


Lelijke bug
Componenten en benodigdheden
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Apps en online services
 |
|
Over dit project
Achtergrond
Hier is een snelle en gemakkelijke kleine robot die met de juiste gereedschappen en onderdelen in ongeveer een half uur kan worden gebouwd en gemonteerd.
Ik heb het niet uitgevonden. Ik zag een video van zoiets op YouTube en dacht:'Hé, dat ziet er leuk uit, ik zal er een bouwen.'
Dus pakte ik wat servo's uit mijn junkbox, een oude batterij van een mobiele telefoon die ik had bewaard in de hoop er iets cools mee te doen, een Arduino Pro 3.3v die ik in een opwelling had gekocht omdat ik het quotum moest halen voor gratis levering en ging aan het werk.
Een uurtje of wat later was hij er dan!
Montage
Laten we beginnen met de basisassemblage.
Snijd de montagearm af die zich tegenover de kant bevindt waar de draden uitkomen op een van de servo's (dit wordt je achterste servo). De achterste servo wijst naar beneden en de andere naar voren. Je kunt lijm of kabelbinders gebruiken om ze bij elkaar te houden.

Haak vervolgens een rode en een zwarte draad aan de positieve en negatieve van de batterij van je mobiele telefoon (ik hield ze op hun plaats met wat elektricienstape). Als je een Li-Ion-batterij hebt, hoef je daar niet mee te worstelen :)
Daarna heb ik het mini breadboard op de batterij gelijmd. Dat hoeft natuurlijk niet. Het hangt ervan af of u van plan bent de onderdelen van deze robot ooit opnieuw te gebruiken of niet.
Kabelbind uw batterij en breadboard met de servoverbinding.
Snijd een wig in de pingpongbal. Klinkt makkelijk, toch? :) Het is misschien wel de moeilijkste stap van deze hele tutorial! Een pingpongbal is opvallend stevig en ook... rond. Om dingen heen te snijden heb je geduld nodig. En draag bril !!! Het maakt niet uit welk apparaat je gebruikt om het te snijden. Het plastic (of wat voor raar materiaal de mijne ook is gemaakt) splintert veel. Dus bril ! Ik wil dat je de rest van deze tutorial nog steeds kunt lezen nadat je klaar bent met knippen!
Controleer of je Arduino mooi in het gat past. En lijm dan de pingpongbal op de rest van het dier.
Voor de benen laat ik je aan je lot over. De mijne was een eenvoudig stuk staaldraad van 1 mm dik dat in en rond de vleugelbevestiging van de servo's was gebogen (zoals op de foto). Aan het einde van elke poot plaatste ik een kleine voet die uit een lijmpistoolstok was gesneden voor grip.
Verwarm de draad gewoon met een aansteker en plant hem in je geïmproviseerde voet. de lijm smelt bij contact en stolt heel snel weer.
Voordat je de poten aan de rest van het monster bevestigt, moet je het circuit maken en de schets op het bord laden. U moet dit lezen als u niet weet hoe u een schets naar de Arduino Pro Mini moet uploaden. https://www.arduino.cc/en/Guide/ArduinoProMini
De code voor deze is uiterst eenvoudig, dus ik ga er niet doorheen.
Het heeft een vertraging van 5 seconden aan het einde van de installatie, zodat je tijd hebt om je Arduino los te koppelen voordat de benen beginnen te bewegen, maar nadat ze zijn gecentreerd.
U kunt nu uw benen plaatsen en ze op hun plaats schroeven.
Als de pootjes eenmaal op hun plaats zijn geschroefd, kun je er zelfs voor kiezen om het programma te bewerken en de vertraging op regel 13 in te korten (of te verwijderen).
Demonstratie
Als alles goed is gegaan, zou je nu een schattige kleine jongen moeten hebben die er ongeveer zo uitziet:
En bekijk de Triceratops-video van ClaudioGasp in de reacties! Het is GEWELDIG!
