


Pathfinder
Componenten en benodigdheden
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 3 | |||
 |
| × | 1 | |||
 |
| × | 20 |
Benodigde gereedschappen en machines
 |
| |||
 |
|
Apps en online services
 |
| |||
 |
|
Over dit project
Samenvatting
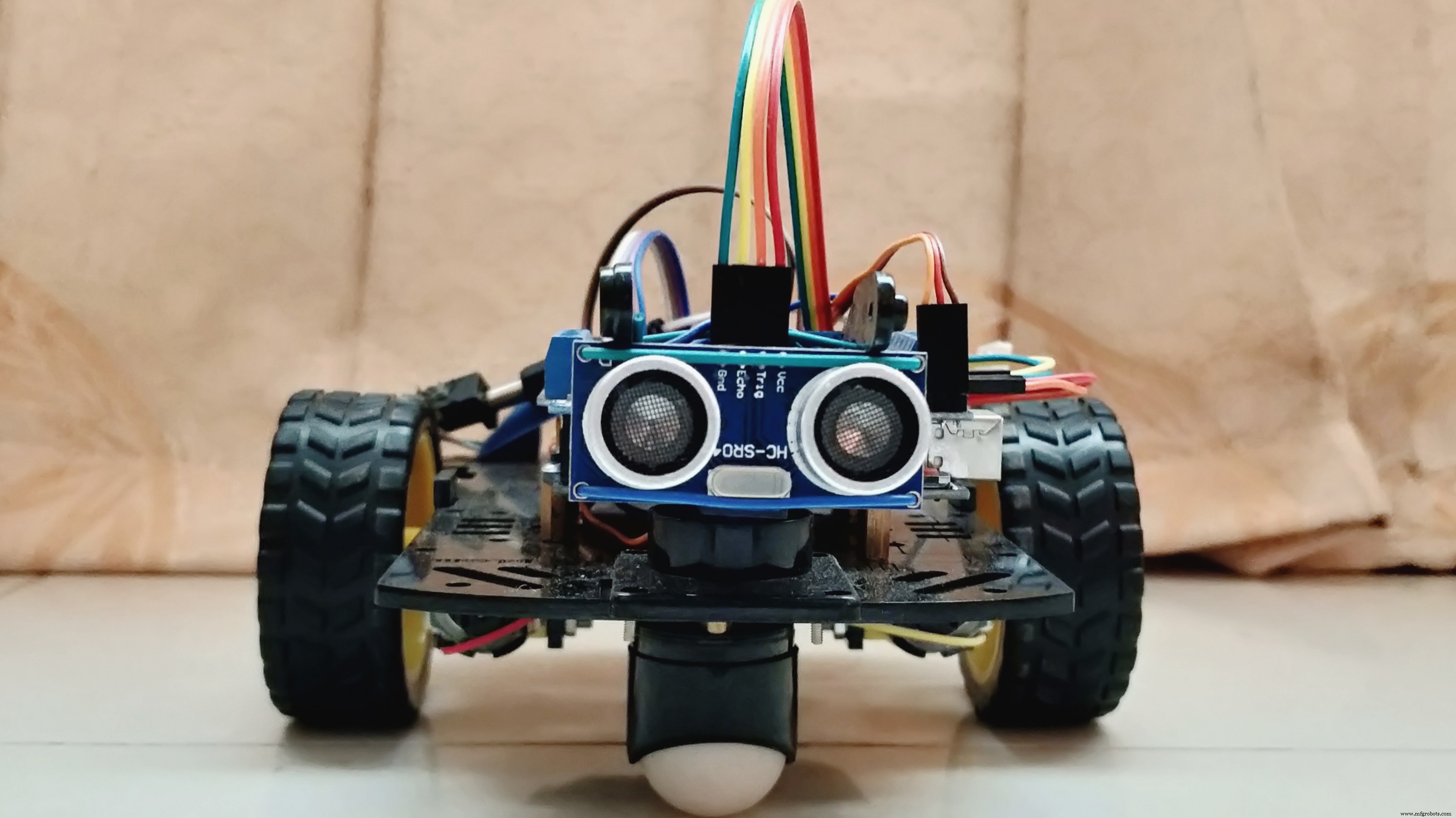
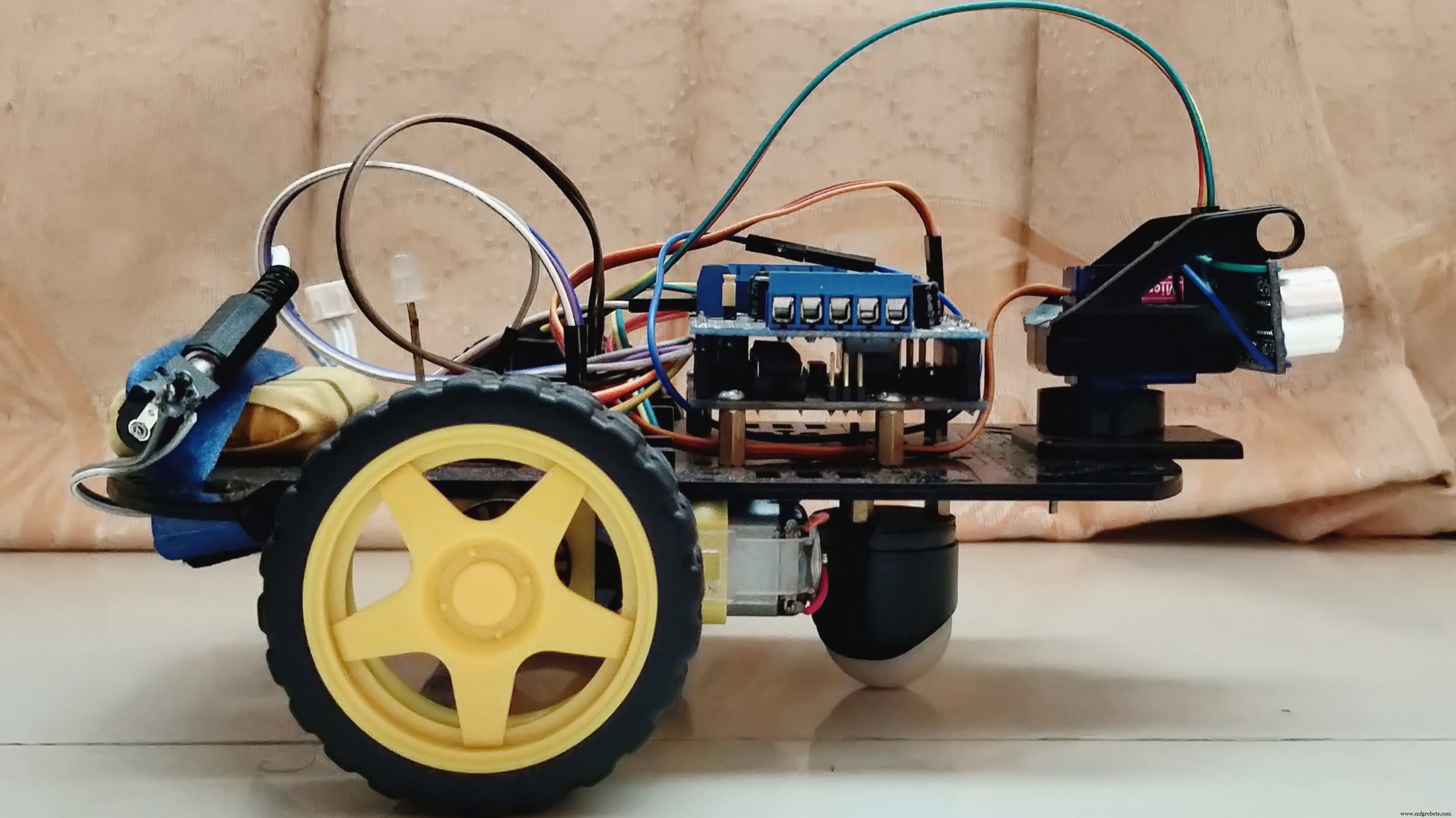
Het papier vertegenwoordigt het ontwerp van een obstakel vermijdende robot met het vermogen om objecten in zijn koers te detecteren en rond die objecten te navigeren door een juiste beslissing te nemen. Het demonstreert een roboteenheid op basis van Arduino UNO en Adafruit Motor Shield, waarbij de code is geschreven in Arduino IDE-software. Het vermijden van obstakels is een van de belangrijkste sleutelfactoren voor de ontwikkeling van mobiele robots. De implementatie van de ultrasone afstandssensor die op de micro-servomotor is geplaatst, leverde meer precisie op voor het detecteren van de omringende objecten. Deze ontworpen robot is anders dan andere beschikbare robots vanwege de integratie van een magnetische zoemer en een CC RGB diffuse LED, waardoor het de mogelijkheid heeft gekregen om objectdetectieprocedures aan te geven en de snelheid van DC-reductiemotoren in 4 soorten omstandigheden te regelen. Als een autonome robot werd het vermogen om door onbekende omstandigheden te manoeuvreren zonder enige impact te creëren benut. Bovendien kan deze ontworpen technologie worden ingezet voor militaire operaties en humanitaire hulp door de capaciteit van objectdetectie in diverse omgevingen te verbeteren.
