


Automatische sorteermachine – Mechatronics Student Project
Deze machine is gemaakt als een studentenproject voor het vak Constructie &CAD, aan de faculteit Werktuigbouwkunde in Skopje, door een team van vijf studenten.
Het is een machine die twee soorten platen sorteert. Een van de platen heeft gaten en de andere niet. Onze taak was om een machine te ontwikkelen die deze platen automatisch sorteert. We zijn met deze oplossing gekomen, die in feite de eerste plaats won van 25 andere machines.
Hoe het werkt
Zo werkt de Automatische Sorteermachine:
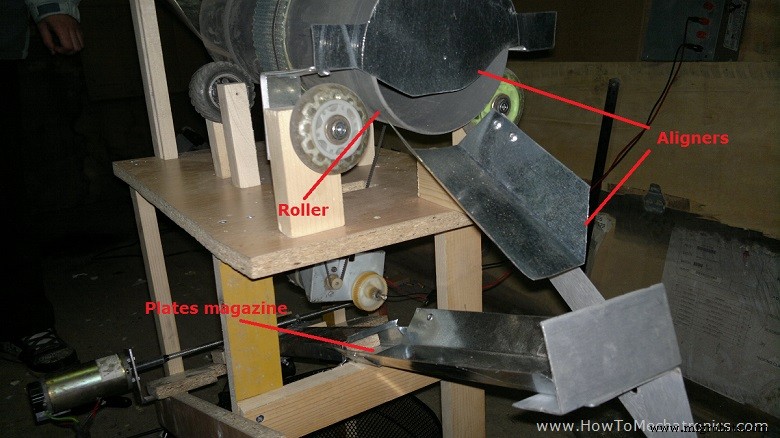
- De platen worden met de hand in de machine gevoerd.
- De rol lijnt de platen uit zodat ze één voor één in het platenmagazijn vallen.
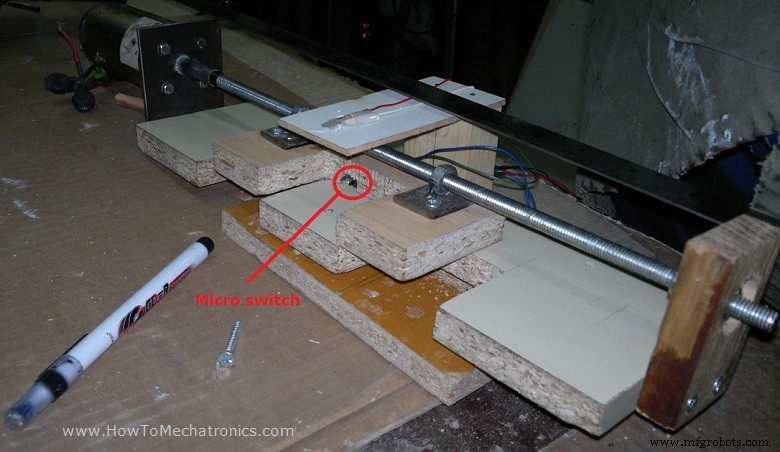
- Als de plaat de onderkant van de sorteerder bereikt, wordt een microschakelaar geactiveerd.
- Als de schakelaar aan staat, gaat de LED AAN.
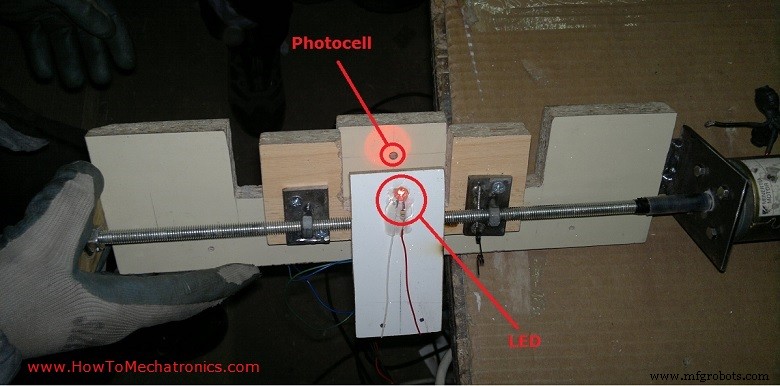
- Als de plaat een gat heeft, krijgt de fotocel meer licht en draait de motor naar één kant.