Code
- Bug
BugArduino
#includeint FRONT =4;int BACK =5;Servo frontLegs, backLegs;void setup() { pinMode(13, OUTPUT); //Dit is alleen voor de mooie knipperende frontLegs.attach (FRONT); backLegs.attach(BACK); frontLegs.write(90); // Centreer de servo backLegs.write (90); // Centreer de servovertraging (5000); //Wacht 5 sec (dit geeft ons de tijd om de Arduino los te koppelen // zodat we de benen kunnen bevestigen.}void loop() {digitalWrite(13,HIGH); //LED on delay(200); frontLegs.write(70 ); // beweeg voorpoot een beetje vertraging (200); backLegs.write (70); // beweeg achterpoot een beetje digitalWrite (13, LOW); // LED uit vertraging (200); frontLegs.write (110); // beweeg voorste been een beetje vertraging (200); backLegs.write (110); // beweeg achterste been een beetje}
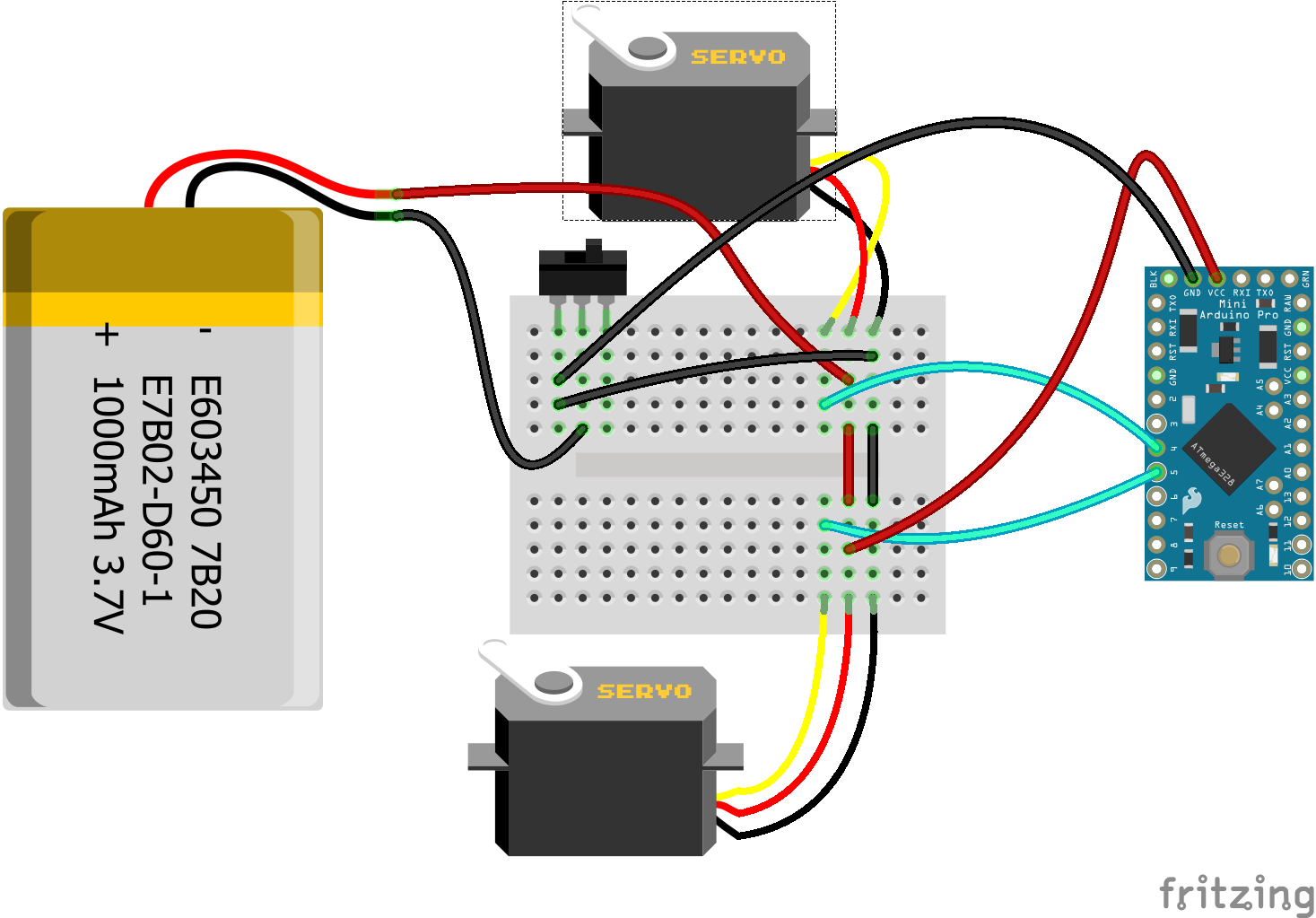
Schema's
bug_Yr3jFYFuNQ.fzzProductieproces