Multimedia

Interpretatie
De meegeleverde bibliotheken die in blokcode zijn toegevoegd, zijn als volgt,
AFMotor.h
Servo.h De gedefinieerde verbindingen die in inline-code zijn toegewezen, zijn als volgt,
definieer BuzzPIN A0
definieer TrigPIN A1
definieer EchoPIN A2
definieer LEDBPIN A3
definieer LEDGPIN A4
definieer LEDRPIN A5
definieer DCMROFF 25
Het verwachte programma in de architectuur van de robot is als volgt,
- Mogelijkheid om objecten op zijn pad te detecteren binnen vooraf bepaalde afstanden.
- Zoek een nieuw pad in vergelijking met een open richting.
- Geef objectdetectie aan en regel de snelheid ervan.
Alle operaties zouden autonoom kunnen worden uitgevoerd zonder dat er enige externe controle nodig is.
Dit project presenteerde de essentiële details voor het ontwerpen van een mobiele robot die werd geïmplementeerd met het vermogen om obstakels te vermijden, zelfstandig te navigeren en de beweging van DC-reductiemotoren aan te geven door de selectieve kleur van een CC RGB diffuse LED in 4 verschillende situaties in te schakelen. De ontworpen robot vertoonde een verschil met andere robots die obstakels ontwijken in termen van licht-geluidsindicatie, motorsnelheidsregeling en intense manoeuvreertechniek door obstakels met een bereik van 180 graden voor de robot te detecteren; wat een moeilijke taak was om te combineren door een goede programmering. De robot is gebouwd op het Arduino UNO Rev3-platform met behulp van Arduino IDE v1.8.5-software voor de integratie van de juiste montagecode om de nodige functies te verwerven. Die integratie maakte de robot in staat om de benodigde handelingen zonder menselijke tussenkomst en met grote nauwkeurigheid uit te voeren. Met verdere ontwikkelingen door een uitzendcamera en draadloze technologie te combineren, kan deze robot effectief worden gebruikt voor militaire operaties om verschillende soorten activiteiten te detecteren, terwijl de basiseenheden nuttig kunnen zijn om mensen met een visuele of auditieve beperking te helpen de locaties van omringende objecten te melden.
Jongeren Zest Project Showcase
Code
- Programma
ProgrammaArduino
Het montageprogramma om deze autonome machine dienovereenkomstig in te stellen.#include// Add Adafruit Motor Shield for Arduino kit library.#include // Add Servo Motor library.#define BuzzPIN A0 // Wijs PIN A0 toe als BuzzPIN (Verbind Arduino UNO "A0" PIN met Buzzer "+" PIN).#define TrigPIN A1 // Wijs PIN A1 toe als TrigPIN (Verbind Arduino UNO "A1" PIN met Ultrasone Sonar Sensor "Trig" PIN).#define EchoPIN A2 // Wijs PIN A2 toe als EchoPIN (Verbind Arduino UNO "A2" PIN met Ultrasone Sonar Sensor "Trig" PIN).#define LEDBPIN A3 // Wijs PIN A3 toe als LEDBPIN (Verbind Arduino UNO "A3" PIN met RGB Diffused Common Cathode "LEDB" PIN).#define LEDGPIN A4 // Wijs PIN A4 toe als LEDGPIN (Verbind Arduino UNO "A4" PIN met RGB Diffused Common Cathode "LEDG" PIN).