


Kirigami robotgrijpers zijn delicaat genoeg om eierdooiers op te tillen
Technische onderzoekers van de North Carolina State University hebben een nieuw type flexibele robotgrijpers gedemonstreerd die delicate eidooiers kunnen optillen zonder ze te breken, en die precies genoeg zijn om een mensenhaar op te tillen. Het werk heeft toepassingen voor zowel zachte robotica als biomedische technologieën.
Het werk is gebaseerd op de kunst van kirigami, waarbij tweedimensionale (2D) vellen materiaal zowel worden gesneden als gevouwen om driedimensionale (3D) vormen te vormen. In het bijzonder hebben de onderzoekers een nieuwe techniek ontwikkeld waarbij kirigami wordt gebruikt om 2D-platen om te zetten in gebogen 3D-structuren door parallelle spleten over een groot deel van het materiaal te snijden. De uiteindelijke vorm van de 3D-structuur wordt voor een groot deel bepaald door de buitenrand van het materiaal. Een 2D-materiaal met een cirkelvormige grens zou bijvoorbeeld een bolvormige 3D-vorm vormen.
"We hebben een model gedefinieerd en gedemonstreerd waarmee gebruikers achteruit kunnen werken", zegt Yaoye Hong, eerste auteur van een paper over het werk. "Als gebruikers weten wat voor soort gebogen, 3D-structuur ze nodig hebben, kunnen ze onze aanpak gebruiken om de grensvorm en het patroon van spleten te bepalen die ze in het 2D-materiaal moeten gebruiken. Extra controle over de uiteindelijke constructie wordt mogelijk gemaakt door de richting te bepalen waarin het materiaal wordt geduwd of getrokken.”
Onze techniek is een stuk eenvoudiger dan eerdere technieken om 2D-materialen om te zetten in gebogen 3D-structuren, en het stelt ontwerpers in staat om een breed scala aan aangepaste structuren te creëren van 2D-materialen”, zegt professor Jie Yin.
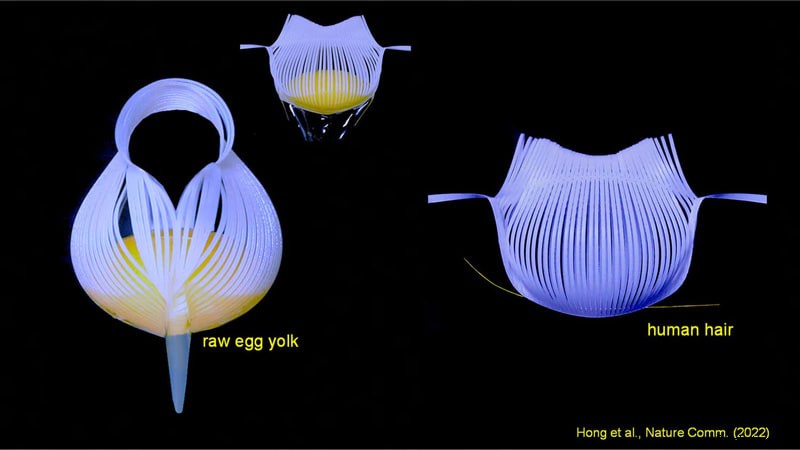
De onderzoekers demonstreerden het nut van hun techniek door grijpers te maken die objecten kunnen grijpen en optillen, variërend van eidooiers tot een mensenhaar.
"Conventionele grijpers grijpen een object stevig vast - ze grijpen dingen door er druk op uit te oefenen," zei Yin. “Dat kan problemen opleveren bij het vastpakken van breekbare voorwerpen, zoals eidooiers. Maar onze grijpers omringen in wezen een object en tillen het vervolgens op - vergelijkbaar met de manier waarop we onze handen rond een object vormen. Dit stelt ons in staat om zelfs delicate objecten te 'grijpen' en te verplaatsen, zonder in te boeten aan precisie."
De onderzoekers merken echter op dat er tal van andere potentiële toepassingen zijn, zoals het gebruik van de techniek om biomedische technologieën te ontwerpen die zich aanpassen aan de vorm van een gewricht, zoals de menselijke knie.
"Denk aan slimme bandages of bewakingsapparaten die kunnen buigen en bewegen met je knie of elleboog," zei Yin. “Dit is proof-of-concept werk dat laat zien dat onze techniek werkt. We zijn nu bezig deze techniek te integreren in zachte robottechnologieën om industriële uitdagingen aan te gaan. We onderzoeken ook hoe deze techniek kan worden gebruikt om apparaten te maken die kunnen worden gebruikt om warmte toe te passen op de menselijke knie, wat therapeutische toepassingen zou hebben.”
Automatisering Besturingssysteem
- Applicatie Spotlight:3D-printen voor robotgrijpers
- Robotgrijpers geassembleerd in de VS
- De ETSI IoT-standaard:doen regelgevers genoeg om IoT-apparaten te beschermen?
- Opinie:gerobotiseerde end-of-arm tools geven vorm aan de maakindustrie
- OnRobot lanceert robotschuursysteem
- Bobacino lanceert robotachtige theebar
- Best practices voor robotkabelbeheer
- Wat zijn slimme stroomonderbrekers?
- Kracht-/koppelsensor vergroot robotische veelzijdigheid
- Ben jij cobot-ready?
- Wat zijn cobots (samenwerkende robots)?