


Soorten industriële robots en hun verschillende toepassingen
Ontdek de vele soorten industriële robots en hun unieke mogelijkheden. Krijg een duidelijk inzicht in het gebruik en de toepassingen van elk type robot:robotarmen, mobiele robots, drones in de lucht, onderwaterrobots en cobots.
Hoe bepaal je welk type industriële robot de juiste keuze is?
Er zijn zoveel verschillende soorten robots op de markt. Hoe weet u welk type u moet gebruiken? Zoals bij veel ontwerp- en engineeringkwesties, "vorm volgt functie". Dat wil zeggen, welk type robot nodig is, hangt af van de beoogde functie. Wordt de robot aan de vloer of een ander oppervlak bevestigd, of moet hij mobiel zijn? Hoeveel eenheden per uur moet de robot kunnen verwerken? Wat is het maximale gewicht dat de robot moet tillen? Als de robot op één plek is vastgemaakt, hoe groot is dan de werkomhulling? Is de werkenvelop rechthoekig of rond? Door deze vragen te beantwoorden, worden uw keuzes snel beperkt en kunt u het ideale type industriële robot voor uw doeleinden selecteren.
In dit artikel onderzoeken we verschillende soorten robots, hun sterke en zwakke punten, en hoe we kunnen bepalen waarvoor we ze kunnen gebruiken.
Inhoud van dit artikel
- Stationaire robots (robotarmen)
- Autonome mobiele robots
- Vliegende robots (luchtdrones)
- Onderwaterrobots
- Hoe u het ideale robottype voor uw organisatie kunt vinden
Stationaire robots (robotarmen)
Er zijn zeven hoofdtypen stationaire robots op de markt. Met stationair bedoelen we robots die aan de vloer, het plafond of een ander oppervlak zijn vastgeschroefd - ze zijn niet mobiel. Over het algemeen zijn stationaire robots robotarmen die zijn ontworpen voor taken als picken en plaatsen, sorteren, assembleren, lassen en afwerken.
Hier bekijken we de verschillende soorten robotarmen en hun kenmerken en gebruik.
- Knikbare robotarmen
- Cartesiaanse of rechthoekige robots
- SCARA-robots
- Polaire of sferische robots
- Delta- of parallelle robots
- Gantry-robots
- Cilindervormig
- Samenwerkende robots/cobots
Gelede robotarmen
Voordelen: Meest flexibele beweging van alle typen robotarmen. Kan behoorlijk krachtig zijn, in staat om zware voorwerpen op te tillen.
Nadelen: Moet misschien worden omheind. Langzamer dan sommige van de andere robotarmen. Duurder dan andere robotarmen. Heeft meer geavanceerde controlesystemen nodig.
In vergelijking met andere typen robotarmen lijkt de beweging van een gelede robotarm het meest op een menselijke arm. Een typische scharnierarm heeft zes assen of gewrichten. Het kan minder of meer hebben, afhankelijk van de toepassing en fabrikant. Hoe meer gewrichten een robot heeft, hoe soepeler en minder "robotachtig" zijn beweging wordt. Deze flexibiliteit van beweging wordt beschreven door Degrees of Freedom.
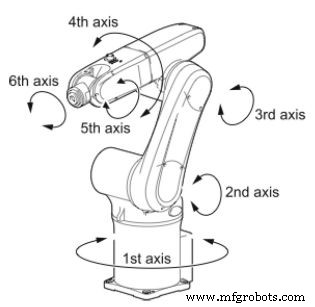
Interessant feit: Ontwerpers van kunstmatige handen beschouwen de menselijke hand als 27 vrijheidsgraden. Een menselijke arm heeft 7 vrijheidsgraden, voor een gecombineerd totaal tussen de menselijke arm en hand van 34 vrijheidsgraden.
Om alle subtiele manieren waarop de menselijke arm en hand kunnen bewegen na te bootsen, zou te duur en te complex zijn voor een industriële robot. Men is het er algemeen over eens dat 6 vrijheidsgraden in een industriële robotarm voldoende zijn om bijna elke taak uit te voeren die nodig is.
De robot kan geen piano spelen, maar dat hoeft ook niet!
Afhankelijk van de toepassing kan een robotarm worden uitgerust met een grijper, het robotequivalent van een hand. Meestal zijn robotgrijpers veel eenvoudiger dan de menselijke hand. Soms zijn ze zo simpel als een zuignap of een elektromagneet. Of misschien kan een zachte grijper met drie vingers worden gebruikt om delicate voorwerpen op te pakken, zoals verse producten of een ei. Er zijn veel verschillende soorten grijpers en er is nog geen enkele robotgrijper gevonden die alle toepassingen aankan.
