


4D-beeldradarchipsets verbeteren objectidentificatie
Radar wordt hot, vooral met verbeteringen die objectidentificatie/classificatie en hogere breedtegraadresolutie beloven - iets wat traditionele radars niet konden doen. Met deze nieuwe innovaties komen radars naar voren als de meest gewilde sensor onder autofabrikanten en Tier Ones die sterk geautomatiseerde voertuigen ontwikkelen.
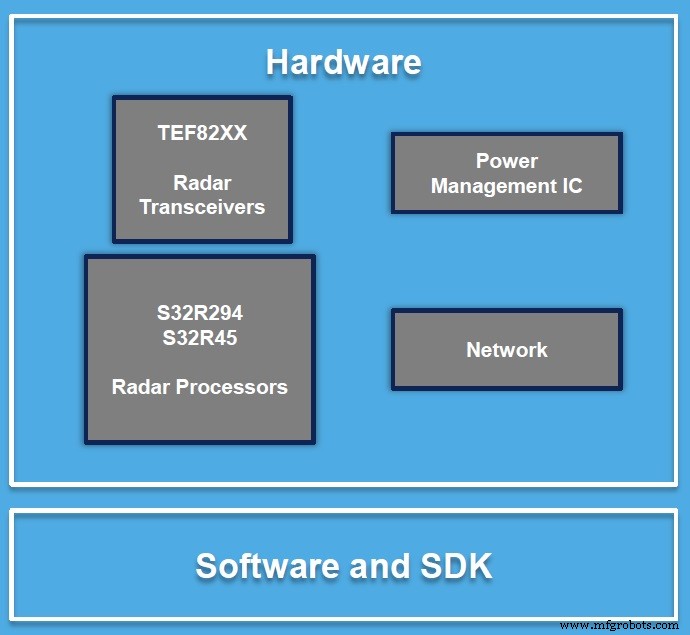
Radarsysteemoplossing (Bron:NXP)
In reactie op de hoge verwachtingen van de auto-industrie heeft NXP Semiconductors aangekondigd dat het een reeks nieuwe radarsensor-chipsets gaat testen, bestaande uit de S32R45-radarprocessor van het bedrijf en nieuwe 77GHz-transceivers genaamd TEF82xx.
NXP, dat vijf jaar geleden pionierde met RF CMOS-radars met zijn eerste radarchip genaamd "Dolphin", is een toonaangevende leverancier van autoradaroplossingen.
De 4D-beeldsensoren van NXP kunnen niet alleen bereik en snelheid meten, maar ook "hoogte, richting en aankomsthoek, terwijl objecten met een veel hogere resolutie worden geïdentificeerd", legt Torsten Lehmann, executive vice president en general manager voor radiofrequentieverwerking, uit tijdens een interview met EE Times . Met 4D-beeldradar die niet alleen de horizontale maar ook verticale vlakken kan begrijpen, kan een voertuig bijvoorbeeld bepalen of het "onder" of "over" een object moet rijden, zei Lehman.
"Stel je een scène voor waarin een voertuig met 80 kilometer per uur op een snelweg rijdt, terwijl een motorfiets - een klein object met een lage reflectiviteit - van achteren komt met 200 kilometer per uur", zei hij. In tegenstelling tot camera's en lidars, kunnen deze nieuwe, verbeterde radars de motorfiets identificeren, aanvankelijk ver uit elkaar, en herkennen dat deze twee objecten met twee verschillende snelheden bewegen, legt Lehmann uit.

(Bron:NXP)
Tot nu toe was radar de enige sensor die in staat was om meer dan 300 meter te werken en objecten te herkennen die met hoge snelheden rennen. Noch camera's, noch lidars kunnen zoveel afstand en snelheid aan.
Met de opkomst van beeldradars met een hogere resolutie, willen veel radarleveranciers, waaronder NXP, radars verheffen als de enige hogesnelheidssensor die in de slechtste weers- en lichtomstandigheden kan functioneren.
Schaalbaarheid
NXP is niet de enige die het heeft over 4D-beeldradar. Continental kondigde afgelopen september aan dat het Xilinx FPGA's gaat gebruiken om de eerste productieklare 4D-beeldradar in de auto-industrie in te zetten, die naar verwachting in 2021 in personenauto's zal worden verzonden.
