


Het minimaliseren van het geluid en de trillingen van de stappenmotor in Precision Motion Control-toepassingen
Stappenmotoren werken goed in een breed scala aan toepassingen, maar kunnen moeite hebben met koppelrimpels en problemen met stroomvervorming. Lees meer over QuietStep, een eigen algoritme van Allegro MicroSystems, als mogelijke oplossing.
Stappenmotoren bieden in veel toepassingen unieke voordelen ten opzichte van gelijkstroom- (DC) en borstelloze DC-motoren (BLDC). Een bipolaire stepper biedt een nauwkeurige open-luspositie en een koppel zonder snelheid zonder gebruik te maken van een regellus of externe sensoren. Met hun gecontroleerde stapmogelijkheden werken stappenmotoren goed in een breed scala aan precisie-bewegingsbesturingstoepassingen, waaronder gesloten tv's (CCTV), 3D-printers, computer numerieke besturing (CNC), textielproductieapparatuur en pick-and-place-machines.
Succesvolle inzet van stappenmotoren vereist effectief beheer van geluid en trillingen. In CCTV-toepassingen worden trillingen bijvoorbeeld direct vertaald naar de beeldsensor en gimbal. Grote zoom in combinatie met beweging kan het beeld vervormen. Bij 3D-printen kan motorresonantie of overshoot veroorzaakt door hoge koppelrimpels resulteren in veel ongewenste printartefacten. In de meeste gevallen resulteert het verminderen van motortrillingen in een betere beeldkwaliteit of nauwkeuriger 3D-printen. Het verminderen van motortrillingen zorgt ook voor een stillere algehele werking.
Geavanceerde technologieën op basis van gepatenteerde algoritmen zijn nu beschikbaar om geluid en trillingen in stappenmotorontwerpen te minimaliseren door koppelrimpel en stroomvervorming te verminderen. Voordat u zich verdiept in deze motion control-oplossingen, is het handig om te begrijpen wat trillingen en op zijn beurt hoorbare ruis veroorzaakt. Laten we eerst eens nader bekijken hoe een stappenmotor werkt.
Stepper Fundamentals
Een bipolaire stappenmotor is een gelijkstroommotor met discrete poolposities die zijn opgebouwd uit meerdere spoelen die zijn gerangschikt in twee groepen die fasen worden genoemd. De stroomverhouding tussen de twee fasen bepaalt hoe de rotor tussen de twee wikkelingen wordt geplaatst. Op deze manier kan een stappenmotor zijn positie tussen twee polen verdelen in kleinere stappen die microstappen worden genoemd.
De stroom in elke stappenmotorwikkeling kan worden opgeteld om een vector te creëren waarbij de grootte van de vector het koppel is. Door de stroom in elk van de twee fasen in de polaire ruimte te onderzoeken, kunnen we de vector visualiseren terwijl deze door elke elektrische cyclus draait.
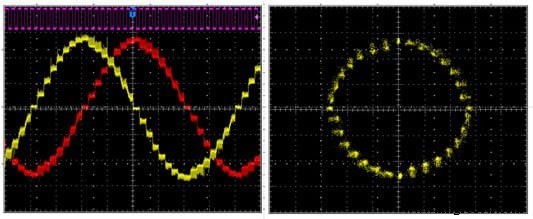
Figuur 1. Fasestroom in elk van de twee wikkelingen van een bipolaire stappenmotor in 1/8ste stap (links). Fasestroom in elk van de twee wikkelingen van een bipolaire stepper in 1/8ste stap maar weergegeven in het polaire domein (rechts).
In het op tijd gebaseerde domein (Figuur 1 links), wordt het koppel gedefinieerd als de som van het gebied onder de twee curven. In het polaire domein (Figuur 1 rechts) is de grootte van de vector het koppel. In deze afbeeldingen kunnen we zien dat het koppel constant is terwijl het veld door elke elektrische cyclus beweegt. Wanneer het koppel niet constant is, ervaart het systeem trillingen en hoorbaar geluid.
Ervan uitgaande dat de motor niet op resonantie werkt, wordt de koppelrimpel de grootste bron van hoorbare ruis en trillingen in een stappenmotor.
Een stappenmotor besturen (stroombesturing)
Pulsbreedtemodulatie (PWM) stroomregeling is de meest gebruikelijke manier om een stepper aan te drijven. Door stroomregeling te implementeren, hakt de controller PWM de output, waardoor de stroom in elke wikkeling wordt beperkt om een verhouding te behouden die de rotorpositie definieert.
De aard van PWM-stroomregeling resulteert in stroomrimpeling op basis van de toegepaste inschakelduur, de inductantie van de motor en de spanning erover. Om de rimpel te minimaliseren, kan de controller beheren hoe de stroom in de wikkelingen afneemt door verschillende vervalmodi te implementeren.