Als alternatief kan de End of Arm Tooling (EoAT), zoals het wordt genoemd, een soort gereedschap zijn, misschien een roterend gereedschap dat een boor vasthoudt, of een ander soort bit, voor ontbramen, slijpen of frezen. Er zijn veel mogelijkheden, waaronder gespecialiseerde EoAT voor lassen, schilderen, schuren, lasersnijden en nog veel meer.
Gelede robots zijn zeer flexibel omdat al hun gewrichten kunnen draaien, in tegenstelling tot lineaire of translatieverbindingen, die alleen in een rechte lijn kunnen bewegen.
Gelede robots worden gebruikt in toepassingen zoals pick-and-place, booglassen, puntlassen, verpakken, machineonderhoud en materiaalbehandeling. Het vermogen om bogen (of soortgelijke patronen) te produceren op moeilijk bereikbare plaatsen, maakt gelede robots een goede kandidaat voor de auto-industrie en andere productie die dit vermogen vereist.
Historisch gezien waren grote en krachtige robots met scharnierarm die objecten van een ton of meer konden oppakken, niet uitgerust met sensoren waarmee ze zich bewust waren van hun omgeving. Als een persoon een dergelijke robot in de weg zou staan, zou hij ernstig gewond kunnen raken of zelfs gedood kunnen worden.
Als gevolg hiervan moeten dergelijke robotarmen worden gescheiden in een eigen ruimte. Alleen gekwalificeerd personeel dat de werking van de robot volledig begrijpt, mag de ommuurde of omheinde ruimte betreden waarbinnen dergelijke robots werken.
Als een gelede robotarm echter is uitgerust met de juiste sensoren en besturingssoftware, kan deze veilig om mensen heen werken. Als een dergelijke robot bijvoorbeeld computervisie gebruikt met een camera of misschien een LiDAR-sensor, voelt dat iets zijn bewegingspad in de weg staat, of zelfs dat een persoon of object nadert en nog niet in de weg staat, zal de robot kan vertragen of stoppen. Andere sensoren kunnen een botsing detecteren - als de arm ergens tegenaan stoot, stopt hij en/of keert hij om. Gewoonlijk zijn scharnierende armen die veilig naast mensen kunnen worden gebruikt, ontworpen om te worden beperkt in hun snelheid en kracht.
Cartesiaanse of rechthoekige robots
Voordelen: Eenvoudig besturingssysteem. Kan, afhankelijk van het model, zeer zware voorwerpen tillen. Nauwkeurig. Stijf in alle drie de assen. Minder duur dan gelede armen.
Nadelen: Kan geen roterende bewegingen maken.
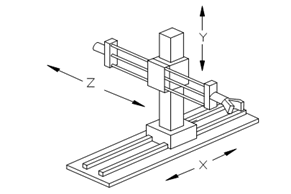
Deze robots gebruiken het cartesiaanse coördinatensysteem (X, Y en Z) voor lineaire bewegingen langs de drie assen (vooruit en achteruit, op en neer en van links naar rechts). Alle drie de gewrichten zijn translatie, wat betekent dat de beweging van het gewricht beperkt is tot een rechte lijn. Dit is de reden waarom dergelijke robots ook "lineaire" robots worden genoemd.
Cartesiaanse robots kunnen worden gebruikt voor pick-and-place, material handling, verpakkingsautomatisering, opslag en ophalen, snijden en boren en nog veel meer toepassingen.
Ze zijn stijf in alle drie de dimensies, waardoor ze zeer nauwkeurig en herhaalbaar zijn. Ze zijn eenvoudiger dan gelede robotarmen, hebben een eenvoudigere softwarebesturing en kunnen, afhankelijk van de toepassing, goedkoper zijn.
Gantry-robots - een soort cartesiaanse robot
Voordelen: Kan, afhankelijk van het model, zeer zware voorwerpen tillen. Kan desgewenst zeer groot worden gemaakt, over de gehele lengte van de faciliteit. Kan zeer kosteneffectief zijn voor de juiste toepassingen.
Nadelen: Kan geen roterende beweging maken.

Cartesiaanse of lineaire robots kunnen worden geconfigureerd als portaalrobots. Gantry-robots bewegen langs een bovengrondse baan. Afhankelijk van hun ontwerp kunnen portaalrobots zeer zware lasten aan en deze snel en nauwkeurig verplaatsen. Ze kunnen indien nodig ook zeer groot worden gemaakt, zodat ze het volledige vloeroppervlak van een faciliteit beslaan. Kleinere portaalrobots kunnen handig zijn voor pick-and-place en andere operaties die een hoge nauwkeurigheid en goede stijfheid vereisen.
