


rDUINOScope
Componenten en benodigdheden
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
| × | 2 | ||||
| × | 1 | ||||
| × | 2 | ||||
 |
| × | 10 | |||
 |
| × | 1 | |||
| × | 1 |
Over dit project


Beschrijving
's Werelds eerste stand-alone op Arduino gebaseerde telescoopbesturing Goto.
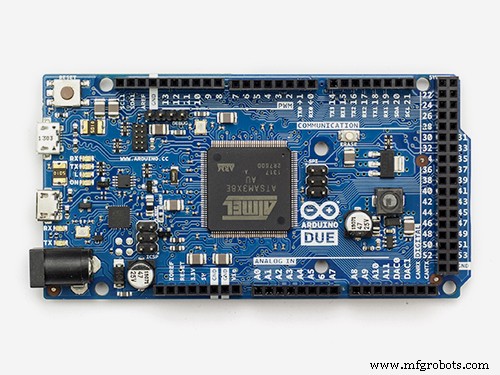
Alle beschikbare open source telescoopbesturingen gebruiken ofwel Raspberry Pi, die veel stroom verbruikt, of gebruiken Arduino als uitbreiding op een computer, smartphone of tablet. rDUINOScope is het eerste op Arduino gebaseerde, stand-alone apparaat waarmee amateurastronomen kunnen genieten van de nachtelijke hemel.
Het oorspronkelijke idee was om een goedkoop en eenvoudig te bouwen alternatief te creëren voor commercieel verkrijgbare GOTO-producten zoals die van SkyWatcher, Orion, Vixen en anderen. Dus de hardware-architectuur is gebouwd op een Arduino DUE-bord en goedkope sensoren die op de markt verkrijgbaar zijn. Instructies voor hoe te bouwen en gebruikershandleiding zijn gemaakt op de projectwebsite. In het hart van het systeem bevindt zich een Arduino DUE-bord, geladen met software die voortdurend wordt ontwikkeld om functionaliteit toe te voegen.
rDUINOScoop met Stellarium:
Details
rDUINOScope is een open source, Arduino Due-based Telescope Control System (GOTO). Ontworpen als een stand-alone systeem, heeft rDUINOScope geen pc, tablet of mobiele telefoon of internetverbinding nodig om te werken en verbluffende uitzichten te leveren!
In principe heeft het een database met DE BESTE 250 stellaire objecten (Messier en Hidden Treasures Catalogues) en 200 sterren , berekent hun positie aan de hemel en richt de telescoop. Geïmplementeerde uitlijningsprocedures zorgen voor een "altijd in het oculair"-ervaring wanneer naar geselecteerde objecten wordt gezwenkt en zodra het object zich in het oculair bevindt, blijft het systeem het volgen.
Als u echter uw elektronische apparaten wilt gebruiken, maakt #rDUINOScope gebruik van Bluetooth-communicatie (draadloze installatie) om verbinding te maken met alle elektronische apparaten en opdrachten te accepteren op basis van het MEADE LX200-communicatieprotocol.
Het systeem werkt met alle soorten stappenmotoren en kan worden gemonteerd op zowel doe-het-zelf-montages als in de handel verkrijgbare producten zoals SkyWatcher, MEADE, Orion, Vixen en etc.
Functionaliteit:
Wat zit er in de rDUINO SCOPE?
rDUINOScoop Github
Bouwinstructies
STAP 1 Voorbereiding
Voordat we beginnen, is het belangrijk dat u begrijpt hoe de software werkt om wijzigingen aan te kunnen brengen en voor u aan te passen. Dit is tenslotte een van de belangrijkste troeven van dit project!
Om dit deel te begrijpen moet je de code downloaden van de projectbestanden, samen met de "bibliotheken"-bestanden ... of gewoon het hele pakket downloaden van: http://rduinoscope.co.nf/downloads.php . Alle rijnummers waarnaar wordt verwezen, zijn volgens de code van V2.1. Boiana EQ
U moet weten hoe de Arduino-code werkt. Gewoonlijk heeft het Arduino-programma 2 secties:SETUP(); en LUS(); SETUP() wordt aan het begin van het programma uitgevoerd en gebruikt in feite het systeem; LOOP() is een constante lusfunctie die meerdere keren per seconde wordt geactiveerd. Dus om er zeker van te zijn dat we schermen hebben, aanraakinvoer enz. en dat het scherm niet flikkert vanwege de LOOP() moeten we een mechanisme uitvinden om Arduino te laten weten wat de gebruiker verwacht dat het doet. Dus in de LOOP()-sectie zie je een heel klein deel van de code dat alleen zegt "Overweeg aanraking.. of Overweeg tijd ..." en etc. De rest van de activiteiten vinden plaats binnen die functies die ons in staat stellen om de stroom van het programma zodat de schermen niet meerdere keren per seconde worden ververst.
Berekeningen :Ik heb wat informatie gebruikt die op internet is gevonden over het berekenen van de positie van stellaire objecten. De meeste informatie heb ik verzameld via de volgende link:http://www.stargazing.net/kepler/altaz.html - Beschrijft de benodigde formules en benadering om de uurhoek (HA) te berekenen, locatie, huidige tijd en stellair object RA te kennen en DEC.
