


Inverse kinematica in robotica:wat u moet weten
Wat is inverse kinematica?
Hoeveel moet je erover weten om het meeste uit je robot te halen?
Inverse kinematica voor robotica is een enorm en vaak complex onderwerp. Afhankelijk van je project, moet je er misschien heel gedetailleerd over weten of rondkomen met basiskennis.
Hier is de essentiële informatie die u moet weten over inverse kinematica voor robotica.
Wat is inverse-kinematica?
Inverse kinematica is een wiskundig proces dat wordt gebruikt om de gewrichtsposities te berekenen die nodig zijn om de eindeffector van een robot op een specifieke positie en oriëntatie te plaatsen (ook bekend als de "pose"). Een betrouwbare inverse kinematische oplossing is nodig om een robot te programmeren om taken uit te voeren.
Het is belangrijk om duidelijk te zijn over de verschillen tussen de inverse kinematica en de voorwaartse kinematica van de robot.
Voorwaartse kinematica bepaalt waar de eindeffector zal zijn als de gewrichten op een specifieke positie worden ingesteld. Er is maar één oplossing voor de voorwaartse kinematische vergelijking. Wanneer de gewrichten op een bepaalde positie worden gezet, komt de eindeffector altijd op dezelfde plaats terecht.
Met inverse kinematica zijn er vaak meerdere verschillende oplossingen en meerdere benaderingen voor het berekenen van de inverse kinematische oplossing.
Waarom we inverse kinematica nodig hebben in robotica
Als we geen inverse kinematica hadden, zou het programmeren van robots extreem moeilijk zijn... zo niet onmogelijk.
Als u wilt dat de eindeffector van uw robot naar een bepaalde plek in zijn werkruimte gaat, is het logisch dat u de gewenste pose in het programma invoert.
Maar je kunt een robot niet zomaar vertellen om naar je gewenste X, Y en Z te gaan coördineert en verwacht dat de robot uw instructies begrijpt... niet zonder inverse kinematica.
De meeste industriële robots zijn opgebouwd uit verschillende onafhankelijk bestuurbare scharnierende verbindingen. Elk gewricht is verbonden met een of meer van de andere gewrichten, soms in complexe configuraties. De eindeffector wordt bevestigd aan het einde van de gehele “kinematische keten”. Als je een gewricht beweegt, heeft dit op verschillende manieren invloed op de houding van de eindeffector.
Dit betekent dat er geen eenvoudige, directe relatie is tussen de positie van de eindeffector en een bepaald gewricht.
Als u bijvoorbeeld wilt dat de eindeffector van de robot 1 mm lineair langs de Z-as beweegt, moet u mogelijk alle gewrichten in een andere mate verplaatsen.
Ten slotte berekenen inverse kinematica-algoritmen de exacte positie van elk van de gewrichten van de robot die nodig is om de gewenste eindeffectorhouding te bereiken.
De inverse kinematica van een robotarm vinden
Wanneer je wat onderzoek doet naar inverse kinematica voor robotica, zul je vaak pagina's en pagina's met vergelijkingen, formules en algoritmebeschrijvingen vinden. Dit komt omdat het berekenen van inverse kinematica een goed ingeburgerd veld is in robotica-onderzoek. Buiten het onderzoeksveld hebben niet veel mensen het over inverse kinematica (behalve 3D-animators).
Wanneer we echter robots voor industriële toepassingen gebruiken, zijn er 2 basisopties om een inverse kinematica-oplossing te vinden:
- Je kunt al het wiskundige en programmeerwerk zelf doen om een inverse kinematische oplosser voor je specifieke robot te maken.
- U kunt een bestaande inverse kinematische oplosser gebruiken voor uw specifieke robot die "uit de doos" werkt.
Welke van deze u kiest, hangt af van uw unieke situatie.
Als je de robot zelf hebt gebouwd - d.w.z. helemaal opnieuw gebouwd door motoren en mechanische verbindingen met elkaar te verbinden - zul je waarschijnlijk optie 1 moeten kiezen.
Als u een industriële robot gebruikt die afkomstig is van een robotfabrikant, zal optie 2 bijna altijd sneller en gemakkelijker zijn.
De harde methode:maak een inverse-kinematica-oplosser
Als je ervoor kiest om je eigen inverse kinematische oplosser te maken, bereid je dan voor op serieus programmeren!
Er zijn 2 fundamentele benaderingen voor het berekenen van de inverse kinematica:
1. Analytische Inverse Kinematische Oplossingen
Een analytische inverse kinematische oplosser zal in staat zijn om de gewenste eindeffectorhouding aan te nemen en (bijna) onmiddellijk de vereiste gewrichtsposities uit te spugen.
Dit komt omdat, "onder de motorkap", de kinematische keten van de robot is teruggebracht tot een uitdrukking in gesloten vorm - voor elke eindeffector-houding is er een wiskundige definitie van de vereiste gewrichtsposities.