Omdat het motion control-aspect van de lineaire robot relatief eenvoudig is, is het vaak goedkoper dan andere typen robots en kan het een zeer kosteneffectieve oplossing zijn voor veel automatiseringstaken.
De werkomhulling van een cartesiaanse robot is rechthoekig. Door de verticale beweging toe te voegen, heeft de werkenvelop de vorm van een doos.
SCARA-robots
Voordelen: Uitstekend geschikt voor vele montagetoepassingen. Snel en accuraat. Voordelig voor montagewerkzaamheden.
Nadelen: Niet zo flexibel als gelede armen. Niet zo nauwkeurig als cartesiaanse wapens. Niet zo snel als Delta-robotarmen.
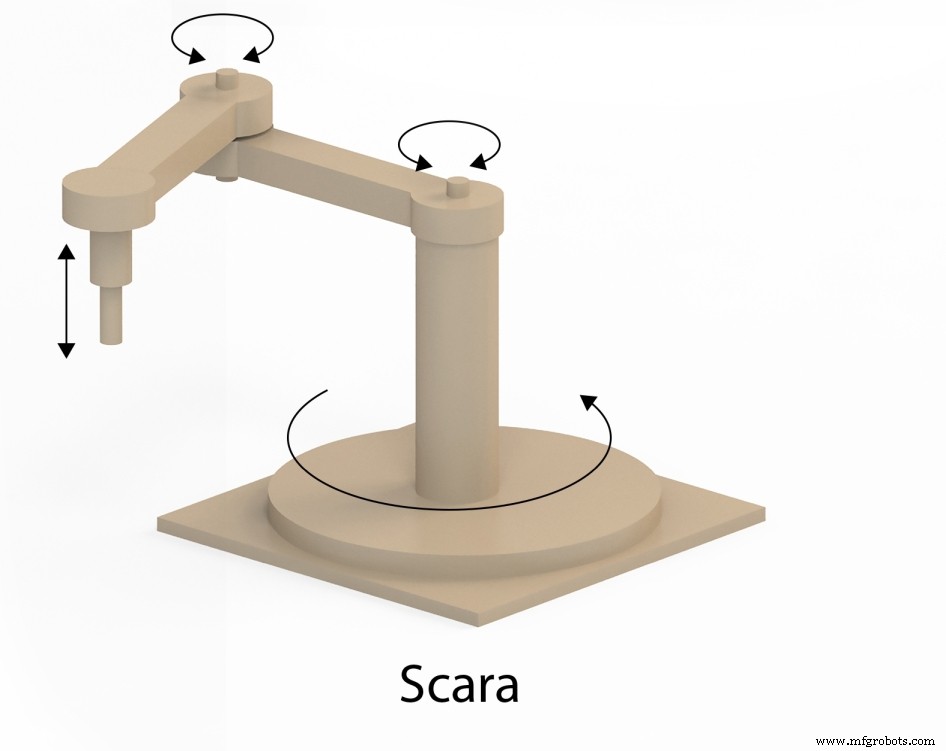
SCARA-robots (Selective Compliance Assembly Robot Arm) zijn vergelijkbaar met cartesiaanse robots omdat ze in 3 gewrichten of assen bewegen. In tegenstelling tot Cartesiaanse robots zijn twee van de gewrichten van SCARA-robots echter roterend. Ze zijn daarom in staat tot complexere bewegingen dan de cartesiaanse robots. Ze zijn over het algemeen sneller en hebben meer bewegingsflexibiliteit, maar zijn minder nauwkeurig dan cartesiaanse robots.
Interessant feit: Het wijdverbreide gebruik van SCARA-robots zorgde voor een revolutie in de kleine elektronica-industrie. Vanwege hun kleine voetafdruk, eenvoud en ontwerpkenmerken zijn ze bij uitstek geschikt voor deze toepassingsarena en hebben ze bewezen zeer kosteneffectief te zijn.
Zoals de 'assemblage' in de naam al aangeeft, is de SCARA-robotarm uitgevonden voor assemblagetoepassingen. De SCARA-robot is in 1981 gemaakt door Hiroshi Makino aan de Yamanashi University in Japan. De "compliance" in de naam verwijst naar een bepaalde hoeveelheid "geven". Dat wil zeggen, als je een SCARA-robot in het horizontale vlak duwt, zal hij een beetje meegeven - hij zal bewegen, hij is niet helemaal stijf. In het verticale vlak is een SCARA-robot echter behoorlijk stijf en zal hij niet "geven" als je hem in deze richting duwt. Daarom heeft het een "selectieve" naleving. Het is compliant in het horizontale vlak, en niet in het verticale vlak.