Nadat ik de code heb gemaakt om HA /row 678 te berekenen:void calculatorLST_HA() / , Ik heb deze pagina gebruikt om te controleren of het goed werkt:http://www.jgiesen.de/astro/astroJS/siderealClock/ , en in een later stadium, toen ik de DB met Messier Objects toevoegde, gebruikte ik Stellarium (http:// www.stellarium.org/) aanvraag voor dezelfde controles.
Het belangrijkste probleem dat ik vond, waren niet de formules zelf, maar de manier waarop Arduino omgaat met variabele typen en met name de precisie van de berekeningen.
Als we nu de HA en DEC hebben berekend voor een bepaald object, willen we de telescoop naar de telescoop richten en om dat te doen, moeten we op de een of andere manier weten hoeveel motoren precies moeten draaien. Om hierin te slagen, moet ik weten wat de verhouding tussen worm en overbrenging is - d.w.z. hoeveel omwentelingen de worm moet maken om de versnelling 360° te laten maken. Ik heb Vixen Super Polaris en snel zoeken op internet onthulde dat het 144 tandtandwielen gebruikt voor zowel RA- als DEC-assen. Ik heb een eenvoudig Excel-bestand gemaakt (*.XLS - http://rduinoscope.co.nf/downloads/Gears_Stepper_Calculation.xlsx) om te berekenen hoeveel de motoren moeten draaien nadat ik HA en DEC heb berekend, en ook hoe vaak " motoren om de aardrotatie te compenseren.
Gears_Stepper_Calculation.xlsxHetzelfde wiskundige model dat ik in de XLS heb gebruikt, is ook geïmplementeerd in de code, dus u hoeft alleen maar de waarden voor uw mount in het begin van de code te vervangen (rijen 34 tot 37).
// HIER GAAT DE informatie over de montage, versnellingen en aandrijving.// ... gebruikt om de verhouding HourAngle tot microSteps te berekenen// UPDATE DIT DEEL volgens uw SET-UP// ------ ---------------------------------------// NB:RA en DEC gebruiken dezelfde versnelling verhouding (144 tanden in mijn geval)!//--------------------------------------- -------int WORM =144;int REDUCTOR =4; // 1:4 versnellingsreductie in DRIVE_STP =200; // Stepper drive hebben 200 stappen per omwenteling MICROSteps =16; // Ik gebruik 1/16 microsteps-modus om siderisch te rijden - bepaalt ook de LAAGSTE snelheid. Zodra we de verhoudingen hebben berekend, weet de code hoeveel de motoren moeten worden gedraaid om de telescoop op de overeenkomstige coördinaten te richten en ook wat de kloksnelheid is, zodat de montering het object kan volgen. Functies die voor het bovenstaande zorgen, beginnen bij rij 906 en rij 917:
void Sidereal_rate(){}void cosiderSlewTo(){} Overwegingen :Weet je, dit is geen gebruiksklaar product. Het stelt je in staat om het aan je behoeften aan te passen en is dus erg flexibel, maar met de flexibiliteit zijn er enkele nadelen. Ik heb dit gedeelte 'Overwegingen' toegevoegd om ervoor te zorgen dat ze niet van je takenlijst verdwijnen.
- Montagemotoren is een eenvoudige taak, die echter van invloed is op de manier waarop uw berekeningen zouden moeten werken. In mijn scenario hebben Vixen Super Polaris hun originele tandwielen aan de rechterkant van de wormas geplaatst. Ik vond die assen echter kort om de tandwielen te vervangen door poelies en verplaatste dus de poelies aan de andere kant van de as (links). Dit zorgde ervoor dat de motor eigenlijk achteruit moet draaien om de telescooppositie te vergroten en dus moest ik de originele code die ik heb gemaakt herzien. Je moet zeker de richtingen waarop je motoren draaien, herzien, anders krijg je een verkeerd tellen van de stappen, dus een verkeerde positie. Laat me je laten zien wat ik bedoel:zie rij 1028 waar ik de motor stuur naar STP_BACK, maar op rij 1031 verhoog ik de teller +=... (Alle rijnummers waarnaar wordt verwezen zijn volgens de code van V2.1. Boiana EQ ).
if (SLEW_RA_microsteps> RA_microSteps){ digitalWrite(RA_DIR,STP_BACK); digitalWrite(RA_STP,HOOG); digitalWrite (RA_STP, LAAG); RA_microSteps +=RA_mode_steps;}anders{ digitalWrite(RA_DIR,STP_FWD); digitalWrite(RA_STP,HOOG); digitalWrite (RA_STP, LAAG); RA_microSteps -=RA_mode_steps;} ACTIE: Herzie de volgende delen van de code:void consider_Manual_Moveint xP, int yP ), void cosiderSlewTo() en void Sidereal_rate().
- Noordelijke VS. Zuidelijk Hemispheres:De code keert ook de VOORWAARTSE beweging om, afhankelijk van de hemisfeer waar u zich bevindt. Dit gebeurt in een deel van de code, waar ik de Touch-ingangen verzorg. Mogelijk moet u de codesectie herzien.
- Gearing op DEC- en RA-as :Mijn code werkt in de veronderstelling dat zowel de DEC- als de RA-as een tandwiel met 144 tanden gebruiken. Dit is het geval voor Vixen Super Polaris. Als u een andere configuratie heeft, moet u mogelijk enkele delen van de code herzien. Als je problemen hebt om die delen van de code te identificeren, stuur me dan een bericht en ik zal proberen je te helpen!