Gezien de volumeproductie-ervaring van NXP met 77GHz RF CMOS-transceivers en zijn S32R45-radarprocessor, beweert NXP dat zijn 4D-beeldradarchipset de kosten en energie-efficiëntie aanzienlijk kan verlagen in vergelijking met FPGA-implementatie voor algemene doeleinden. NXP heeft echter afgezien van het specificeren van de mate van kosten-/vermogensreductie.
Phil Magney, oprichter en president van VSI Labs, vertelde ons:"We volgen deze ruimte al enkele jaren op de voet. Ironisch genoeg was de eerste keer dat ik erover hoorde van een NXP-presentatie enkele jaren geleden. In die tijd werd het gepresenteerd als een potentiële concurrent van lidar, omdat de nieuwe radars een puntenwolk konden produceren.”
Het is duidelijk dat NXP al een tijdje bezig is met het plannen van de lancering van de 4D-beeldradar.
Maar de toon van NXP verschuift. In plaats van alleen maar te praten over het vermogen van het bedrijf om puntenwolken te produceren, is de nadruk nu verschoven naar de schaalbaarheid die wordt geboden door een reeks nieuwe radaroplossingen.
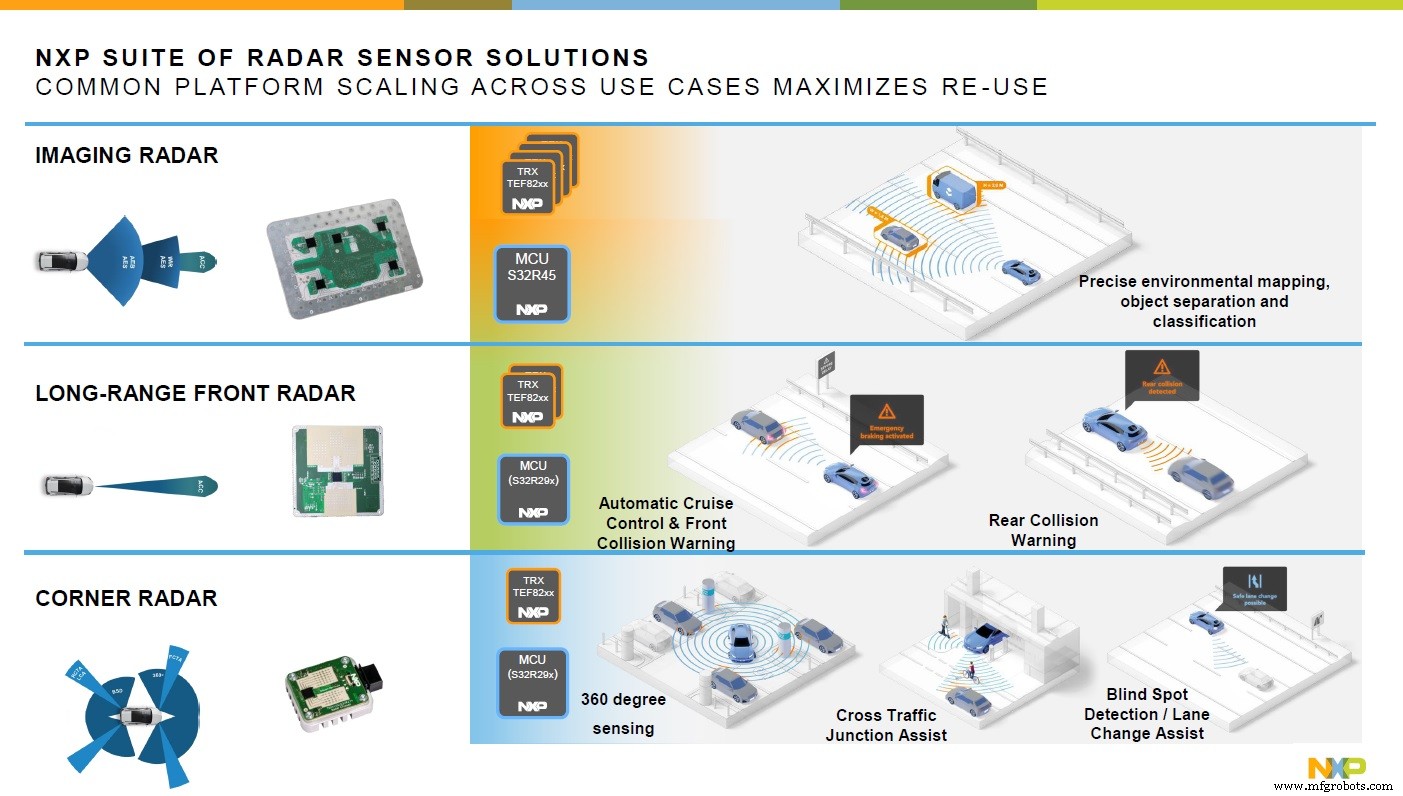
NXP prijst nu "een gemeenschappelijk platform dat schaalt over verschillende gebruiksscenario's", variërend van hoekradar en langeafstandsfrontradar tot beeldradar. Dit is belangrijk voor een industrie die op zoek is naar technologieën om te voldoen aan de vereisten van het New Car Assessment Program (NCAP) die betere prestaties in dode hoeken en automatische noodremfuncties eisen. Hoewel NCAP geen voorkeurssensortechnologieën specificeert, zoeken autofabrikanten - onder druk om te voldoen aan de NCAP-vereisten - naar betere radartechnologieën die objecten in de hoek en vooraan kunnen detecteren, legt Lehmann uit.
