de rotor zich aanpast aan die van de stator, zoals weergegeven in de afbeelding.
Als de bekrachtiging wordt omgeschakeld naar fase B en fase A uitschakelt, past de rotor zich verder aan de magnetische as van fase B aan en draait dus 90 graden met de klok mee.
P>Als vervolgens fase A wordt bekrachtigd met een negatieve stroom ten opzichte van A', zorgt de vorming van statorpolen ervoor dat de rotor nog eens 90 graden met de klok mee beweegt.
Op dezelfde manier, als fase B wordt bekrachtigd met negatieve stroom door fase A-schakelaar te sluiten, draait de rotor nog eens 90 graden in dezelfde richting. Vervolgens, als de fase A wordt geëxciteerd met positieve stroom, komt de rotor naar de oorspronkelijke positie en maakt zo een volledige omwenteling van 360 graden. Dit houdt in dat, wanneer de stator wordt aangeslagen, de rotor de neiging heeft om 90 graden met de klok mee te draaien.
De staphoek van deze 2-fasen 2-polige permanentmagneetrotormotor wordt uitgedrukt als 360/ (2 × 2) =90 graden. De stapgrootte kan worden verkleind door twee fasen tegelijk te activeren of een reeks 1-fase AAN en 2-fase AAN-modi met de juiste polariteit.
- U kunt ook lezen:Termen en definities met betrekking tot motorbesturing en -bescherming
Hybride stappenmotor
Het is het populairste type stappenmotor omdat het betere prestaties levert dan de permanente magneetrotor in termen van stapresolutie, houdkoppel en snelheid. Deze motoren zijn echter duurder dan PM-stappenmotoren. Het combineert de beste eigenschappen van zowel variabele reluctantie als stappenmotoren met permanente magneet. Deze motoren worden gebruikt in toepassingen die een zeer kleine staphoek vereisen, zoals 1,5, 1,8 en 2,5 graden.

Bouw van hybride stappenmotor
De stator van deze motor is hetzelfde als zijn tegenhanger van het permanente magneet- of reluctantietype. De statorspoelen zijn op afwisselende polen gewikkeld. Hierin zijn de spoelen van verschillende fasen op elke pool gewikkeld, meestal twee spoelen op een pool die een bifilaire verbinding wordt genoemd.
De rotor bestaat uit een permanente magneet die in axiale richting wordt gemagnetiseerd om een paar magnetische polen (N- en S-polen) te creëren. Elke paal is bedekt met gelijkmatig verdeelde tanden. De tanden zijn gemaakt van zacht staal en twee secties, waarvan op elke paal een halve tandafstand op elkaar is uitgelijnd.
- Gerelateerde post Waarom elektrische motoren in kW in plaats van kVA?
Werking van hybride stappenmotor
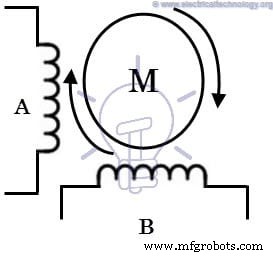
Deze motor werkt vergelijkbaar met die van een stappenmotor met permanente magneet. De bovenstaande afbeelding toont een 2-fasen, 4-polige, 6-tands rotor hybride stappenmotor. Wanneer de fase A-A' wordt geëxciteerd met een gelijkstroomvoeding, waarbij B-B' niet wordt geëxciteerd, wordt de rotor zodanig uitgelijnd dat de zuidpool van de rotor naar de noordpool van de stator wijst, terwijl de noordpool van de rotor naar de zuidpool van de stator wijst.
Als nu fase B-B' is opgewonden, waarbij AA' uitgeschakeld blijft op een zodanige manier dat de bovenste pool naar het noorden wordt en de onderste naar het zuiden, dan zal de rotor uitlijnen op een nieuwe positie door tegen de klok in te bewegen. Als de fase B-B' in tegengestelde richting wordt geëxciteerd, zodat de bovenste pool naar het zuiden wordt en de onderste naar het noorden, dan zal de rotor met de klok mee draaien.
Door een juiste reeks pulsen naar de stator zal de motor in de gewenste richting draaien. Voor elke bekrachtiging wordt de rotor in een nieuwe positie vergrendeld en zelfs als de bekrachtiging wordt verwijderd, behoudt de motor nog steeds zijn vergrendelde toestand vanwege de bekrachtiging van de permanente magneet. De staphoek van deze 2-fase, 4-polige, 6-tands rotormotor wordt gegeven als 360/ (2 × 6) =30 graden. In de praktijk worden hybride motoren gebouwd met meer rotorpolen om een hoge hoekresolutie te krijgen.
- Gerelateerde post:wat is motorefficiëntie en hoe kan deze worden verbeterd?
Unipolaire en bipolaire stappenmotoren
De hierboven besproken motoren kunnen unipolair of bipolair zijn op basis van de spoelopstelling. Een unipolaire motor wordt gebruikt met twee wikkelingen per fase en daarom verandert de richting van de stroom door deze wikkelingen de rotatie van de motor. In deze configuratie gaat de stroom door één richting in één spoel en in tegengestelde richting in een andere spoel.