Selectieve compliantie is heel handig bij montagewerkzaamheden waarbij een onderdeel bijvoorbeeld in een printplaat moet worden gestoken. Bij dit soort montage moet vaak een onderdeel in een gat passen. Het centreren van het onderdeel in het gat vereist vaak een beetje "naleving" om het middelpunt te vinden - een beetje wiebelen of een beetje "geven". Vervolgens moet de inbrengkracht, die naar beneden beweegt, stevig en stijf zijn.
SCARA-robots zijn minder rigide dan Cartesiaanse robots en zijn ook beperkt tot het gewicht dat ze kunnen tillen, in vergelijking met de Cartesiaanse robot die behoorlijk zware voorwerpen kan tillen. SCARA-robots hebben een kleine footprint en worden over het algemeen gebruikt voor toepassingen waarbij de te verplaatsen afstanden relatief klein zijn. Ze hebben minder vrijheidsgraden dan de gelede armen. Aan de andere kant hebben ze een hoge mate van nauwkeurigheid en zijn ze redelijk herhaalbaar. En ze zijn minder duur dan een gelede arm.
Het werkbereik van een SCARA-robot is cilindrisch, wat ook een overweging is bij het overwegen van de toepassing. SCARA-robots zijn over het algemeen sneller dan scharnierende armen, hoewel niet zo snel als Delta-robots.
Polaire of sferische robots
Voordelen: Eenvoudiger besturingssysteem dan scharnierarm. Kan een groot bereik hebben. Zeer goed voor vele lastoepassingen. Kan sneller zijn dan de gelede arm.
Nadelen: Niet zo flexibel als gelede robotarmen. Oudere technologie. Heeft vaak een vrij grote footprint nodig. Niet zo snel als Delta-armen.
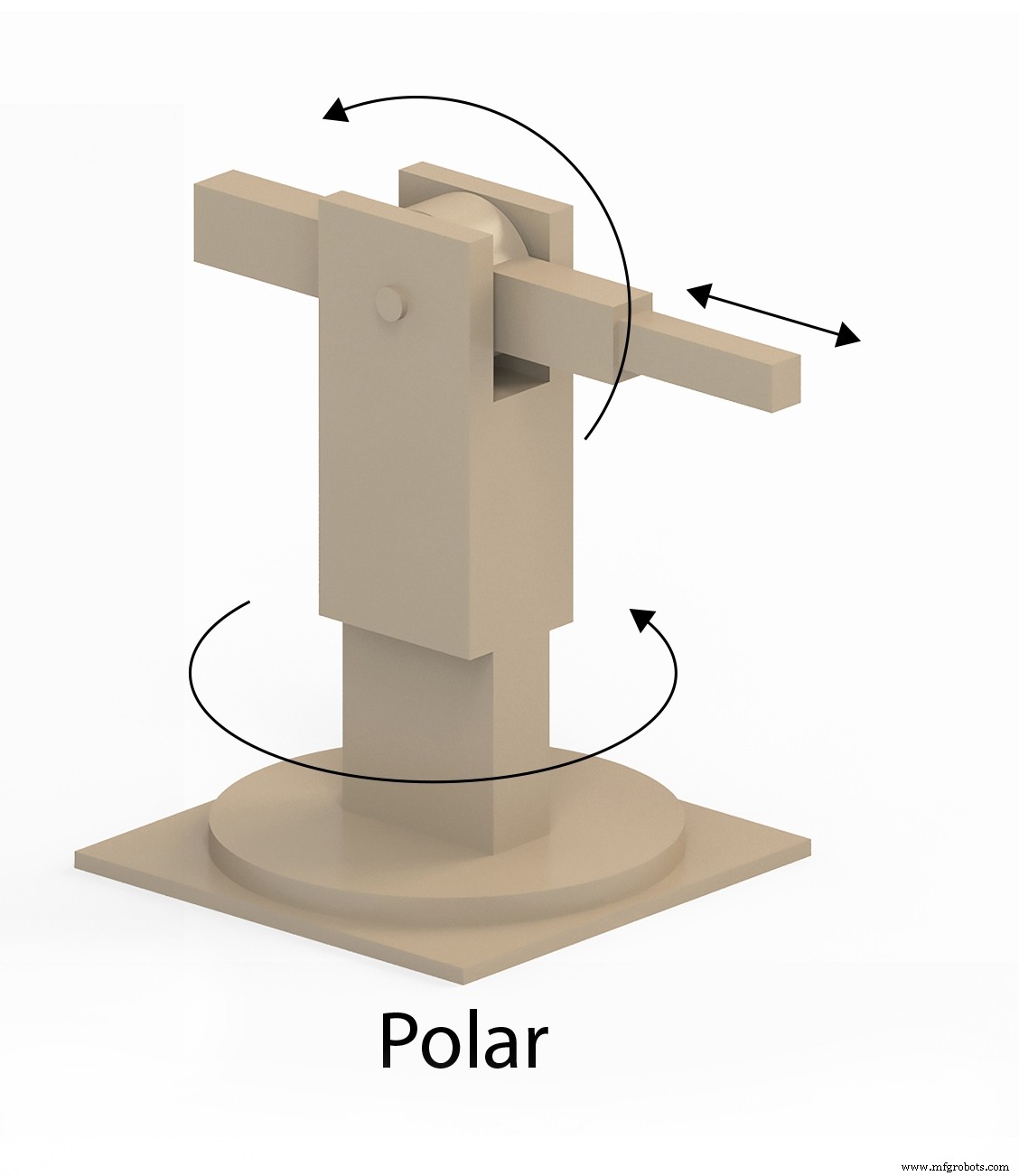
Polaire robots (soms sferische robots genoemd) hebben een combinatie van twee roterende gewrichten en één lineair gewricht. Hun ontwerp creëert een bolvormige werkruimte.