Laten we de algemene vervalmodi bekijken voor een enkele PWM-cyclus, te beginnen met het opvoeren van de aandrijfstroom.
Na de drive, weergegeven in figuur 2A, wordt de vervalmodus geïmplementeerd tijdens PWM-off-time via twee synchrone methoden die worden weergegeven in figuur 2B en 2C.
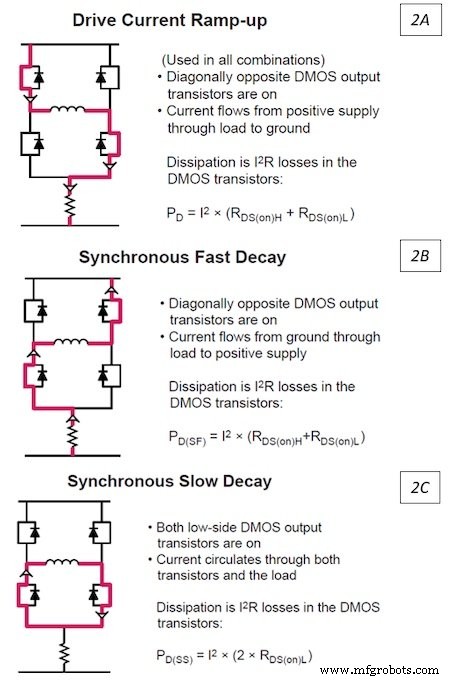
Figuur 2. Huidig pad in volledige brug met drive- en decay-modi.
Snel verval zorgt voor een optimale stroomregeling, maar resulteert in een hoge rimpel. Langzaam verval resulteert in een lage rimpel, maar de snelheid van verval is onderhevig aan de elektromotorische kracht (BEMF) van de motor, die in sommige gevallen stroomstoringen kan veroorzaken.
Figuur 3A laat zien wat er kan gebeuren bij 100 procent langzaam verval. Wanneer de wikkelstroom daalt, kan langzaam verval de stroom niet snel genoeg verminderen, waardoor vervorming op de dalende flank ontstaat. Figuur 3B toont de effecten van het gebruik van 100 procent snel verval. De rimpelstroom is veel groter, maar de regelaar houdt de stroom nauwkeurig onder controle.
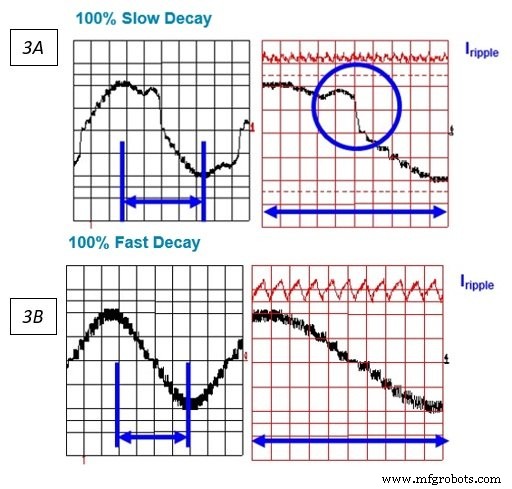
Figuur 3A. Langzaam verval kan vervorming veroorzaken wanneer de stroom in belasting afneemt.
Figuur 3B. Snel verval veroorzaakt een grote rimpelstroom, wat kan resulteren in trillingen en hoorbare ruis.
We kunnen de in figuur 1 getoonde effecten vermijden en ook een redelijke rimpelstroom handhaven door een compromis te bereiken. Wanneer de stroom in de belasting afneemt, implementeert de driver een combinatie van snel en langzaam verval, ook wel gemengd verval genoemd. De uit-tijd is verdeeld in een deel van snel verval en een deel van langzaam verval, zoals weergegeven in figuur 4. Wanneer de stroom in de belasting toeneemt, minimaliseert langzaam verval de rimpel.
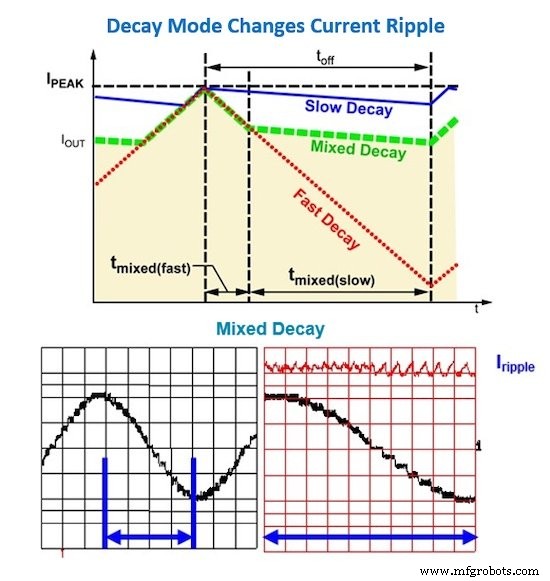
Figuur 4. Gemengd verval minimaliseert de rimpel en behoudt tegelijkertijd de controle over de stroom in de wikkeling.