Plan uw activiteiten: Nu hebben we een punt bereikt waarop we onze activiteiten moeten plannen om het rDUINO Scope GoTo-systeem daadwerkelijk te bouwen. Ruwe schatting is dat u het systeem in 2-3 dagen zou moeten kunnen voltooien, aangezien u alles hebt wat nodig is (HW, gereedschappen en materialen). Het kostte me zo'n 4-5 maanden om het te voltooien, aangezien ik alleen 's nachts kon werken (niet elke nacht), en ik ook veel onderzoek moest doen. Alles samenvoegen kostte me:
- 1 dag om het Shield-bord te bouwen en het systeem op te fleuren
- 1 dag om alles in een doos te verpakken
- 1 dag om motoren en katrollen aan de houder te bevestigen
STAP 2 Materialen
Nu we weten hoe het programma in wezen werkt, moet u uw inkoop plannen en de benodigde materialen verkrijgen.
Bill of Materials :De meeste materialen die ik heb gebruikt, worden op internet gekocht bij Chinese leveranciers. Er waren er echter maar een paar die ik besloot om lokaal te kopen, vooral omdat ze als goed werden beschouwd en ik vertragingen wilde voorkomen:GPS, Bluetooth en Joystick. Het kostte me ongeveer $ 190 USD om dit allemaal te krijgen, dus het is echt een lage prijs in vergelijking met hoe duur het is om een dergelijk systeem van fabrikanten te kopen. U kunt een lijst met materialen vinden, samen met hun prijzen en waar u ze kunt kopen op de projectwebsite:http://rduinoscope.co.nf/rDUINO_step2.html, maar de lijst is ook beschikbaar op deze website in de sectie "COMPONENTEN" .
Als je ze goedkoper kunt vinden of sneller kunt leveren, raad ik je ten zeerste aan dat te doen.
Bovendien heeft u, afhankelijk van uw ontwerp, mogelijk 40-pins nodig. kabel met connectoren voor de TFT, enkele plastic bouten om de joystick te bevestigen, USB-kabel om ervoor te zorgen dat de Arduino Due nog steeds programmeerbaar is wanneer deze in de doos zit, ventilator en andere.
Als je die niet thuis hebt (zoals ik niet), moet je ook wat soldeermaterialen, soldeer, tangen, digitale multimeter en andere kopen.
Software die je nodig hebt :Een belangrijk onderdeel van het bouwen van uw rDUINOScope is het downloaden en installeren van de Arduino IDE en alle gerelateerde software (stuurprogramma's, borddefinities en bibliotheken). Volg de onderstaande lijst om te installeren die nodig is op uw computer:
- Ga naar de Arduino-website en download de IDE:https://www.arduino.cc/en/Main/Software. Installeer de software - Nadat de software is geïnstalleerd, worden ook de benodigde stuurprogramma's geïnstalleerd, zodat uw computer het Arduino-bord herkent wanneer deze is aangesloten.
- Voer de Arduino IDE uit en ga naar:Tools -> Board -> Boardbeheer , eenmaal daar Download en installeer Arduino Due boarddefinitie "Arduino SAM Boards (32-bit ARM Cortex-M3)";
- Download het bibliothekenpakket dat ik als onderdeel van het programma heb gebruikt en kopieer en plak ze in de map 'bibliotheken' van je Arduino IDE-installatie. (OPMERKING:"bibliotheken" is een map op uw computer, maar het is ook een map binnen het COMPLETE PACK dat beschikbaar is op de projectwebsite: http://rduinoscope.co.nf/downloads.php , dus je moet het pakket downloaden, de extensie hernoemen naar .ZIP, het openen en de inhoud van de map "_libraries" kopiëren van de ZIP naar de map "libraries" op je computer.) /em>
- Start de IDE opnieuw en open het hoofdprogrammabestand - "_02_Boiana_EQ.ino". Je zult merken dat er nog 4 bestanden zullen openen in aparte TAB's. Dit zijn ondersteunende bestanden die voor verschillende onderdelen van de software zorgen.
Je zou nu in staat moeten zijn om de code te compileren en op het Arduino Due-bord te laden nadat je Arduino op je computer hebt aangesloten.