Interessant feit: De eerste industriële robot (gemaakt in de jaren 1950), genaamd "Unimate", was een bolvormige robot.
Polar-robots kunnen worden gebruikt voor spuitgieten, schilderen, booglassen en puntlassen. Ze kunnen een groot bereik hebben als ze zijn uitgerust met een lineaire arm van de juiste maat.
Polaire robots zijn een oudere technologie en kunnen worden vervangen door scharnierarmrobots (die ook een bolvormig werkbereik hebben), hoewel de polaire robot in sommige toepassingen nog steeds kosteneffectiever kan zijn dan zijn alternatieven.
Delta-robots
Voordelen: Snelste ontwerp van robotarmen voor pick-and-place-bewerkingen. Lichtgewicht. Nauwkeurig.
Nadelen: Beperkt tot relatief kleine en lichtgewicht objecten. Niet geschikt voor het werken aan objecten in een verticaal vlak. Beperkt bereik.
Delta-robots (ook wel parallelle robots genoemd) hebben drie robotarmen in de vorm van parallellogrammen. Meestal bevindt de deltarobot zich boven de werkstukken, bevestigd aan een bovenliggende bok. Doordat alle motoren op de basis staan, zijn de gewrichten en armen van de robot erg licht in vergelijking met andere robots. De Delta-robot heeft een omgekeerde koepelvormige werkomhulling.
Interessant feit: De Delta-robot is oorspronkelijk ontworpen om een chocoladefabrikant in staat te stellen stukjes chocolade op te pakken en in een doos te doen.

Het ontwerp van de Delta-robot resulteert in een snelle en nauwkeurige bediening. Delta-robots worden voornamelijk gebruikt in pick-and-place-toepassingen. Bijkomende toepassingen zijn onder meer het doseren van lijm, solderen en monteren. Delta-robots kunnen geen zware ladingen dragen en dat beperkt de soorten End of Arm Tooling (EoAT) en de taken die ze aankunnen.
Hybride ontwerpen van Delta-robots plaatsen soms roterende gewrichten aan het uiteinde van de armen om de flexibiliteit van de beweging te vergroten.
Cilindrische robots
Voordelen: Onbuigzaam. Nauwkeurig. Perfect in toepassingen die een cirkelvormige geometrie vereisen.
Nadelen: Oudere technologie. Beperkte bewegingsvrijheid.