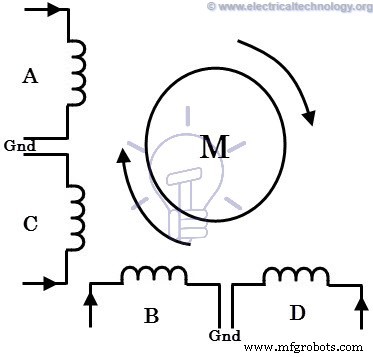
De onderstaande afbeelding toont een tweefasige unipolaire stappenmotor waarbij de A- en C-spoelen voor de ene fase zijn en B en D voor de andere fase. In elke fase voert elke spoel stroom in tegengestelde richting aan die van andere spoel. In elke fase zal slechts één spoel tegelijk stroom voeren om een bepaalde draairichting te bereiken. Dus gewoon door de klemmen naar elke spoel te schakelen, wordt de draairichting geregeld.
In het geval van een bipolaire stappenmotor, moet elke fase bestaat uit een enkele wikkeling in plaats van twee in het geval van een unipolaire. Hierbij wordt de draairichting geregeld door de stroom door de wikkelingen om te keren. Daarom vereist het een complex stuurcircuit voor stroomomkering.
- U kunt ook lezen:Wat is een solenoïde en een magneetveld van een solenoïde
Stapstanden van een stappenmotor
Een typische stapbeweging zorgt ervoor dat de motor door een reeks evenwichtsposities stapt in reactie op de stroompulsen die eraan worden gegeven. Het is mogelijk om de stapactie op verschillende manieren te variëren door simpelweg de volgorde te veranderen waarmee statorwikkelingen worden bekrachtigd. De volgende zijn de meest voorkomende bedrijfs- of rijmodi van stappenmotoren.
- Wave step
- Volledige stap
- Halve stap
- Microsteppen
Wave Step-modus
Wave step-modus is de eenvoudigste van alle andere modi waarin slechts één wikkeling tegelijkertijd wordt geactiveerd. Elke spoel van de fase is alternatief aangesloten op de voeding. De onderstaande tabel toont de volgorde waarin spoelen worden bekrachtigd in een 4-fasen stappenmotor.
In deze modus geeft de motor een maximale staphoek in vergelijking met alle andere modi. Het is de eenvoudigste en meest gebruikte modus om te stappen; het geproduceerde koppel is echter minder omdat het op een bepaald moment een deel van de totale wikkeling gebruikt. 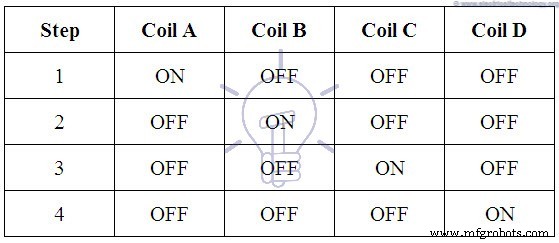
Volledige stapmodus
In deze aandrijving of modus worden op elk moment twee statorfasen tegelijkertijd geactiveerd. Wanneer twee fasen samen worden bekrachtigd, zal de rotor het koppel van beide fasen ervaren en in de evenwichtspositie komen, die tussen twee aangrenzende golfstapposities of 1-fase-excitaties zal worden geplaatst. Dus deze stap biedt een beter houdkoppel dan een golfstap. De onderstaande tabel toont de volledige stappenaandrijving voor een 4-fasen stappenmotor. 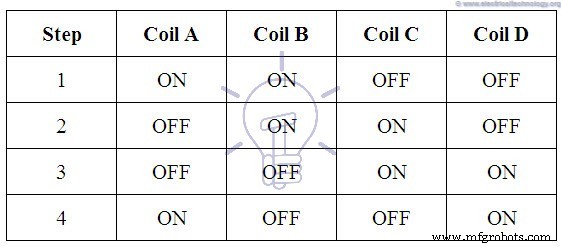
Half Step Mode
Het is de combinatie van zowel de golf- als de volledige stapmodus. Hierbij worden afwisselend enkelfasige en tweefasige excitaties uitgevoerd, d.w.z. éénfasig AAN, tweefasig AAN, enzovoort. De staphoek in deze modus wordt de helft van de volledige staphoek. Deze rijmodus heeft het hoogste koppel en de hoogste stabiliteit in vergelijking met alle andere modi. De tabel met fasepulsvolgorde voor een 4-fasenmotor in halve stappen wordt hieronder gegeven. 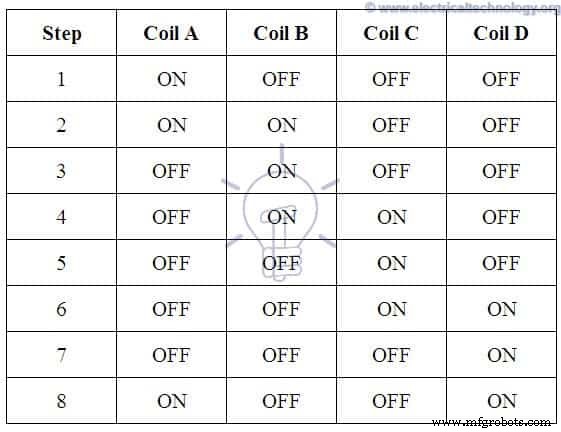
Microstepping-modus
In deze modus wordt elke motorstap onderverdeeld in verschillende kleine stappen, zelfs honderden vaste posities, waardoor een grotere positioneringsresolutie wordt verkregen. Hierbij worden de stromen door de wikkelingen voortdurend gevarieerd om zeer kleine stapjes te krijgen. Hierbij worden twee fasen gelijktijdig aangeslagen, maar met de ongelijke stromen in elke fase.