Opmerking: Als je niet weet hoe de Arduino IDE werkt en wat er moet gebeuren om Arduino te programmeren, raadpleeg dan de website en tutorials:https://www.arduino.cc/en/Tutorial/HomePage
STAP 3 Monteren
Ga voor meer gedetailleerde instructies naar de projectwebsite:http://rduinoscope.co.nf/rDUINO_step3.html
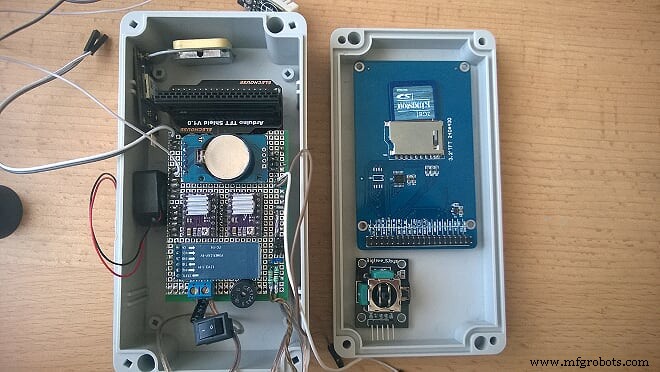
Dit is het moment om het Shield-bord te maken. Een Shield board is een board met pinouts die je bovenop het ArduinoDUE board stapelt. Sommige componenten moeten op dat bord zitten en sommige zijn beter op de behuizing geplaatst. Mijn verdeling gaat als volgt:
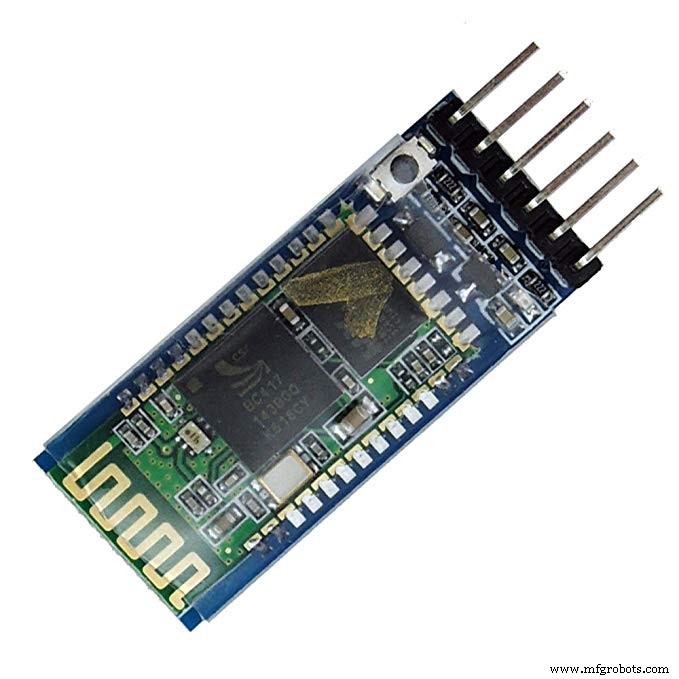
- Shield Board-houder:beide DRV8825-drives, RTC3231-klok, Bluetooth-module HC-05, Piezo-spaker, Connector voor 12V en pinouts voor de overige componenten;
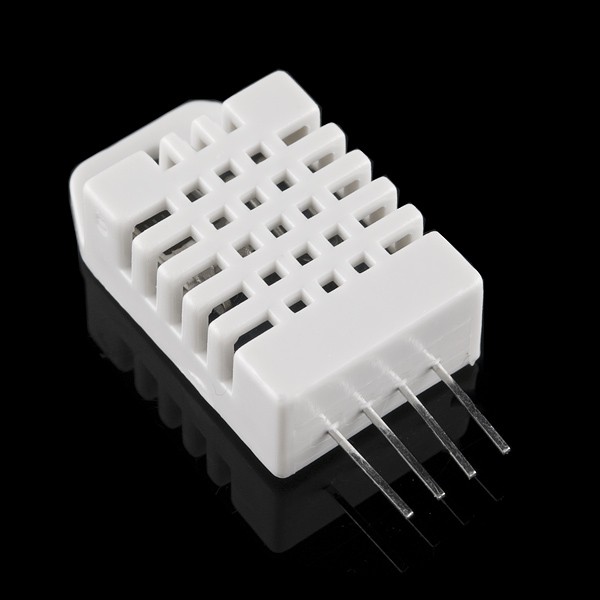
- Maand op de dooscomponenten zijn:GPS-module NEO 6M - RX zodat de antenne altijd naar de lucht kan wijzen, DHT22-temperatuursensor die buiten de doos door een gat wordt gestoken, PS2-joystick, het TFT-scherm en alle schakelaars (AAN /OFF-schakelaar en dag-/nachtmodusschakelaar). Daarnaast heb ik gaten geboord voor de Motor Drives-connectoren, de 12V-voedingsconnector en een USB-kabelpoort die naar de ArduinoDUE Native-poort gaat om software-updates mogelijk te maken zonder de doos te openen.
Hoe componenten op het ARDUINO DUE-bord aan te sluiten:
Component .... Hardware-pin .... Arduino-pin
GPS
- GPS NEO 6M .... RX .... 16
- GPS NEO 6M .... TX .... 17
RTC
- RTC DS3231 .... SDA .... A4
- RTC DS3231 .... SCL .... A5
Bluetooth
- BT HC-05 .... TXD .... 14
- BT HC-05 .... RXD .... 15
DHT
- DHT22 .... uit .... 3
Luidspreker
- Piëzo-luidspreker .... 2
PS2
- PS2-joystick .... VRx .... A1
- PS2-joystick .... VRy .... A0
Declinatie DRV8825
- DEC DRV8825 .... STAP .... 6
- DEC DRV8825 .... DIR .... 7
- DEC DRV8825 .... M0 .... 10
- DEC DRV8825 .... M1 .... 9
- DEC DRV8825 .... M2 .... 8
- DEC DRV8825 .... RESET DEC DRV8825 .... SLAAP
Rechte klim DRV8825
- RA DRV8825 .... STAP .... 4
- RA DRV8825 .... DIR .... 5
- 3V