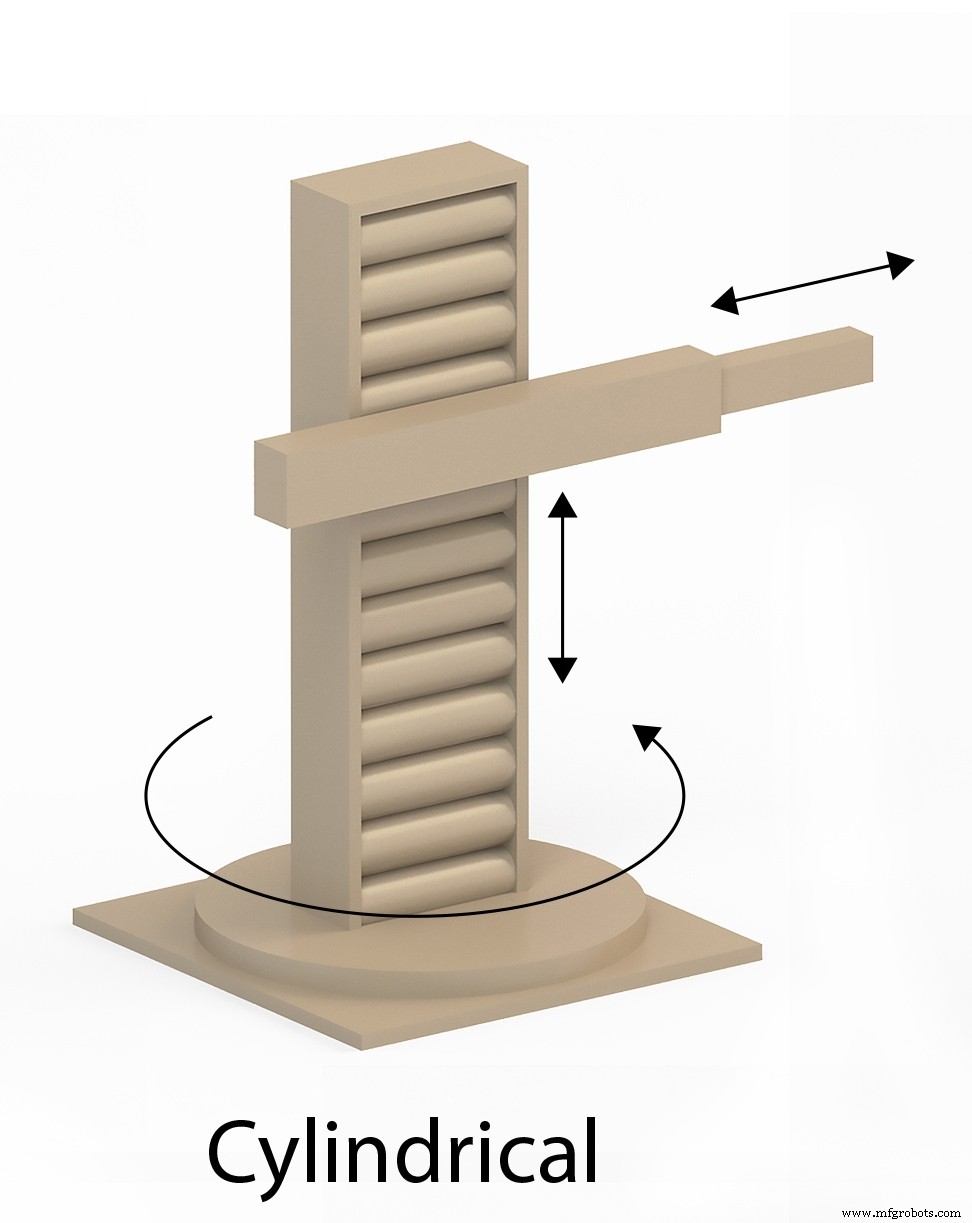
Cilindrische robots ten minste één roterende verbinding aan de basis en twee lineaire verbindingen hebben. Dit ontwerp leidt tot een cilindervormige werkruimte.
Cilindrische robots worden doorgaans gebruikt in krappe werkruimten en zijn perfect geschikt voor objecten die een cirkelvormige symmetrie moeten hebben (bijv. draden, leidingen). Slijp-, assemblage- en puntlastoepassingen maken gebruik van cilindrische robots.
Samenwerkende robots (cobots)
Voordelen: Veilig samenwerken met mensen. Moderne interfaces maken het mogelijk de robotarm te "leren" wat hij moet doen zonder code te schrijven.
Nadelen: Niet altijd de snelste soort robotarm. Beperkt in kracht en snelheid.
Collaboratieve robots (cobots) maken interactie tussen mens en robot mogelijk in een veilige werkomgeving, zonder dat er hekken of andere veiligheidsmaatregelen nodig zijn in traditionele industriële robottoepassingen. Veiligheidsmaatregelen leiden echter tot een afname van de werksnelheid.

Naast het feit dat het veilig is om naast mensen te werken, is een van de kenmerken die cobots meer collaboratief maken, het vermogen van een operator om de robotarm de bewegingen te leren die moeten worden gemaakt zonder programmeercode te hoeven schrijven. De operator grijpt de robotarm vast en beweegt deze fysiek zoals de robot moet gaan. De robotarm kan vervolgens de gedemonstreerde beweging nabootsen.
Een standaard cobot is doorgaans niet ontworpen om zeer zware voorwerpen te hanteren. Dit zorgt voor een beperking van het assortiment producten dat het kan beheren.
Collaboratieve robots hebben een breed scala aan toepassingen, zoals machineonderhoud, pick-and-place, assemblage en booglassen, maar zijn over het algemeen niet geschikt voor zware toepassingen of taken met zeer hoge snelheden.
Autonome mobiele robots

AMR's of Autonomous Mobile Robots vertegenwoordigen een snel groeiend segment van de industriële robotmarkt. Ze zijn er in vele soorten en maten, geoptimaliseerd voor de taken waarvoor ze zijn ontworpen.
