


De robo-zeester van MIT CSAIL maakt een nadere studie van het waterleven mogelijk
Wetenschappers hebben een 'robo-zeester' uitgevonden die ons meer inzicht geeft in het leven in het water, zoals Adam Conner-Simons of MIT CSAIL meldt. (Zie video hieronder.)
Biologen ervaren al lang de uitdagingen van het documenteren van het oceaanleven, waarbij veel vissoorten behoorlijk gevoelig blijken te zijn voor de onderwaterbewegingen van mensen.
Als mogelijke oplossing hebben computerwetenschappers speciale mariene robots ontwikkeld die zich heimelijk kunnen verplaatsen tussen hun op koolstof gebaseerde tegenhangers. Zo heeft een team van MIT's Computer Science and Artificial Intelligence Lab (CSAIL) in 2018 een zachte robotvis gefabriceerd die autonoom met echte vissen langs de koraalriffen van Fiji zwom.
De complexe dynamiek van hoe water beweegt - en het vermogen om snel een aantal perfect goede elektronische systemen te ruïneren - hebben het echter bijzonder moeilijk gemaakt om onderwaterrobots te ontwikkelen in vergelijking met die voor lucht of land.
Met de vis moest het CSAIL-team maanden van vallen en opstaan doorstaan om het ontwerp handmatig aan te passen, zodat het echt betrouwbaar in het water kon werken.
Hoewel die robot een bijzonder complexe robot was, vond een groep onder leiding van MIT-professoren Wojciech Matusik en Daniela Rus nog steeds dat er ruimte was om het productieproces te versnellen. Met dat in gedachten hebben ze nu een nieuwe tool gemaakt om een functionele zachte robot in enkele uren te simuleren en te fabriceren.
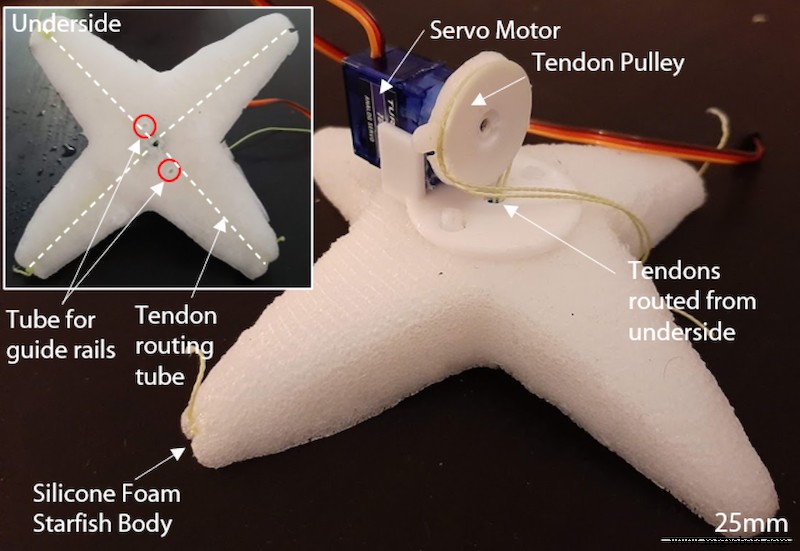
Het team gebruikte hun systeem om een zachte robotzeester te maken, gemaakt van siliconenschuim en in staat te bewegen met een enkele, energiezuinige actuator. De zeester beweegt via pezen in zijn vier poten, die zijn verbonden met een servomotor die wordt gebruikt om de benen te buigen en te ontspannen.
CSAIL-postdoc Josephine Hughes, co-hoofdauteur van een nieuw artikel naast PhD-student Tao Du over de zeester, zegt:"De passieve interacties tussen een onderwaterrobot en de vloeistofkrachten eromheen - of het nu een rustige stroming of een golvende golf is - zijn veel ingewikkelder dan wanneer een robot op stabiel terrein loopt, wat het maken van zijn besturingssystemen behoorlijk moeilijk maakt.
"Maar met deze simulator kan een proces dat normaal gesproken dagen of weken duurt, in slechts een paar uur plaatsvinden."
Du zegt dat het team een zeesterontwerp heeft gekozen vanwege de eenvoud en elegantie van zijn beweging, waarbij het knijpen en loslaten van zijn benen voorwaartse beweging creëert.