Afhankelijk van de kenmerken van een stappenmotor en zijn LR-tijdconstante, kan langzaam verval op de stijgende flank problemen veroorzaken bij lage stromen waarbij de snelheid van verandering in stroom te snel is voor de PWM-controller om te regelen naar lage stromen als gevolg van blanking van de stroomdetectieversterker. Dit scenario kan leiden tot stroomvervorming wanneer de stroom in de belasting toeneemt, zoals weergegeven in afbeelding 5.
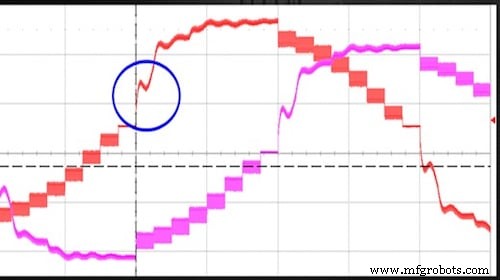
Figuur 5. Een langzaam verval op de stijgende flank kan vervorming veroorzaken bij motoren met bepaalde LR-karakteristieken.
Het is moeilijk om een eenvoudig compromis te bereiken dat voor alle bipolaire stappenmotoren werkt. Om deze problemen op te lossen met behoud van de laagst mogelijke rimpel, moet het systeem zich aanpassen aan verschillende motorkarakteristieken.
Een nieuwe benadering om de koppelrimpel te verminderen
Allegro heeft een manier geïntroduceerd om koppelrimpels en stroomvervorming voor stappenmotortoepassingen te verminderen. Deze innovatie, QuietStep genaamd, is nu beschikbaar als optie op Allegro's nieuwste A5984 stappenmotordriver.
QuietStep-technologie maakt gebruik van een eigen algoritme dat dynamisch het percentage snel verval dat nodig is per cyclus aanpast (omhoog of omlaag) om de best mogelijke prestaties te bereiken onder alle bedrijfsomstandigheden zonder gebruik van complexe software.
Het algoritme keert de traditionele benadering van gemengd verval om door eerst langzaam verval te implementeren, gevolgd door snel verval. Figuur 6A toont traditioneel gemengd verval met het vaste gedeelte van snel en langzaam verval en met snel verval dat de PWM-off-time-cyclus start. Afbeelding 6B laat zien hoe langzaam verval begint bij gebruik van QuietStep aan het begin van de PWM-off-time-cyclus. QuietStep past automatisch de verhouding van snel en langzaam verval aan om de stroomrimpel te minimaliseren en tegelijkertijd een nauwkeurige stroomregeling te behouden.
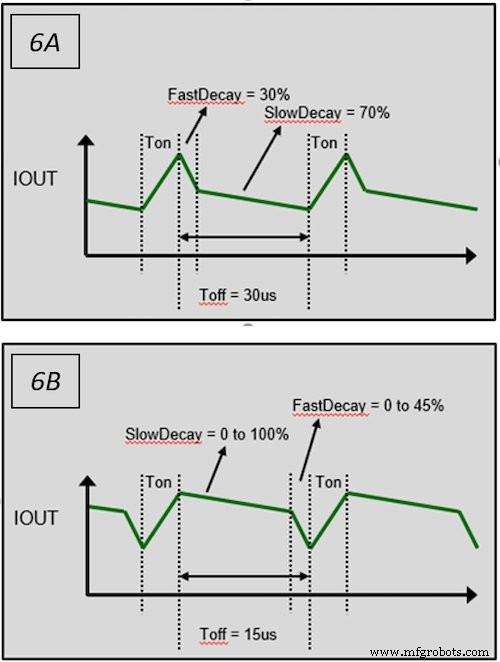
Figuur 6A. Traditioneel gemengd verval waarbij de verhouding tussen snel en langzaam verval vastligt.
Figuur 6B. QuietStep kan de verhouding tussen snel en langzaam verval dynamisch aanpassen om de stroom onder controle te houden en de stroomrimpel te minimaliseren.
Snel verval wordt alleen geïntroduceerd wanneer dit nodig is voor stroomregeling, wat resulteert in de laagst mogelijke rimpelstroom. Figuur 7 toont de hoge rimpelstroom als gevolg van vast gemengd verval met afnemende stroom en verlies van stroomregeling met langzaam verval met toenemende stroom. QuietStep-technologie elimineert deze effecten door de rimpelstroom te halveren in vergelijking met gemengd verval. Wanneer de stroom toeneemt, handhaaft QuietStep de stroomregeling tot nul ampère.