- RA DRV8825 .... M0 .... 11
- RA DRV8825 .... M1 .... 13
- RA DRV8825 .... M2 .... 12
- RA DRV8825 .... RESET RA DRV8825 .... SLAAP
TFT-scherm
- gebruik met TFT Shield .... pinnen (22-53) + SPI
- Dag/Nacht .... Modusschakelaar .... A3
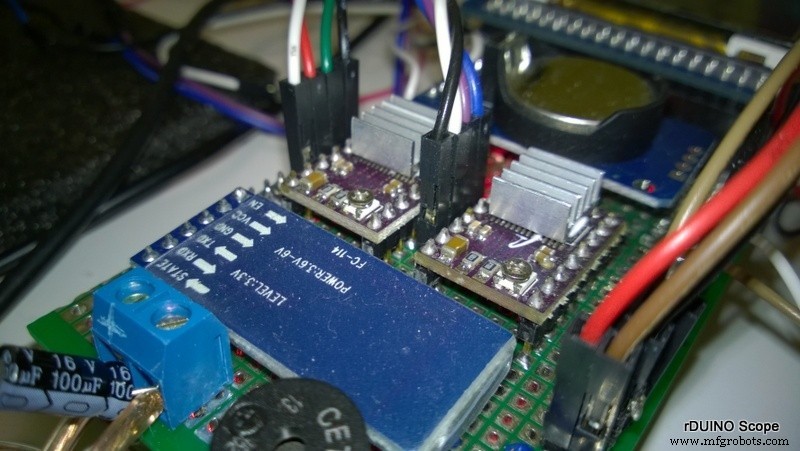
Juist... Nu zijn we klaar om het schildbord te monteren. Koop een prototype-printplaat en beoordeel hoe deze moet worden gesneden, zodat deze alle componenten kan bevatten om wat ruimte voor bedrading te hebben en de pinouts zodanig te laten solderen dat deze op Arduino kunnen worden gestapeld. Houd er rekening mee dat je alle pinnen die door Arduino worden gebruikt, moet solderen en ze ofwel op de componenten op het Shield-bord of op een connector op dit schildbord moet aansluiten, zodat componenten die op de doos zelf zijn geplaatst ook kunnen worden aangesloten.
Ik voeg hieronder enkele foto's van het proces toe:
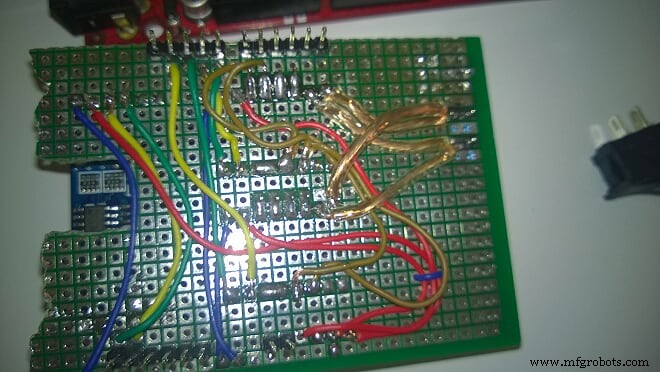

Toen dat klaar was, heb ik het bord aangesloten en het schild getest! Het werkte niet! :( Ik heb de bedrading gecontroleerd en het bleek dat ik een brug had gemaakt tussen 2 verbindingen en deze moest repareren. Houd er rekening mee dat ik vanaf dit moment elk soldeerwerk op problemen begon te controleren, omdat ik echt geluk had dat ik mijn Arduino of iets anders niet verbrandde met de verkeerde bedrading. NB:Controleer alle verbindingen! Zorg ervoor dat u het volgende bedradingsschema voor de DRV8825 en motoraandrijvingen volgt, aangezien dit belangrijk is.
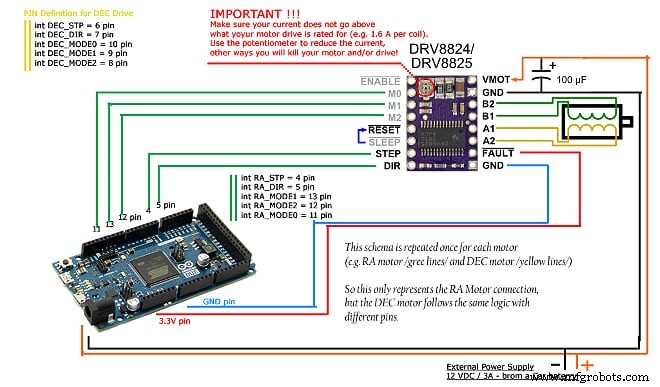
Zorg ervoor dat u een geschikte voedingsadapter (12V, 1.6A) gebruikt en sluit de motoraandrijvingen aan voordat de stroom wordt ingeschakeld! NB:Sluit nooit motoraandrijvingen aan wanneer de DRV8825 onder belasting staat, aangezien dit de stuurprogramma's kan verbranden!
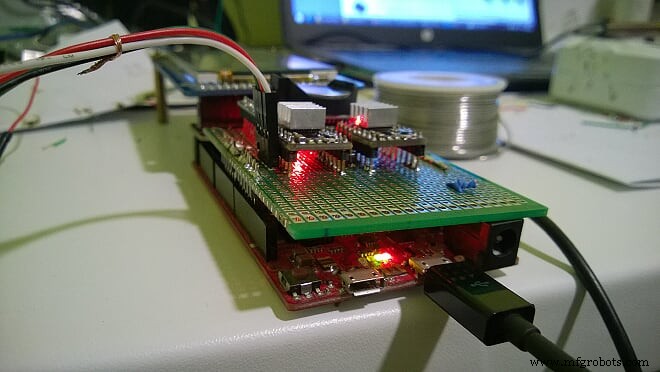
Nu alle componenten op hun plaats zijn gesoldeerd, raad ik je aan ook de motoraandrijvingen aan te sluiten, de software op het Arduino-bord te laden en de hele installatie te testen. Het zou op dit moment zonder problemen moeten werken.