Het team ontdekte echter dat de simulator werkt voor een reeks lichaamstypes, en daarom zullen ze vervolgens ontwerpen verkennen die zijn geïnspireerd op zeeschildpadden, mantaroggen en haaien met complexere structuren zoals gewrichten, vinnen en vinnen.
De tool van de groep omvat een machine learning-model dat een eerste simulatie en ontwerp van de besturingsmechanismen van de robot uitvoert, die vervolgens snel wordt gefabriceerd.
Experimenten uit de echte wereld met de robot worden vervolgens gebruikt om meer gegevens te verzamelen om het ontwerp herhaaldelijk te verbeteren en te optimaliseren. Het resultaat is dat de robot doorgaans maar één keer opnieuw hoeft te worden gemaakt. (Er wordt momenteel gewerkt aan een aparte paper over de ontwikkeling van de simulatietool.)
"Als we robotsimulaties doen, moeten we benaderingen maken die per definitie een kloof creëren tussen simulatie en realiteit", zegt Cecilia Laschi, een professor in controle en mechatronica aan de National University of Singapore, die niet betrokken was bij het onderzoek.
"Dit werk is bedoeld om die realiteitskloof te verkleinen, met een gemengde lus van gesimuleerde en echte experimenten die behoorlijk effectief is."
Voor het lichaam van de zeester gebruikte het team siliconenschuim vanwege de elastische eigenschappen, het natuurlijke drijfvermogen en het vermogen om snel en gemakkelijk te worden vervaardigd. In experimenten ontdekten de onderzoekers dat de zeester vier keer sneller door het water kon bewegen dan bij gebruik van een handgemaakte controller door een menselijke expert.
Hughes zegt inderdaad dat het team ontdekte dat de simulator controlestrategieën lijkt te gebruiken die mensen zelf niet zouden hebben bedacht.
"Met de robotzeester hebben we geleerd dat er, naast de duidelijk zichtbare beenvoortstuwingen die ze doen, enkele subtielere hoogfrequente bewegingen zijn die hen een belangrijk momentum kunnen geven", zegt Hughes.
Het project bouwt voort op een reeks CSAIL-projecten gericht op zachte robots, waarvan Rus zegt dat ze het potentieel hebben om veiliger, steviger en wendbaarder te zijn dan hun tegenhangers met een stijf lichaam.
Onderzoekers hebben zich steeds meer tot zachte robots gewend voor omgevingen die door krappe ruimtes moeten worden verplaatst, omdat dergelijke robots veerkrachtiger zijn in het kunnen herstellen van botsingen.
Laschi zegt dat de tool van het team kan worden gebruikt om robots te ontwikkelen voor het meten van gegevens op verschillende locaties in de diepe oceaan, en om in het algemeen robots voor te stellen die op nieuwe manieren kunnen bewegen waar onderzoekers nog niet aan hebben gedacht.
"Bio-geïnspireerde robots zoals de zeesterrobot en SoFi kunnen dichter bij het zeeleven komen zonder het te verstoren", zegt Rus. "Door snel bio-geïnspireerde robotinstrumenten te ontwerpen en te bouwen, zal het in de toekomst mogelijk zijn om aangepaste observatoria te creëren die in de wildernis kunnen worden ingezet om het leven te observeren."
Du en Hughes schreven het artikel samen met Matusik, Rus en MIT-studenten Sebastien Wah. De paper werd deze week gepubliceerd in de Journal of Robotics Automation Letters en zal ook virtueel volgende maand worden gepresenteerd op IEEE's International Conference on Soft Robotics (RoboSoft).
Automatisering Besturingssysteem
- Sepro heeft zijn eerste 'Made-in-America'-robot
- Robots bij NPE:sneller, sterker, slimmer
- De robots bezig houden
- Injection Molding:snellere robots en cobots
- Robot- en cobotmakers gaan samenwerken
- Algemene 5-assige robotreeks opnieuw ontworpen
- Omron lanceert nieuwe SCARA-robot
- Nachi-Fujikoshi breidt assortiment compacte robotseries uit
- 5 dingen die u moet overwegen voordat u een robot aanschaft
- Robots krijgen hand-oogcoördinatie
- Waarom een collaboratieve robot gebruiken?