#define LEDRPIN A5 // Wijs PIN toe A5 als LEDRPIN (verbind Arduino UNO "A5" PIN met RGB Diffused Common Cathode "LEDR" PIN). #define DCMROFF 25 // Dit stelt Offset in om verschillen tussen de twee DC-tractiemotoren mogelijk te maken.AF_DCMo tor M1 (1, MOTOR12_64KHZ); // Creëer DCMotor #1 met behulp van M1-uitgang, ingesteld op 64 kHz PWM-frequentie. AF_DCMotor M2 (2, MOTOR12_64KHZ); // Creëer DCMotor #2 met behulp van M2-uitgang, ingesteld op 64 kHz PWM-frequentie. Servo SER1; // Maak een Servo-object om Servo.int Search (void) te besturen { // Integer type variabele declaratie. float Duur =0,0; // Variabele declaratie van het type Float. vlotter CM =0,0; // Variabele declaratie van het type Float. digitalWrite (TrigPIN, LAAG); // TrigPIN-uitgang als 0V (Logisch laag niveau). vertragingMicroseconden (2); // Vertraging voor 2us, stuur 10 ons hoge puls naar ultrasone sonarsensor "TrigPIN". digitalWrite (TrigPIN, HOOG); // TrigPIN-uitgang als 5V (Logisch hoog niveau). vertraging Microseconden (10); // Vertraging voor 10us. digitalWrite (TrigPIN, LAAG); // TrigPIN-uitgang als 0V (Logisch laag niveau). Duur =pulseIn (EchoPIN, HOOG); // Begin met het tellen van de tijd, tot weer EchoPIN terug naar logisch "High Level" en zet de "Time" in de variabele genaamd "Duur". CM =(Duur/58,8); // Zet afstand om in CM. retour CM; // Keer terug naar CM.}int RightDistance, LeftDistance; // Afstanden aan weerszijden.float Distance =0.00; // Variabele declaratie van het type float.void setup () { // Setup-lus. pinMode (BuzzPIN, UITGANG); // Verklaar BuzzPIN als "Uitvoerpincode". pinMode (TrigPIN, UITGANG); // Declareer TrigPIN als "Uitvoerpincode". pinMode (EchoPIN, INPUT); // Declareer EchoPIN als "Uitvoerpincode". pinMode (LEDBPIN, UITGANG); // Verklaar LEDBPIN als "Uitvoerpincode". pinMode (LEDGPIN, UITGANG); // Verklaar LEDGPIN als "Uitvoerpincode". pinMode (LEDRPIN, UITGANG); // Declareer LEDRPIN als "Output PIN". SER1.bijvoegen (10); // Bevestigt de servo op pin 10 (SER1 op de Adafruit Motor Shield voor Arduino-kit aan het Servo-object).} ongeldige lus () {// Hoofdlus. SER1.schrijven (80); // Vertelt de servo om op 80 graden te positioneren (naar voren gericht). vertraging (100); // Vertraging voor 0.1s. Afstand =Zoeken (); // De afstand meten in CM. if (Afstand <30) { // Indien obstakel gevonden in 30cm. digitalWrite (BuzzPIN, HOOG); // BuzzPIN-uitgang als 5V (Logisch hoog niveau). digitalWrite (LEDBPIN, LAAG); // LEDBPIN-uitgang als 0V (Logisch laag niveau). digitalWrite (LEDGPIN, LAAG); // LEDGPIN-uitgang als 0V (Logisch laag niveau). digitalWrite (LEDRPIN, HOOG); // LEDRPIN-uitgang als 5V (Logisch hoog niveau). M1.setSpeed (100); // Vertragen. M2.setSpeed (100); // Vertragen. ChangePath (); // Als vooruit is geblokkeerd Verander van richting. } else if ((Afstand>=30) &&(Afstand <60)) { // Als een obstakel wordt gevonden tussen 30 cm en 60 cm. digitalWrite (BuzzPIN, LAAG); // BuzzPIN-uitgang als 0V (Logisch laag niveau). digitalWrite (LEDBPIN, HOOG); // LEDBPIN-uitgang als 5V (Logisch hoog niveau). digitalWrite (LEDGPIN, LAAG); // LEDGPIN-uitgang als 0V (Logisch laag niveau). digitalWrite (LEDRPIN, LAAG); // LEDRPIN-uitgang als 0V (Logisch laag niveau). M1.setSpeed (150); // Snelheid iets verhoogd. M2.setSpeed (150); // Snelheid iets verhoogd. Vooruit (); // Robot beweegt naar voorwaartse richting. } else if ((Afstand>=60) &&(Afstand <90)) { // Als een obstakel wordt gevonden tussen 60 cm en 90 cm. digitalWrite (BuzzPIN, LAAG); // BuzzPIN-uitgang als 0V (Logisch laag niveau). digitalWrite (LEDBPIN, LAAG); // LEDBPIN-uitgang als 0V (Logisch laag niveau). digitalWrite (LEDGPIN, HOOG); // LEDGPIN-uitgang als 5V (Logisch hoog niveau). digitalWrite (LEDRPIN, LAAG); // LEDRPIN-uitgang als 0V (Logisch laag niveau). M1.setSpeed (200); // Versnellen. M2.setSpeed (200); // Versnellen. Vooruit (); // Robot beweegt naar voorwaartse richting. } else { // Als het obstakel niet kan worden gevonden in 90 cm. digitalWrite (BuzzPIN, LAAG); // BuzzPIN-uitgang als 0V (Logisch laag niveau). digitalWrite (LEDBPIN, HOOG); // LEDBPIN-uitgang als 5V (Logisch hoog niveau). digitalWrite (LEDGPIN, HOOG); // LEDGPIN-uitgang als 5V (Logisch hoog niveau). digitalWrite (LEDRPIN, HOOG); // LEDRPIN-uitgang als 5V (Logisch hoog niveau). M1.setSnelheid (250); // Snelheidsverhoging volledig. M2.setSnelheid (250); // Snelheidsverhoging volledig. Vooruit (); // Robot beweegt naar voorwaartse richting. }}void ChangePath () { // Path Change-lus. Stoppen (); // Robotstop. Achteruit (); // Robot loopt achteruit. Stoppen (); // Robotstop. SER1.schrijven (12); // Controleer de afstand naar rechts. vertraging (500); // Vertraging voor 0,5 s. RightDistance =Zoeken (); // Stel de juiste afstand in. vertraging (500); // Vertraging voor 0,5 s. SER1.schrijven (160); // Controleer de afstand naar links. vertraging (1000); // Vertraging voor 1s. LeftDistance =Zoeken (); // Stel de linkerafstand in. vertraging (500); // Vertraging voor 0,5 s. SER1.schrijven (80); // Keer terug naar het midden. vertraging (500); // Vertraging voor 0,5 s. VergelijkAfstand (); // Vind de langste afstand.}void CompareDistance () { // Distance Compare loop. if (RightDistance> LeftDistance) { // Als rechts minder wordt belemmerd. Rechtsaf (); // Robot Draai in de juiste richting. } else if (LeftDistance> RightDistance) { // If Left is minder gehinderd. Sla linksaf (); // Robot Draai naar links. } else { // Als beide even belemmerd zijn. Keer om (); // Robot omdraaien. }}void Forward () { // Forward loop. M1.run (VOORUIT); // Draai DCMotor #1 naar Vooruit. M2.run (VOORUIT); // Draai DCMotor #1 naar Forward.}void Backward () { // Backward loop. M1.run (ACHTERUIT); // Draai DCMotor #1 naar Achteruit. M2.run (ACHTERUIT); // Draai DCMotor #2 naar Achteruit. vertraging (500); // Vertraging voor 1s.}void TurnRight () { // Right Turn-lus. M1.run (ACHTERUIT); // Draai DCMotor #1 naar Achteruit. M2.run (VOORUIT); // Draai DCMotor #2 naar Vooruit. M1.setSpeed (100+DCMROFF); // Kalibreer de snelheid van DCMotor #1. vertraging (300); // Vertraging voor 0,7s.}void TurnLeft () { // Left Turn-lus. M1.run (VOORUIT); // Draai DCMotor #1 naar Vooruit. M2.run (ACHTERUIT); // Draai DCMotor #2 naar Achteruit. M2.setSpeed (100+DCMROFF); // Kalibreer de snelheid van DCMotor #2. vertraging (300); // Vertraging voor 0,7s.}void TurnAround () { // Trun Around-lus. M1.run (VOORUIT); // Draai DCMotor #1 naar Vooruit. M2.run (ACHTERUIT); // Draai DCMotor #2 naar Achteruit. M2.setSpeed (100+DCMROFF); // Kalibreer de snelheid van DCMotor #2. vertraging (700); // Vertraging voor 2.1s.}void Stop () {// Stop loop. M1.run (VRIJGAVE); // Laat DCMotor #1 los. M2.run (RELEASE); // Laat gelijkstroommotor #2 los. vertraging (100); // Vertraging voor 0.1s.}
Aangepaste onderdelen en behuizingen
Chassis
Het robotchassis, voor het dienovereenkomstig instellen van deze autonome machine.Schema's
Het schakelschema, voor het overeenkomstig instellen van deze autonome machine.Productieproces