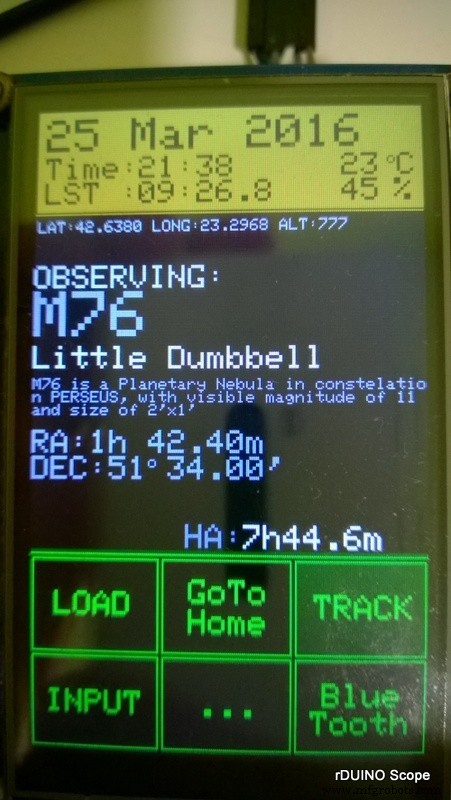
Je zou nu in staat moeten zijn om met de software te spelen en de gebruikersinterface te leren kennen. Om te helpen met de interface heb ik een GEBRUIKERSGIDS-pagina gemaakt op de website van het project:http://rduinoscope.co.nf/guide.html
Je setup zou er ongeveer zo uit moeten zien:

STAP 4 Doe het samen
Zodra het schildbord klaar is, pak je de doos en begin je met het neerleggen van alle resterende componenten en plan je waar je gaten moet boren en welke vorm en maat. De beste manier om gaten te snijden is met een klein zakmes (althans voor mij). Het maakt eigenlijk niet uit of het een rond of een vierkant gat is. Je kunt het gemakkelijk snijden met een klein scherp mes.
De enige uitzondering is voor het scherm waar je echt een lang, egaal en vierkant gat nodig hebt. Ik vroeg om hulp en mijn vader deed het op zijn snijmachines.
Zodra u tevreden bent met de lay-out en het als uitvoerbaar beschouwt, begint u met het snijden van de gaten. Het is een lang proces en zorgt voor wat rommel, maar het zou niet meer dan 2-3 uur moeten duren. Soms gebruikte ik boren als ik cirkelvormige gaten moest maken, bijvoorbeeld:12V-voedingsconnector, RA- en DEC-motorconnectoren.
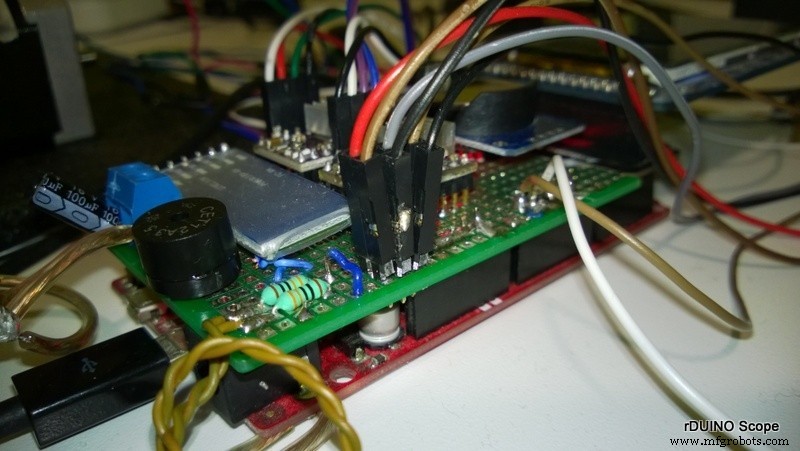
Bereid uw hetelijmpistool voor en begin met het hete lijmen van componenten aan de doos zoals hieronder getoond:




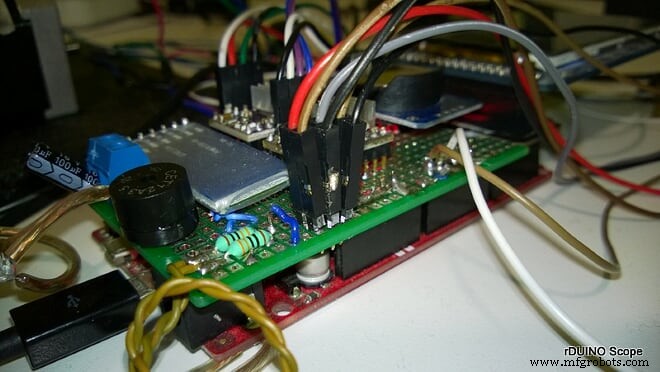
Nu is alles aangesloten en in een doos geplaatst, behalve het onderdeel op de voorkant van de doos. Ik heb besloten om daar het TFT-scherm, de PS2-joystick en de dag-/nachtmodusschakelaar te plaatsen. Toen ik bij het TFT-scherm kwam, maakte ik een eenvoudige lintkabelverbinding met mannelijke en vrouwelijke connectoren en haakte deze aan het scherm. Dit werkte echter niet! De reden is dat de pinnen gespiegeld zijn geworden en als zodanig kan het TFT-scherm niet meer werken. Dus besloot ik een aantal gecompliceerde 2D-naar-3D-conversies uit te werken en de connectoren uit te werken die ik had met de lintkabel om het probleem op te lossen
Lang verhaal, kort: Het is geen raketwetenschap, maar het heeft me wat moeilijke tijden bezorgd totdat ik een oplossing vond. Een lelijke oplossing, maar het werkte en het werkt nog steeds een jaar later. Hieronder kun je zien wat ik bedoel.