klik voor afbeelding op volledige grootte
(Bron:NXP)
Voor dodehoekdetectie en rijstrookassistentie in voertuigen met niveau 1 en 2 werkt een combinatie van de enkele TEF82xx-transceiver van NXP en de S32R45-radarprocessor. De toevoeging van automatische cruisecontrol en waarschuwing voor aanrijdingen voor en achter aan L2- en L3-auto's zou twee zendontvangers vereisen in plaats van één. Voor het scheiden en classificeren van objecten die worden vereist door L4- en L5-autonome voertuigen, kunnen OEM's vier trapsgewijze transceivers combineren met één radarprocessor.
De sleutel is dat autofabrikanten die verschillende merken en modellen moeten aanpakken tijdens de overgang naar meer automatisering, één enkel platform moeten kunnen gebruiken dat is ontworpen om software en hardware te hergebruiken.
Overgang naar 4D-beeldradar
De evolutie van autoradars wordt echter vertroebeld door marketingjargon.
Traditionele radars - soms 2D genoemd - zijn overgegaan als beeldradars. "Beeldradar creëert in wezen een array waardoor de dichtheid van metingen dramatisch toeneemt", legt Magney uit. “Traditionele 2D-radar is in vergelijking grof en levert maar één punt per object op. Maar een beeldradar zou veel punten opleveren om beter te begrijpen wat er wordt gevolgd." Samenvattend merkte hij op:"Imaging-radar produceert verticale resolutie waarbij traditionele radar vanaf een enkel vliegtuig werkt."
Waarin verschillen 3D- en 4D-beeldradars dan?
“Ik denk dat de tijd wordt gebruikt in de vierde dimensie. Ik heb dit ook van een paar andere bedrijven gehoord en dit is hoe ze het gebruiken”, merkte Magney op. Maar hij voegde eraan toe:"Eerlijk gezegd is 4D meer een marketinghype dan iets anders, omdat het tijdselement is afgeleid van Doppler. Dus als dit het geval zou zijn, zou traditionele 2D 3D kunnen heten.”
Met andere woorden, het tijdselement is altijd van cruciaal belang geweest voor wat radars bieden. Toen hij dezelfde vraag stelde, merkte Lehman van NXP op dat het vierde element van de 4D-beeldsensor "laterale resolutie" is. 4D-beeldradar begrijpt de omgeving beter en bepaalt of een voertuig onder of over een object kan vliegen.
Latitude-resolutie
"Hogere breedtegraadresolutie" vertaalt zich in een grotere verticale resolutie, merkte Magney op. "Dit is op zich al een van de belangrijkste kenmerken."
Deze discussie roept de zaak Joshua Brown op. Browns Tesla Model S-sedan doodde de bestuurder en kwam in mei 2016 in botsing met een trekker-oplegger die zijn pad kruiste op de Amerikaanse snelweg 27A in Florida. gigantische tuig, en reed er recht in.

De foto toont de rechterkant van de oplegger. Gebied in rood ovaal markeert aanrijdingsschade van Joshua Brown's Tesla S. (Bron:National Transportation Safety Board)
Had een 4D-beeldsensor zo'n dodelijk ongeval kunnen voorkomen? Magney zei:"Ja, dit type radar zou niet vatbaar zijn voor valse positieven van traditionele radar. En het zou het Tesla-ongeluk niet hebben toegestaan.'