Hoewel u zelf (met de hand) de expressie in gesloten vorm kunt genereren, is dit meestal niet nodig. Tegenwoordig maakt de IKFast-bibliotheek deze taak een stuk eenvoudiger dan vroeger.
2. Numerieke/iteratieve kinematica-oplossers
Niet alle robots hebben een analytische inverse kinematische oplossing. Wanneer de kinematische structuur van de robot complex of ongebruikelijk is, is de enige optie om een numerieke inverse kinematica-oplosser te gebruiken.
Bovendien is er in een numerieke oplossing geen duidelijke uitdrukking in gesloten vorm. In plaats daarvan, wanneer u uw gewenste eindeffectorpositie invoert, werkt een iteratief algoritme naar een oplossing voor de vereiste gewrichtsposities door deze te behandelen als een optimalisatieoplossing.
Bij elke iteratie voert het algoritme enkele gewrichtsposities in de voorwaartse kinematische vergelijking van de robot in om erachter te komen waar de eindeffector terechtkomt. In de volgende iteratie gebruikt het deze informatie om de gewrichtsposities verder aan te passen. Hierdoor wordt de eindeffector geleidelijk naar de gewenste pose verplaatst.
Door deze iteratieve benadering zijn numerieke inverse kinematica-oplossingen langzamer dan analytische oplossingen.
De gemakkelijke methode:gebruik een bewezen inverse-kinematica-oplosser
Je eigen oplosser voor inverse kinematica maken is een goede intellectuele oefening als je op de universiteit zit of als je je eigen robot helemaal opnieuw bouwt.
Maar als u uw robot alleen in een productieomgeving wilt gebruiken, is het onwaarschijnlijk dat u uw eigen inverse kinematica-oplosser moet maken.
Het is veel gemakkelijker en sneller om gewoon een bestaande solver te gebruiken die al in uw robotprogrammeeromgeving is geïntegreerd.
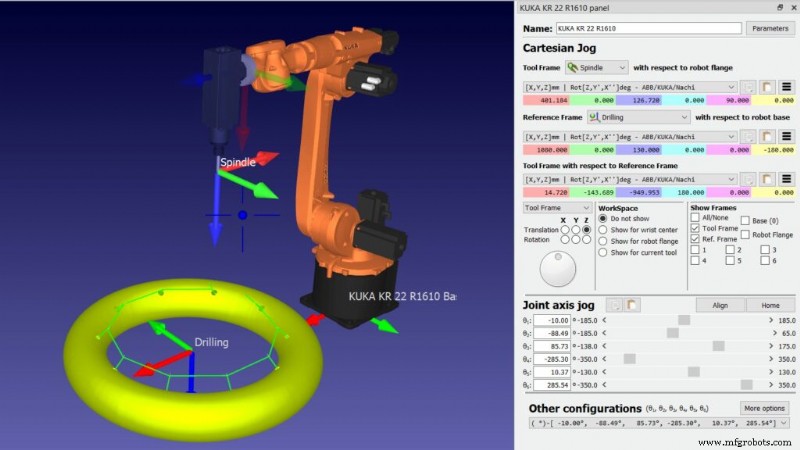
Alle robots in de Robotbibliotheek van RoboDK hebben hun eigen inverse kinematische oplossers. Hierdoor kun je ze meteen programmeren zonder er ooit over na te hoeven denken.
De meeste van onze solvers zijn vooraf gegenereerde analytische oplossingen die bij het robotbestand worden geleverd. Sommige van de meer complexe robots in de bibliotheek gebruiken echter wel numerieke oplossers. Zelfs met de numerieke oplossers is de verminderde rekensnelheid geen probleem met RoboDK, aangezien u uw robot offline programmeert voordat u uw programma naar de robot zelf stuurt.
Maak tenslotte alleen je eigen inverse kinematische oplosser als het echt moet.
Zo niet, dan kunt u uw tijd veel beter besteden aan het maken van het robotprogramma voor uw taak en het sneller in productie nemen.
Welke vragen heb je over inverse kinematica in robotica? Vertel het ons in de reacties hieronder of neem deel aan de discussie op LinkedIn, Twitter, Facebook, Instagram of in het RoboDK-forum.
Industriële robot
- Voorspellend onderhoud – Wat u moet weten
- Wat u moet weten over CMMC-certificering
- Wat u moet weten over PCB-assemblage
- Nauwkeurige metaalbewerking:wat u moet weten
- Wat u moet weten over het overmolding-proces
- Wat u moet weten over het exporteren van machines
- AC- en DC-motoren:wat u moet weten
- Wat u moet weten over dynamisch remmen
- Wat u moet weten over hydraulische hulpremmen
- Wat u moet weten over industrieel wrijvingsmateriaal
- Wat u moet weten over apparatuurfinanciering