Wielkarren
AMR's in de vorm van karren of voertuigen met wielen worden doorgaans gebruikt voor het transporteren van goederen binnen een fabriek of magazijn. Ze zijn uitgerust met sensoren, rekenkracht aan boord en elektromotoren waarmee ze zich door een faciliteit kunnen verplaatsen en er een interne kaart van kunnen maken. Dit wordt vaak gedaan met een persoon die de AMR volgt en deze op afstand bestuurt.
Nadat een interne kaart is gemaakt, kan de AMR worden geïnstrueerd naar de bestemmingen waarnaar hij moet reizen. Een belangrijk kenmerk van AMR's is dat ze onafhankelijk (“autonoom”) van de ene plaats naar de andere kunnen reizen, waarbij ze onderweg obstakels vermijden. Als een persoon, vorkheftruck of ander object hen de weg blokkeert, kunnen ze uitwijken om het obstakel te ontwijken of zelfs een geheel nieuwe route naar hun bestemming plannen.
De autonome mogelijkheden van AMR's maken ze zeer flexibel in vergelijking met een transportsysteem.
AMR's in de vorm van karren op wielen kunnen afzonderlijk worden gebruikt om goederen te vervoeren, en ze kunnen ook worden gebruikt als onderdeel van een zwerm of vloot van robots. Vloten van AMR's worden bijvoorbeeld gebruikt door Amazon. Amazon gebruikt een zogenaamde "goods to person"-configuratie, waarbij elke robot een hele plank met producten oppakt en naar een persoon in een orderverzamelstation brengt. De persoon pakt vervolgens het product of de producten uit het schap en plaatst deze in een container voor e-commerce orderafhandeling.
Recentelijk hebben vorderingen op het gebied van computervisie, kunstmatige intelligentie en grijpertechnologie het mogelijk gemaakt om de persoon bij het orderverzamelstation te vervangen door een gelede robotarm. In dit geval brengt de verrijdbare kar AMR de goederen naar de robotarm, voor een robot-naar-robot samenwerking.
Autonoom geleide voertuigen (AGV)
AGV's hebben meestal de vorm van een voertuig met wielen en zijn een oudere technologie dan AMR's. Ze hebben minder intelligentie aan boord en zijn daarom niet zo autonoom als AMR's. AGV's hebben niet de mogelijkheid om een plattegrond van een voorziening te maken. In plaats daarvan vertrouwen ze op paden die voor hen zijn uitgestippeld. De paden worden bepaald door draden die in de vloer zijn geplaatst, of speciale tape of andere soorten geleiders. Als een AGV obstakels op zijn pad tegenkomt, kan deze alleen stoppen en om hulp roepen.
Het onderscheid tussen AGV's en AMR's wordt echter steeds vager. AGV's krijgen meer rekenkracht aan boord en sommige hebben nu de mogelijkheid om obstakels op hun pad te omzeilen.
AMR's met robotarmen
Een robotarm kan bovenop een AMR op wielen worden gemonteerd. Dit vergroot de flexibiliteit van de robot en de verscheidenheid aan taken die hij kan uitvoeren. Een toepassing is om zo'n robot te gebruiken voor het verzorgen van een hele rij werktuigmachines. De robot kan een voltooid onderdeel lossen en een nieuw onbewerkt werkstuk in één machine laden, en vervolgens de rij naar beneden verplaatsen en de bewerkingen herhalen voor een reeks machines.
Robots met poten
Miljoenen mensen hebben het YouTube-filmpje van dansende robots van Boston Dynamics gezien en hebben daarom tweebenige en vierbenige robots gezien. Een industrieel gebruik voor robots met poten wil ze inzetten voor pakketbezorging. Een ander gebruiksscenario is voor zoek- en reddingsoperaties.
Het gebruik van poten in plaats van wielen heeft bepaalde voordelen. Dankzij de poten kan de robot over bepaalde soorten terrein rijden die karren met wielen moeilijk of onmogelijk zouden vinden. Poten maken traplopen mogelijk en het in- en uitstappen van een voertuig gaat gemakkelijker dan een kar met wielen.
Sferische AMR's
Autonome mobiele robots in de vorm van een bol zijn in de handel verkrijgbaar en hebben speciale voordelen ten opzichte van andere vormfactoren. De systeemcomponenten van de bolvormige AMR zijn verzegeld in een duurzame schaal. Dit maakt ze in staat om in ruwe omgevingen te werken. Ze kunnen ook drijven en over water reizen. Sferische AMR's kunnen amfibisch zijn en zowel op het water als op het land reizen.
Het aandrijfsysteem van een sferische AMR is meestal gebaseerd op het verschuiven van het zwaartepunt.