Transceivers met hogere prestaties en radarverwerking
De nieuwe TEF82xx van NXP - 75 mm x 75 mm - is gebouwd op zijn tweede generatie RFCMOS op basis van 40nm-procestechnologie. Het bedrijf beweert dat het de RF-prestaties kan verdubbelen voor verbeterde detectie, in vergelijking met de vorige versie.
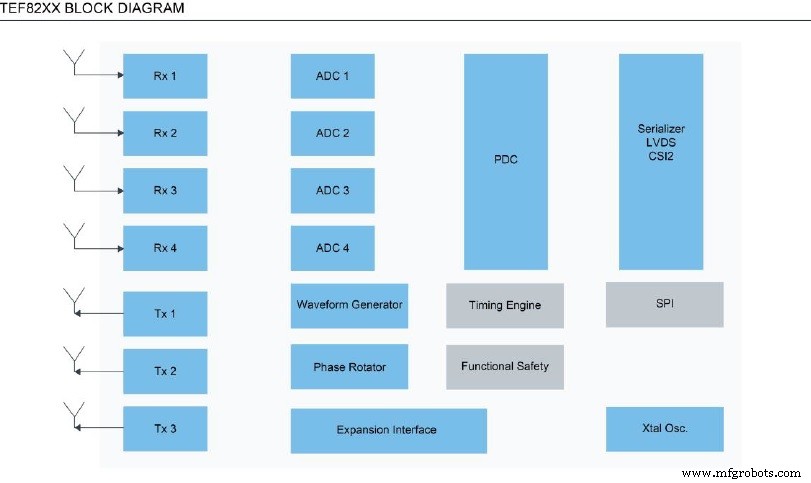
De nieuwe transceiverchip biedt ook 4X faseruisonderdrukking rond het doel, waardoor een betere objectscheiding mogelijk is. Het wordt geleverd met een 6-bits faserotator voor straalbesturingstoepassingen en geavanceerde modulatie-MIMO-ondersteuning.
De nieuwe S32R45-radar van NXP is gebouwd op het 16nm FinFET-proces. Het biedt tot 4X cascade-transceiverondersteuning voor "nauwkeurige omgevingskartering en verbeterd begrip van scènes" in L4- en L5-voertuigen, beweerde het bedrijf.
klik voor afbeelding op volledige grootte
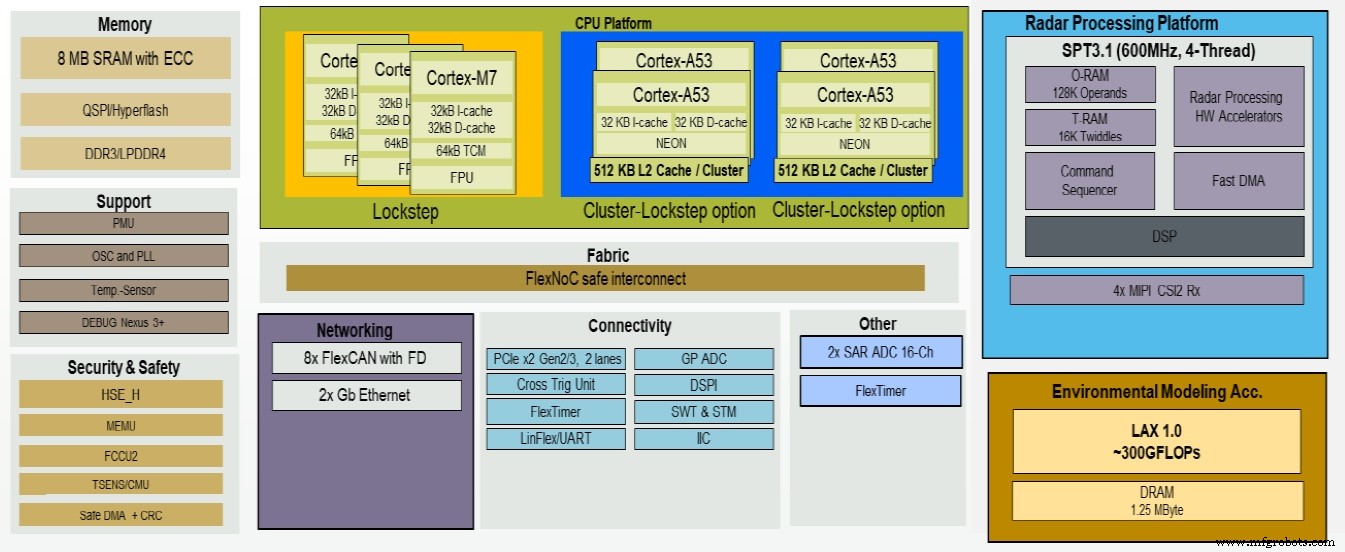
S32R45 blokschema. (Bron:NXP)
Het is belangrijk op te merken dat de S32R45 in staat is tot nieuwe radarversnellingen. Meer specifiek biedt het volgens NXP een nieuwe "lineaire algebra-radarversneller" die tot 64x prestaties levert in vergelijking met een ARM A53-kern. Dit vertaalt zich in het uitvoeren van "super-resolution direction of arrival (DoA) -algoritmen en echte MIMO-werking, zelfs in ongunstige weersomstandigheden", beweerde NXP.
