


Wat is een robotmanipulator? Een gids

De onderdelen van een robot spelen allemaal een rol in zijn werking en bepalen voor welk soort taken hij kan worden ingezet. Daarom zou een grondige kennis van dergelijke onderdelen de eerste stap zijn bij het kiezen van de juiste industriële robot voor uw behoeften. Hoewel er veel onderdelen zijn om te overwegen, zou het misschien nuttig zijn om met een van de belangrijkste te beginnen; een robot manipulator.
Inhoudsopgave
Wat is robotmanipulatie?

Een robot is een machine die is geprogrammeerd om automatisch bepaalde taken voorspelbaar uit te voeren. Om dit te doen, moet het objecten hanteren en ze ofwel verplaatsen of ze beïnvloeden door acties zoals lassen of boren. Het is deze behandeling of procedures die worden uitgevoerd op objecten die robotmanipulatie wordt genoemd. Deze definitie geeft ons daarmee context om robotmanipulators te definiëren.
Een robotmanipulator is een armachtige structuur die is verbonden met het lichaam van een robot en wordt gebruikt om taken uit te voeren. Een robot zonder manipulator zou het equivalent zijn van een persoon die een taak uitvoert met de handen op de rug gebonden, het is gewoon niet levensvatbaar. Het is in feite om deze reden dat robotmanipulators ook wel robotarmen worden genoemd.
Waaruit bestaan robotmanipulators?
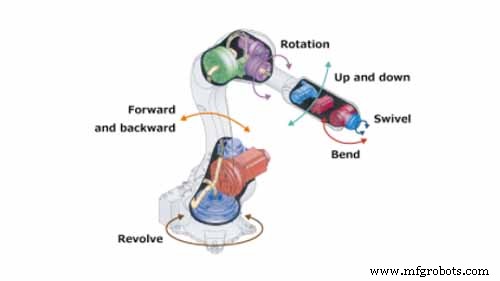
Bron:Kawasaki
Robotmanipulatoren bestaan uit een reeks verbindingen en schakels die in hun interne structuur zijn versmolten. Van de buitenkant, de robotische manipulatorarm lijkt alleen op de robot te zijn gemonteerd. De reeks verbindingen en schakels gaan echter verder in het robotlichaam om ze te binden. Dit zorgt ervoor dat de robot en de manipulator samenwerken in gecoördineerde vloeiende bewegingen.
Koppelingen zijn starre componenten die verschillende delen van een robot samenvoegen. Hoewel hun stijfheid zorgt voor een stevige structuur, zou het het voor de robotonderdelen moeilijk maken om tijdens taken te bewegen. Als gevolg hiervan worden er verbindingen aan de schakels toegevoegd om flexibiliteit te vergemakkelijken. Gewrichten zijn beweegbare componenten die tegen elkaar schuiven om lineaire, roterende of revolutionaire bewegingen van robotonderdelen te vergemakkelijken. Ze zijn gebouwd en werken op dezelfde manier als een menselijke elleboog of knie.
Robotmanipulators in verschillende robots

Bron:www. brainkart.com
Het type en aantal gewrichten dat een robotmanipulator heeft, bepaalt zijn vrijheidsgraden, de vorm van zijn werkomhulsel en hoe het kan worden toegepast. Dit bepaalt op zijn beurt hoe een robot wordt ingedeeld. Laten we ter illustratie eens kijken naar verschillende soorten robots en de structuren van hun robotmanipulatoren.
Cartesische robot- de manipulatoren zijn verbonden met behulp van 3 prismatische verbindingen die loodrecht op elkaar staan en alleen lineaire schuifbewegingen bieden. Als gevolg hiervan wordt een Cartesiaanse robot geclassificeerd als een robot met 3 assen en heeft deze een geometrische werkomhulling.
Polar Robot- de arm en het lichaam van een polaire robot worden verbonden met behulp van een draaigewricht. Dit type gewricht maakt cirkelvormige bewegingen mogelijk waardoor de polaire robotarm binnen 3 assen kan bewegen in een polair geometriesysteem.
Cilindervormige robot- een cilindrische robotarm werkt met een roterend gewricht aan de basis en een lineair gewricht waarmee het langs de verticale as kan bewegen. De opzet van deze verbindingen zorgt ervoor dat de manipulator kan verlengen en intrekken, maar zijn werkomhulsel is nog steeds vrij beperkt tot een kleine cilindrische vorm.
SCARA-robot – de gewrichten in een SCARA-robot zijn roterend en vergemakkelijken de bewegingen langs de XY-assen terwijl ze stijf blijven in de Z-as. Omdat de verbindingen een horizontaal vlak zijn, hebben SCARA-robots brede werkomhullingen in een halfronde vorm.
Knikrobot – een gelede robot heeft de meest flexibele manipulatoren van alle andere robots. De robotmanipulatorarm is verbonden met het robotlichaam door middel van een roterende verbinding, terwijl de elleboog en andere delen in de arm zijn verbonden met behulp van roterende verbindingen. Dankzij de draaiende gewrichten kan de arm rollen, stampen en gieren, waardoor een robot met 6 assen ontstaat.
Toepassingen van robotmanipulators
De flexibiliteit van verschillende robotmanipulators kan worden benut om processen in verschillende industrieën te automatiseren. Voorbeelden van dergelijke toepassingen zijn:
Robotische chirurgie- in deze toepassing is een gelede robotmanipulator uitgerust met chirurgische instrumenten als eindeffectors. Het wordt op afstand bestuurd door een chirurg om chirurgische manoeuvres uit te voeren.
Kies en plaats – dit is een veel voorkomende industriële toepassing waarbij robotmanipulatoren worden toegepast voor repetitieve pick-and-place-taken zoals het verpakken van goederen.
PCB-montage – in dit geval vervangt een robotmanipulator de handen van een menselijke arbeider om microonderdelen met hoge precisie en snelheid op een printplaat te monteren.
Conclusie
Het is veilig om te zeggen dat de betekenis van de robotmanipulator in de robotica verder gaat dan alleen de functie. Het gaat verder om de structuur te definiëren en hoe een robot kan worden toegepast. Kwaliteitsmanipulatoren van een gerenommeerde fabrikant van robotarmen zou daarom een waardevolle investering zijn voor iedereen die zich in robotica waagt.
Industriële robot
- Welke industrieën en bedrijven robots gebruiken
- Industriële robots - de ultieme gids
- Wat is Robotic Process Automation en zijn voordelen
- De ultieme gids over robotlassen in de maakindustrie
- Robotische arm:hoe wordt het gemaakt?
- Robotica in de automobielindustrie
- Robot Warehouse-systeem:wat het is en hoe het wordt gebruikt
- Automatisering en robotica:wat zijn hun verschillen?
- M2M of Machine to Machine communicatie, wat is het?
- Thermografie, wat is het en waarvoor wordt het gebruikt?
- Industrie 4.0, wat houdt het in?