De stroom door fase -1 wordt bijvoorbeeld constant gehouden terwijl de stroom door fase-2 stapsgewijs wordt verhoogd tot de maximale waarde van stroom, of deze nu negatief of positief is. De stroom in de fase-1 wordt dan stapsgewijs verlaagd of verhoogd tot nul. De motor zal dus een kleine stapgrootte produceren.
Al deze stappenmodi kunnen worden verkregen door elk type stappenmotor dat hierboven is besproken. De stroomrichting in elke wikkeling tijdens deze stappen kan echter worden gevarieerd afhankelijk van het type motor en is ofwel unipolair of bipolair.
- Berekening van gerelateerde kabelafmetingen voor LT- en HT-motoren
Voordelen van stappenmotor
- In stilstand heeft de motor het volledige koppel. Het maakt niet uit of er geen moment is of van positie verandert.
- Het reageert goed op het starten, stoppen en omkeren van de positie.
- Omdat er geen contactborstels in de stappenmotor zitten, is deze betrouwbaar en hangt de levensduur af van de lagers van de motor.
- De rotatiehoek van de motor is recht evenredig met de ingangssignalen.
- Het is eenvoudig en goedkoper te besturen, aangezien de motor open-lusbesturing biedt bij het reageren op de digitale ingangssignalen.
- Het motortoerental is recht evenredig met de frequentie van de ingangsimpulsen, op deze manier kan een breed toerentalbereik worden bereikt.
- Als de belasting aan de as is gekoppeld, is het nog steeds mogelijk om de synchrone rotatie met lage snelheid te realiseren.
- De exacte positionering en herhaalbaarheid van beweging is goed, aangezien deze een nauwkeurigheid van 3-5% heeft van een stap waarbij de fout niet cumulatief is van de ene stap naar de andere.
- Stappenmotoren zijn veiliger en goedkoper (in vergelijking met servomotoren), hebben een hoog koppel bij lage snelheden, hoge betrouwbaarheid met een eenvoudige constructie die in elke omgeving werkt.
Nadelen van stappenmotoren
- Stappenmotoren met een laag rendement.
- Het heeft een lage nauwkeurigheid.
- Het koppel neemt zeer snel af met de snelheid.
- Omdat de stappenmotor in open-lusbesturing werkt, is er geen feedback om mogelijke gemiste stappen aan te geven.
- Het heeft een lage koppel-traagheidsverhouding, wat betekent dat het de belasting niet erg snel kan versnellen.
- Ze zijn luidruchtig.
Toepassingen van stappenmotoren
- Stappenmotoren worden gebruikt in geautomatiseerde productieapparatuur en autometers en industriële machines zoals verpakken, labelen, vullen en snijden enz.
- Het wordt veel gebruikt in beveiligingsapparatuur zoals beveiligings- en bewakingscamera's.
- In de medische industrie worden stappenmotoren veel gebruikt in monsters, digitale tandheelkundige fotografie, beademingsapparatuur, vloeistofpompen, bloedanalysemachines en medische scanners, enz.
- Ze worden gebruikt in consumentenelektronica in beeldscanners, fotokopieer- en drukmachines en in digitale camera's voor automatische zoom- en focusfuncties en -posities.
- Stappenmotoren worden ook gebruikt in liften, transportbanden en baanomleiders.
U kunt ook lezen:
- DC-drives – constructie, werking en classificatie van elektrische DC-drives
- Driefasige motorvoedings- en besturingsbedradingsschema's
- Bibliotheek voor elektrische motoren (AC &DC)
Industriële technologie
- Wat is 3D-printen? Werkingsprincipe | Soorten | Toepassingen
- Wat is stempelen?- Typen, bediening en toepassing
- Wat is draaien? - Definitie en soorten bewerkingen
- Wat is lassen? - Definitie | Soorten lassen
- Wat is casten? - Definitie| Soorten casting
- Wat is Power Hammers?- Types, ontwerp en bediening
- Waar wordt Monel voor gebruikt?
- Wat zijn de verschillende soorten kelderconstructies?
- Wat is een Strongback?
- Wat is een lineaire motor?
- Wat is een servomotor?