


Verschil tussen cartesiaanse, zesassige en SCARA-robots

Cartesiaanse, zesassige en SCARA-robots ze behoren allemaal tot de verschillende typen industriële robots . Productie-industrieën wenden zich tot het gebruik van industriële robots bij hun productie, en alle drie soorten robots zijn zeer betrokken. Elk van hen is op een unieke manier ontworpen waardoor het een bepaalde taak kan uitvoeren die de ander waarschijnlijk niet kan doen.
De productietijden zijn nu sneller omdat robots urenlang non-stop kunnen werken zonder dat er ook maar een enkele pauze nodig is. Voeg hun snelheid en nauwkeurigheid toe aan de mix, en je kijkt naar een toekomst waarin menselijke arbeid in fabrieken niet langer nodig zal zijn.
Inhoudsopgave
Wat zijn cartesiaanse, zesassige en SCARA-robots?

Bron:Pinterest
Op het eerste gezicht lijken deze robots misschien hetzelfde voor een ongetraind oog, maar ze gaan dieper dan dat. De meeste hebben misschien dezelfde vorm, maar hun ontwerp en de functies die ze uitvoeren zijn totaal verschillend.
Voordat we de dingen ontleden die de drie robots onderscheiden, is het belangrijk dat we eerst weten wat elk van hen is.
Cartesiaanse robots
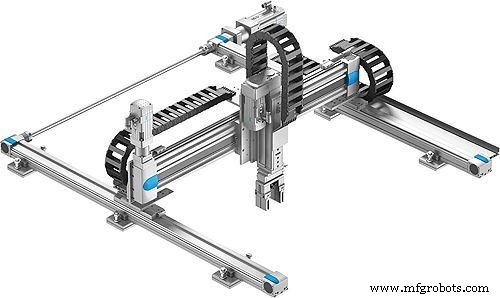
Bron:Pinterest
Cartesische robots worden soms Gantry Robots genoemd , en ze zijn van het type dat werkt vanuit een bovenliggend rooster en lineaire actuatoren en motoren gebruikt om gereedschappen te positioneren. Het heeft een rechthoekig gevormde werkomhulling waarvan de grootte afhankelijk is van de grootte van het raster. Cartesiaanse robots hebben een driedimensionale beweging; hun stijfheid maakt ze zeer nauwkeurig wanneer ze in gebruik zijn. Ze worden veel gebruikt als robots voor materiaalbehandeling en machinaal schilderen.
Zes-assige robot

Bron:Pinterest
Een Zes-assige robot is het type dat op een voetstuk is gemonteerd om de robotarm . mogelijk te maken om meer beweging in alle richtingen en de beste controle te hebben dan de andere twee robots. Zoals de naam al aangeeft, een 6-assige robot heeft zes assen die op een driedimensionale manier bewegen en waardoor het zichzelf kan positioneren zoals het wil. Hun hoge flexibiliteit maakt ze de ideale fabrieksrobotarm voor laswerkzaamheden, als robotpalletizer , en als een robot voor het verzorgen van machines .
SCARA-robot

Een SCARA-robot behoort tot de beste industriële robots . Het heeft een cirkelvormige werkomhulling en is gemonteerd op een voetstuk, gebruikmakend van een vier-assige robotarmen bewegen langs een driedimensionaal vlak. Aan het einde van het vliegtuig hebben ze iets dat een theta-as wordt genoemd en dat hen meer flexibiliteit geeft, een functie die ze goede palletiseerrobots maakt, machine laden en lossen, en assemblagerobot voor kleine onderdelen .
De verschillen tussen cartesiaanse, zesassige en SCARA-robots
Dus hoe verschillen Cartesiaanse, Six-Axis en SCARA-robots precies van elkaar? Om ze beter van elkaar te onderscheiden, gebruiken we de volgende parameters.
Laadcapaciteit