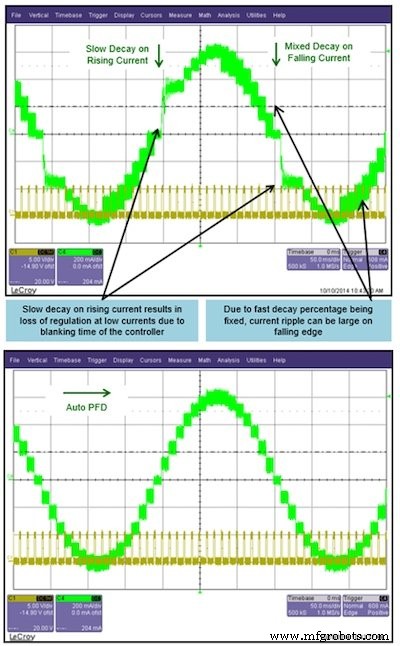
Figuur 7. Traditioneel langzaam verval met toenemende stroom en gemengd verval voor afnemende stroom resulteert in verlies van regulering bij stijgen met toenemende stroom en grote rimpel bij afnemende stroom. QuietStep biedt uitstekende stroomregeling met toenemende stroom terwijl de rimpelstroom gedurende de gehele elektrische cyclus laag blijft.
Het verminderen van stroomrimpeling en resonantie op systeemniveau minimaliseert trillingen en hoorbaar geluid veroorzaakt door trillingen. Het resultaat is betere videobeelden in CCTV-systemen en superieure printkwaliteit in 3D-printers.
Het verminderen van hoorbaar geluid en trillingen verbetert bijna elke motorbesturingstoepassing, van domotica deursloten en klepbesturing tot nauwkeurige zichtsystemen en 3D-printen. Allegro's QuietStep-technologie neemt het gedoe weg om te proberen de bron van geluid en trillingen in een systeem te bepalen. QuietStep is volledig geïntegreerd in de IC en is eenvoudig te implementeren, vereist geen programmering of externe componenten en is volledig automatisch.
QuietStep implementeren met bipolaire stappenmotorstuurprogramma's
Met microstepping motordrivers die deze geavanceerde technologie mogelijk maken, zoals de Allegro A5984, worden huidige golfvormen automatisch geoptimaliseerd over een breed scala aan stappenmotorsnelheden en kenmerken. Oplossingen voor stappenmotorbesturing, uitgerust met QuietStep-technologie, passen de hoeveelheid snel verval tijdens een PWM-cyclus aan om de stroomrimpel onder verschillende bedrijfsomstandigheden te minimaliseren.
De QuietStep-functie verbetert de systeemprestaties, wat resulteert in minder hoorbaar motorgeluid, minder trillingen en grotere stapnauwkeurigheid. Door gebruik te maken van deze technologie, is de A5984-driver ontworpen om bipolaire stappenmotoren te bedienen van full-step tot 1/32 step-modi en maakt een output-drive-capaciteit van maximaal 40 V en ± 2 A mogelijk. Over het algemeen zorgt het QuietStep-algoritme voor een eenvoudiger systeem ontwerp, implementatie en exploitatie.
Ga voor meer informatie over de A5984-driver en QuietStep-technologie naar de productpagina van de A5984.
Allegro MicroSystems is een wereldleider in stroom- en sensoroplossingen voor motion control en energiezuinige systemen. Bezoek de Allegro MicroSystems-website voor meer informatie.
Industrieartikelen zijn een vorm van inhoud waarmee branchepartners nuttig nieuws, berichten en technologie kunnen delen met lezers van All About Circuits op een manier waarop redactionele inhoud niet goed geschikt is. Alle brancheartikelen zijn onderworpen aan strikte redactionele richtlijnen met de bedoeling de lezers nuttig nieuws, technische expertise of verhalen te bieden. De standpunten en meningen in brancheartikelen zijn die van de partner en niet noodzakelijk die van All About Circuits of zijn schrijvers.
Industriële robot
- Toelatende en interlockcircuits
- Stappenmotoren
- ACS712-stroomsensorwerking en toepassingen
- Renesas breidt RX24T- en RX24U MCU-reeks voor motorbesturingstoepassingen uit
- Nanotec:compacte motorcontroller voor borstelloze gelijkstroommotoren en stappenmotoren
- Toepassingen en beperkingen van genetische algoritmen
- Hoe robot TIG-lassen precisie en kwaliteitscontrole toevoegt aan uw productie
- IQ Motion Control lanceert nieuwe reeks servomotoren
- Het grijze gebied tussen servo- en stappenmotoren
- Veiligheidsgeïntegreerde bewegingsbediening zorgt ervoor dat veiligheid en productiviteit naast elkaar kunnen bestaan
- Aansluitingen voor besturing:communicatie-interfaces voor positie- en bewegingssensoren