Hernieuwd debat:lidar vs. radar
NXP beweert dat zijn nieuwe 4D-beeldradar een hoekresolutie van minder dan 1 graad biedt. Maar hoe verhoudt het zich tot lidar?
Lehman merkte op:"Als je het hebt over een goed presterende lidar - zoals een mechanisch roterend soort dat door Waymo wordt gebruikt, kan het veel korrelige puntenwolken produceren, omdat het een hoekresolutie van minder dan 0,1 ° of 0,5 ° biedt." Hij voegde eraan toe, maar zo'n lidar is "omvangrijk en kost duizenden dollars."
Magney merkte op:"Er gaat een gerucht dat Tesla beeldvormingsradar overweegt voor het model 3-platform en dit zou een goede zet zijn, omdat het een beter antwoord biedt om lidar niet te gebruiken." De demontage van System Plus Consulting onthulde dat Tesla de 2D-radar van Continental gebruikte, zoals gerapporteerd door EE Times .
Volgens Magney is Tesla echter overgestapt van Continental naar Bosch voor een groter bereik. Hij legde uit dat dit beide 2D-radars zijn met de beperkingen van traditionele radars. “Wat mij betreft zou een overstap naar beeldradar door Tesla slim zijn. Begrijp dat beeldradar een puntenwolk produceert. Hoewel het een lagere resolutie heeft dan Lidar, is het [nog steeds] een enorme verbetering ten opzichte van traditionele radar”, zegt Magney.
Samenvattend benadrukte Magney echter:"Ik ben nog niet van plan om lidar onder de bus te gooien."
Naar zijn mening heeft lidar nu een enorm voordeel ten opzichte van radar, ook al wordt dat gat misschien gedicht met de nieuwe radars. “Een van de belangrijkste toepassingen voor lidar is de mogelijkheid om relatieve lokalisatie uit te voeren op basis van een basiskaart. Dit is van vitaal belang voor stedelijke robotaxis en shuttles en ik denk niet dat je lidar voor deze taak zou kunnen vervangen."
Magney concludeerde:"Lidar zal niet verdwijnen, zelfs niet als 4D-radar komt. In plaats van lidar te verdringen, zou je kunnen zeggen dat de nieuwe radars enkele van de beperkingen van traditionele radar overwinnen.”
Beschikbaarheid
De nieuwe radarchipset van NXP, die vandaag wordt bemonsterd, zal in 2021 in volumeproductie gaan. Hoekradar, frontradar en 4D-beeldradar zullen in 2021 over enkele maanden worden uitgebracht, maar alle drie zullen in de tweede helft beschikbaar komen, zei Lehman. Hij weigerde commentaar te geven op de prijzen.
>> Dit artikel is oorspronkelijk gepubliceerd op onze zustersite, EE Times.
Ingebed
- C# klasse en object
- Java Singleton-klasse
- Apacer onthult nieuwe industriële productidentificatie
- Microchip:PolarFire FPGA-gebaseerde oplossing maakt 4K-video en beeldvorming met de kleinste vormfactor mogelijk
- Kymati ontwikkelt aangepaste radaroplossingen
- 30 fps automotive imaging radarprocessor debuteert
- Low-power radarchip maakt gebruik van spiking neurale netwerken
- Manhattan Skyline:compacte ARM COM met NXP i.MX 8MM
- congatec:nieuwe SMARC-module met NXP i.MX 8M Mini-processor
- Kit biedt mmWave-ontwikkelplatform
- Java - Serialisatie