Bron:Pinterest
Het maximale laadvermogen voor elke robot is afhankelijk van de grootte van de robot en de taak waarvoor deze is ontworpen. In de regel voor de meeste robotarmen , moet het laadvermogen van een robot groter zijn dan het totale gewicht van de nuttige last. Op basis hiervan zijn cartesiaanse robots beter in staat om zwaardere ladingen aan te kunnen dan de andere twee. Voor SCARA- en Six-Axis-robots zijn ze beperkt omdat ze belastingen ondersteunen op hun uitgestrekte robotarmen .
Voor een Cartesiaanse robot is de pick and place-automatisering van zware lasten is eenvoudig omdat de lagers en steunframes het volledige bewegingsbereik kunnen ondersteunen. Om het punt beter te illustreren, stel je een belasting voor van 110 pond. Het gewicht ligt ruim binnen het laadvermogen van alle drie de robots; 110 pond is echter aan de bovenkant van de capaciteit van de SCARA; het zal daarom meer bedieningselementen en extra onderdelen vergen om het resulterende koppel aan te kunnen.
Maar met een Cartesiaanse robot stelt het ondersteuningssysteem hem in staat om moeiteloos dezelfde lading te hanteren zonder dat er extra hulp of componenten nodig zijn, waardoor het de ideale pick and place industriële robot is. .
Oriëntatie

Bron:Pinterest
Oriëntatie is een ander gebied dat de robots van elkaar onderscheidt. Als het gaat om oriëntatie, zijn er twee belangrijke dingen die opvallen.
Het doel hier is om de voetafdruk van de robot af te stemmen op zijn werkgebied. Als bijvoorbeeld een Zes-assige robot of een SCARA-robot zorgt voor enorme hinder tijdens het werken, dan is het gebruik van dergelijke robots in die situatie niet ideaal. Als de beweging echter het minste aantal assen vereist, is een Cartesiaanse robot een betere gok, omdat deze boven het hoofd kan worden gemonteerd, zodat er beneden genoeg ruimte overblijft voor andere dingen.
Tegelijkertijd, als de taak in kwestie een complexe afhandeling omvat of het werk is dat meer assen nodig heeft, dan is er een SCARA robot die de minste ruimte kan innemen maar toch het meeste aantal assen kan gebruiken, zou de betere optie zijn. Oriëntatie hangt grotendeels af van de ruimte en de aard van de taak.
Snelheid en reizen

Bron:Pinterest
Een snelle robotarm is een belangrijke factor als het gaat om het onderscheiden van industriële robots . Er zijn sommige taken die hoge snelheden vereisen en andere die precisie vereisen om voorrang te krijgen. De snelheid van een robot is niet alleen beperkt tot het hanteren van materialen; het is ook gebaseerd op de afstand die het aflegt rond de beschikbare ruimte.
Cartesiaanse robots kunnen versnellen met ongeveer 5 m/sec, soms zelfs meer, als ze kleiner en wendbaarder zijn. SCARA- en Six-Axis-robots zijn veel langzamer in vergelijking daarmee. Een ander kenmerk dat Cartesiaanse robots in dit opzicht superieur maakt, is het feit dat ze kunnen worden aangepast om meer afstand af te leggen bij hogere snelheden als ze worden gecombineerd met de juiste inzet, balschroefactuator of een lineaire motor.
Cartesiaanse robots zijn verankerd aan een flexibele bovenrail , die kan worden uitgebreid tot grote afstanden, waardoor ze goede industriële robottypes zijn . SCARA- en Six-Axis-robots daarentegen zijn bevestigd op sokkels die zelden bewegen.
Positienauwkeurigheid

Wat de nauwkeurigheid betreft, zijn SCARA- en Six-Axis-robots iets nauwkeuriger dan hun Cartesiaanse tegenhangers. Als een Cartesiaanse robot hetzelfde nauwkeurigheidsniveau wil klokken, moeten ze worden uitgerust met extra componenten en onderdelen die die functie verbeteren. De genoemde onderdelen omvatten kogelschroefactuators en nauwkeurig bewerkte kogelrailtafels.
Tegelijkertijd zijn er gevallen waarin SCARA- en Six-Axis-robots hun nauwkeurigheid niet kunnen behouden vanwege robotarm afbuiging. In dergelijke gevallen kunnen Cartesiaanse robotarmen met uiterst nauwkeurige lineaire lagers die doorbuiging minimaliseren, waardoor de eindeffector nauwkeuriger kan worden gepositioneerd, is een betere optie. Uiteindelijk zijn de snelheden van elk van deze robots afhankelijk van de taak die ze uitvoeren.
De omgeving