De industriële toepassingen voor sferische AMR's zijn voornamelijk in bewaking en inspectie op afstand. Uitgerust met camera's en communicatie, kunnen ze video terugsturen naar de afstandsbediening. Voor vijandige omgevingen met mogelijk giftig gas of andere gevaarlijke omstandigheden, kan een sferische AMR ideaal zijn.
Vliegende robots (luchtdrones)
Unmanned Aerial Vehicles (UAV's) of drones worden steeds vaker gebruikt voor verschillende industriële doeleinden. Een toepassing is het gebruik van drones in magazijnen om te inventariseren. De drone kan door de gangpaden van het magazijn vliegen en computervisie gebruiken om het aantal items in dozen op de planken te tellen.

Afhankelijk van het ontwerp kan een industriële drone een soort Autonomous Mobile Robot (AMR) zijn, aangezien sommige modellen automatisch obstakels kunnen detecteren en vermijden, en onafhankelijk hun weg naar hun bestemming kunnen navigeren. Sommige industriële drones kunnen een "missie" krijgen, die kan bestaan uit vliegen over een mijnbouwoperatie of een infrastructuurproject. De drone vliegt autonoom zijn missie en kan video van het project opnemen, of bepaalde metingen doen en opnemen. Dergelijke drones kunnen worden gebruikt om de voortgang van bouwprojecten te volgen.
Amazon en andere bedrijven maken al beperkt gebruik van drones voor het bezorgen van duurzame goederen en boodschappen.
Onderwaterrobots

Er is een grote verscheidenheid aan robots die zijn ontworpen om onder water te worden gebruikt. Sommige onderwaterrobots zijn ontworpen om autonoom te zijn (Autonomous Underwater Vehicles - UAV's), en sommige zijn gemaakt om op afstand te worden bestuurd, draadloos of met een bekabelde kabel. Sommige onderwaterrobots gebruiken propellers als voortstuwingssysteem, vergelijkbaar met onderzeeërs. Aan de andere kant imiteren veel van dergelijke robots de actie van levende wezens voor hun voortstuwing. Sommigen bootsen de actie van dolfijnen na, anderen imiteren slangen en weer anderen bewegen zich als vissen. Het op deze manier nabootsen van de natuur wordt "biomimicry" genoemd omdat de actie van de robot biologische wezens nabootst.
Onderwaterrobots kunnen worden ingezet voor inspectie van offshore olieplatforms, pijpleidingen en voor wetenschappelijk onderzoek. Andere toepassingen zijn het gebruik van onderwaterrobots om de bodem van bruggen te inspecteren, de inlaten van hydro-elektrische dammen en het inspecteren van koraalriffen.
Onderwaterrobots worden door politiediensten gebruikt om video-opnamen te maken van de bodem van wateren op zoek naar bewijs. Het leger is ook geïnteresseerd in onderwaterrobots. Zou een sonarsysteem het verschil kunnen zien tussen een robotachtige "dolfijn" en een echte?
De voordelen van onderwaterrobots zijn talrijk. Dergelijke robots betekenen dat het niet nodig is om de risico's en kosten van menselijke duikers op zich te nemen. Robots kunnen langer onder water blijven dan mensen. Equipping underwater robots with sensors enables them to measure and record an almost infinite number and types of properties
How to source the ideal robot type for your organization
HowToRobot is a global platform helping companies to succeed with automation. By using the HowToRobot worldwide directory of over 15,000 robotics companies, you can find the type of robot you need, ideally suited for your application.
If you already know what type of robot you need, and want to get more information from robotics vendors, you can get quotes and receive product information and pricing from multiple vendors through HowToRobot.
If you are not sure what kind of robotic component or part you need and would like to simply describe your application and some of your Key Performance Indicators (KPIs) and goals you’d like to achieve through automation, you can submit a Request for Information and receive responses from vendors who can supply you information about their solutions.
Houd er rekening mee dat er onpartijdige HowToRobot-experts zijn die u kunnen helpen bij het navigeren door het proces. Klik hier om een consult met een deskundige adviseur op te zetten.
Industriële robot
- Verschillende soorten industriële ladders en hun toepassingen
- Soorten EOT-kranen en hun gebruik
- Verschillende aluminiumbronskwaliteiten en hun toepassingen
- 5 belangrijke industriële metaallegeringen en hun toepassingen
- Verschillende soorten stoten en hun gebruik
- Wat zijn de verschillende soorten stoten en hun gebruik?
- Verschillende soorten ponsgereedschappen en hun primaire toepassingen begrijpen
- Verschillende soorten non-ferro metalen en hun gebruik
- Verschillende soorten spuitgieten en hun toepassingen
- Verschillende soorten draaibankmachines en hun classificatie:
- Verschillende soorten meetinstrumenten en hun toepassingen