Wat je hier ziet is eigenlijk:
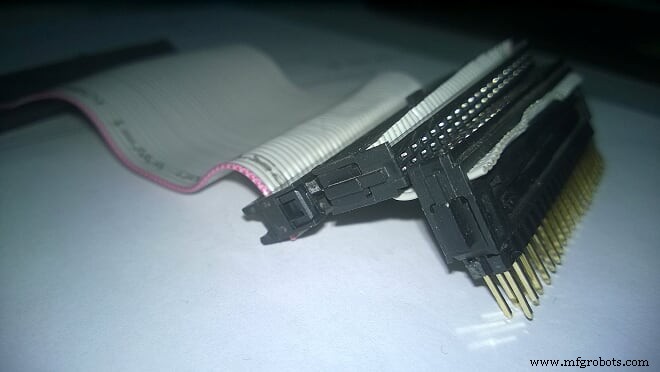

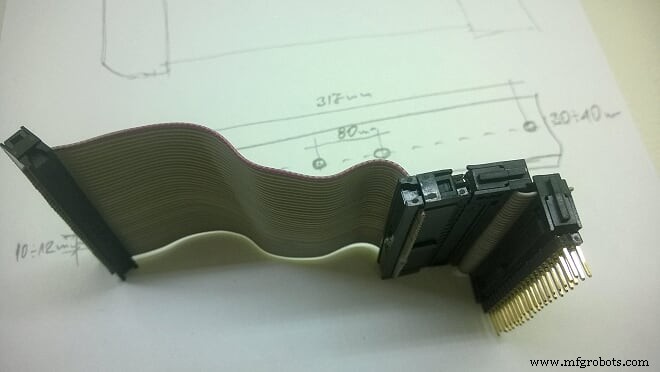
- Lintkabel
- 40-pins vrouwelijke connectoren
- pinnen om op een PCB te solderen, gesneden om een array te vormen (2 x 20 pinnen)
Het werkte als een tierelier en stelde me in staat om de doos te voltooien!






STAP 5 De Duitse Equatoriale Berg
Hoe graag ik ook met u wil delen hoe u de motoraandrijvingen op uw houder aansluit, ik kan het niet. De waarheid is dat elke fabrikant zijn eigen ontwerp maakt en als zodanig is er geen oplossing die voor iedereen werkt.
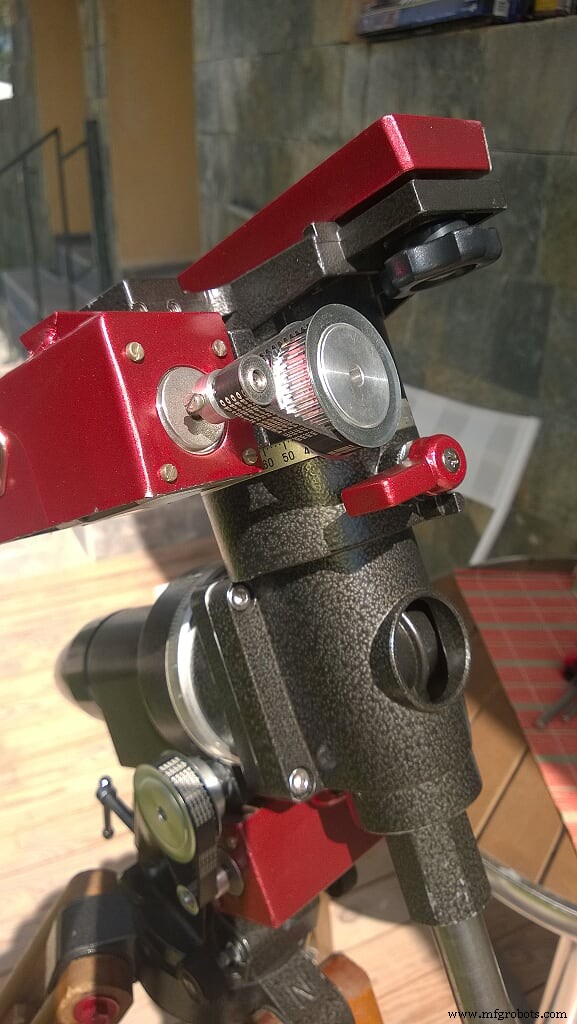
Ik gebruik Vixen Super Polaris uit de jaren 80 en de onderstaande methode werkt daarvoor. Ik moet je eraan herinneren dat de beslissingen die je nam in STAP 1 waar u de waarden in de code moest wijzigen, heeft nu invloed op ons werk. Hieronder zie je mijn opstelling van katrollen en riemen.
Ik heb 2 sets gekocht voor mijn setup. Ik wist alleen niet zeker hoe het zou werken en heb daarom een set met reductie 1:4 en een set met reductie 1:3 gekocht. De maat van de riem moet ook anders zijn omdat de reductie de afstand tussen beide poelies beïnvloedt. Ik geef toe dat je met een goede planning en ontwerp vooraf kunt beslissen hoe je te werk gaat en wat geld bespaart, maar ik had haast. Ik moest het laten werken!