Bron:Pinterest
De werkomgeving en de aanwezige gevaren zijn nog twee factoren die kunnen worden gebruikt om deze drie robots van elkaar te onderscheiden. Voor SCARA en 6-assige robots , hun sokkels zijn compact, waardoor ze de minste ruimte innemen; deze vaste aard kan ze echter overbodig maken in een omgeving waar het ondersteuningsframe van de robot boven het hoofd kan worden geïnstalleerd, zoals in het geval van een cartesiaanse robot.
Stof en vuil hebben ook invloed op het type robot waar mensen voor kiezen. SCARA- en Six-Axis-robots zijn gevoeliger voor stof dan Cartesiaanse robots, die meer bewegingen gebruiken. Robots kunnen worden afgedekt om corrosie door stof en eerst in hun bewegende delen tot een minimum te beperken, maar deze zullen uiteindelijk een efficiënte beweging belemmeren.
Topfabrikanten van industriële robots

Na gekeken te hebben naar de verschillen die SCARA onderscheiden, is een Six-Axis robotarm , en cartesiaanse robots, is het ook van vitaal belang om de fabrikanten te kennen die achter hun creaties staan. Hier volgen enkele van de beste industriële fabrikanten van robotarmen ter wereld.
EPSON

Bron:Epson
EPSON is een robotfabrikant die al meer dan 35 jaar in het vak zit. Ze zijn vooral bekend om de topklasse Zes-assige robots die zijn uitgerust met de meest geavanceerde robottechnologie bovenop hun vermogen om enorme ladingen aan te kunnen. Hun zesassige robots hebben een laadvermogen van ongeveer 10 pond en een robotarm bereik van 450 mm tot 1.480 mm. De EPSON RC+-software die in al hun robots wordt gebruikt, heeft Vision- en Force Guidance-functies voor betere functionaliteiten.
EVS

EVS is een wereldleider als het gaat om de creatie van industriële robots. Als toonaangevende SCARA robotfabrikant Onder hun opvallende producten behoren hun SCARA-modellen tot de meest geavanceerde in de branche. Hun catalogus bevat twee geavanceerde SCARA-robots, een kleinere met een laadvermogen van 5 pond en een armbereik van 400 mm, en een veel grotere met een laadvermogen van 8 pond en een armbereik van 600 mm.
Er is wereldwijd veel vraag naar de meeste EVS-robotarmen en ze worden veel gebruikt in de auto- en ruimtevaartindustrie vanwege hun hoge snelheden, geavanceerde technologieën en ingenieuze ontwerpen.
Yamaha Motor Corporation

Bron:yamaha- motor.com
Yamaha Motor Corporation is 's werelds toonaangevende fabrikant van cartesiaanse robots. Yamaha Corporation, vooral bekend om zijn superbikes die in veel internationale races worden gebruikt, is ook een prominente fabrikant en leverancier vanindustriële robots met een bijzondere focus op cartesiaanse. Hun catalogus bevat alle soorten cartesische robots. Het bedrijf maakt ook SCARA-robots en enkelassige.
Conclusie
Terwijl de raderen van de technologie blijven draaien, komen er steeds meer verfijnde versies van industriële robots worden nog steeds elk jaar uitgebracht. Met elk nieuw model worden de zwakke punten die de vorige versies plaagden kleiner en kleiner. Het is slechts een kwestie van tijd voordat elk aspect van het menselijk leven volledig afhankelijk zal zijn van industriële robots. Of dat een goede of een slechte zaak zal zijn, moet nog worden bepaald.
Industriële robot
- Wat is het echte verschil tussen een autonome robot en een HMI?
- Verschil tussen asbest en glasvezel
- Verschil tussen structuur en unie
- Verschil tussen C en C ++
- Verschil tussen C en Java
- Python versus JavaScript:verschil tussen JavaScript en Python
- Python versus Ruby:verschil tussen Ruby en Python
- Python 2 versus Python 3:Wat is het verschil tussen Python 2.x en Python 3.x?
- Het verschil tussen gelijkstroom- en wisselstroommotoren
- Verschil tussen solderen en solderen
- Verschil tussen 2-takt en 4-takt motoren