- Als de plaat geen gat heeft, krijgt de fotocel minder licht en draait de motor naar de andere kant.

Circuitschema
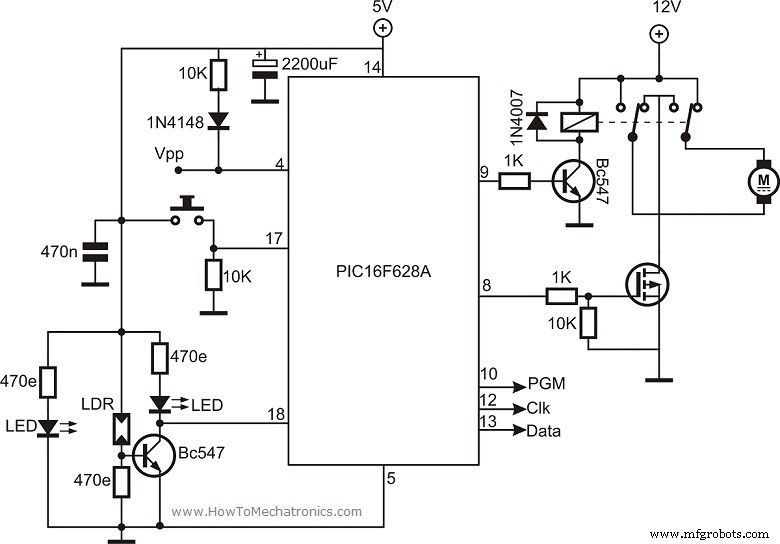
De machine gebruikt PIC16F628A microcontroller en is geprogrammeerd met MikroElektronika.
Broncode
/********************************************************************************/
/* Mechatronic Design Team */
/* Proekt po Konstruiranje i CAD */
/* "Dizajn i razvoj na nov ured za razdeluvanje na dva tipa plocki" */
/* */
/* */
/* */
/* Mikrokontroler: PIC16F628A */
/* Oscilator: Interen na 4MHz */
/* */
/* Dekemvri, 2012, Skopje */
/********************************************************************************/
void left () {
RB2_bit = 1; //motorot pocnuva da se dvizi na levo
delay_ms (500); // motorot se dvizi do krajna leva polozba
delay_ms (500);
delay_ms (500);
delay_ms (500);
PORTB = 0x00; //koga ke stigne do krajnata leva polozba se gasi
delay_ms (200); //vreme za kocenje na motorot
RB3_bit = 1; //se aktivira relejot za promena na nasokata
delay_ms (20);
RB2_bit = 1; //motorot pocnuva da se dvizi desno
delay_ms (500); //sredna pozicija na motorot
delay_ms (500);
delay_ms (500);
delay_ms (500);
PORTB = 0x00; //motorot se gasi koga ke dojde do sredina
delay_ms (150); //vreme za kocenje na motorot
}
//////////////////////////////////////////////////////////////////////////////
void right () {
RB3_bit = 1; //Se uklucuva relejot za promena na nasoka na motorot
delay_ms (30);
RB2_bit = 1; //motorot pocnuva da se dvizi desno
delay_ms (500);
delay_ms (500);
delay_ms (500);
delay_ms (500); //motorot se dvizi do krajna desna polozba
PORTB = 0x00; //koga ke stigne do krajna desna polozba se gasi
delay_ms (200); //vreme za kocenje na motorot
RB2_bit = 1; //motorot pocnuva da se dvizi levo
delay_ms (500); //sredna pozicija na motorot
delay_ms (500);
delay_ms (500);
delay_ms (500); //sredna pozicija na motorot
PORTB = 0x00; //motorot se gasi koga ke dojde do sredina
delay_ms (150); //vreme za kocenje na motorot
}
//////////////////////////////////////////////////////////////////////////////
void main() { //pocetok na glavna programa
TRISB = 0x00; //PORTB Izlezi
TRISA = 0xff; //PORTA Vlezovi
CMCON = 0x07; //gasenje na komparatori
do {
delay_ms (50);
PORTB = 0x00;
if (PORTA.b0==1) { //dali ima kocka?
delay_ms (100);
if (PORTA.b1==0) { //dali ima otvor?
left (); } //ako ima otvor dvizi se levo
else (right ()); }} //ako nema dvizi se desno
while (1); }Code language: Arduino (arduino)Productieproces