Nadat ik de riemen, poelies en montage voor me had, besloot ik dat de beste aanpak voor mij zou zijn om 1:4 reductie te gebruiken omdat alles perfect op de steun leek te passen en ik begon aan het motorhuis te werken. Na een halve dag kon ik dit bedenken:
Ik heb de hele opstelling getest en moest enkele wijzigingen in de software aanbrengen (werk de variabelewaarden bij naar 4 op rij 35) zodat dit mijn definitieve ontwerpbeslissing vertegenwoordigt. Heb het opnieuw getest en alles werkte als een zonnetje.


Ik moest wachten op een goede sterrennacht om het goed te testen, maar totdat ik wachtte, realiseerde ik me dat er iets niet klopte!
Ik had het beste Telescope Control GOTO-systeem, veel beter dan wat ik met mijn hobbybudget kan kopen, maar het zag er niet goed uit. Er waren nog wat laatste details nodig, iets dat me later trots maakte op mijn rDUINOScope!
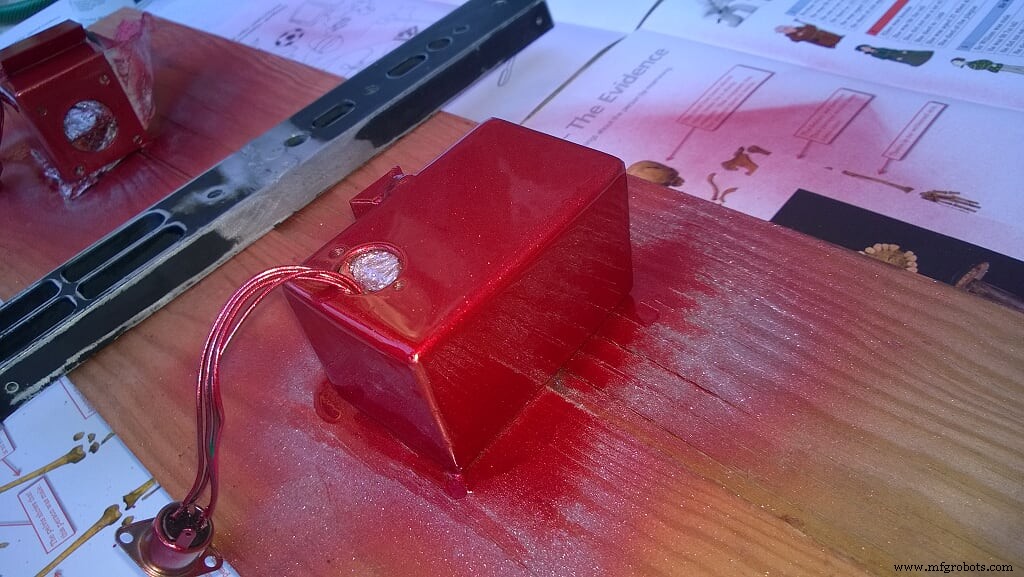
Eindelijk ziet mijn rDUINOScope Vixen SP Ferrari eruit zoals ik vind dat hij eruit moet zien!


Bestanden
_READ_ME.txt:Beschrijving van de definitieve versie v.2.1 Boiana EQ samen met enkele F.A.Q.
_READ_ME.txt_02_Boiana_EQ.ino:Hoofd Arduino-bestand
_02_Boiana_EQ.inographic_screens.ino:GRAPHICS FILE - gekoppeld aan het hoofdbestand
graphic_screens.inotouch_inputs.ino:TOUCH INPUTS FILE - gekoppeld aan het hoofdbestand
touch_inputs.inoBT.ino:BLUETOOTH-COMMUNNICATIE - gekoppeld aan het hoofdbestand
BT.inoregular_updates.ino:TIME UPDATES - gekoppeld aan het hoofdbestand
regular_updates.ino
Code
- Codefragment #1
- Codefragment #3
Codefragment #1Platte tekst
// HIER GAAT DE informatie over de montage, versnellingen en aandrijving.// ... gebruikt om de verhouding HourAngle tot microSteps te berekenen// UPDATE DIT DEEL volgens uw SET-UP// --------- ------------------------------------// NB:RA en DEC gebruiken dezelfde overbrengingsverhouding (144 tand in mijn geval)!//------------------------------------------ ----int WORM =144;int REDUCTOR =4; // 1:4 versnellingsreductie in DRIVE_STP =200; // Stepper drive hebben 200 stappen per omwenteling MICROSteps =16; // Ik gebruik 1/16 microsteps-modus om siderisch te rijden - bepaalt ook de LAAGSTE snelheid.
Codefragment #3C/C++
if (SLEW_RA_microsteps> RA_microSteps){ digitalWrite(RA_DIR,STP_BACK); digitalWrite(RA_STP,HOOG); digitalWrite (RA_STP, LAAG); RA_microSteps +=RA_mode_steps;}anders{ digitalWrite(RA_DIR,STP_FWD); digitalWrite(RA_STP,HOOG); digitalWrite (RA_STP, LAAG); RA_microSteps -=RA_mode_steps;} Github
https://github.com/dEskoG/rDUINOScopehttps://github.com/dEskoG/rDUINOScopeSchema's
Stappenmotoren en DRV8825 bedraden en aansluiten op Arduino DUE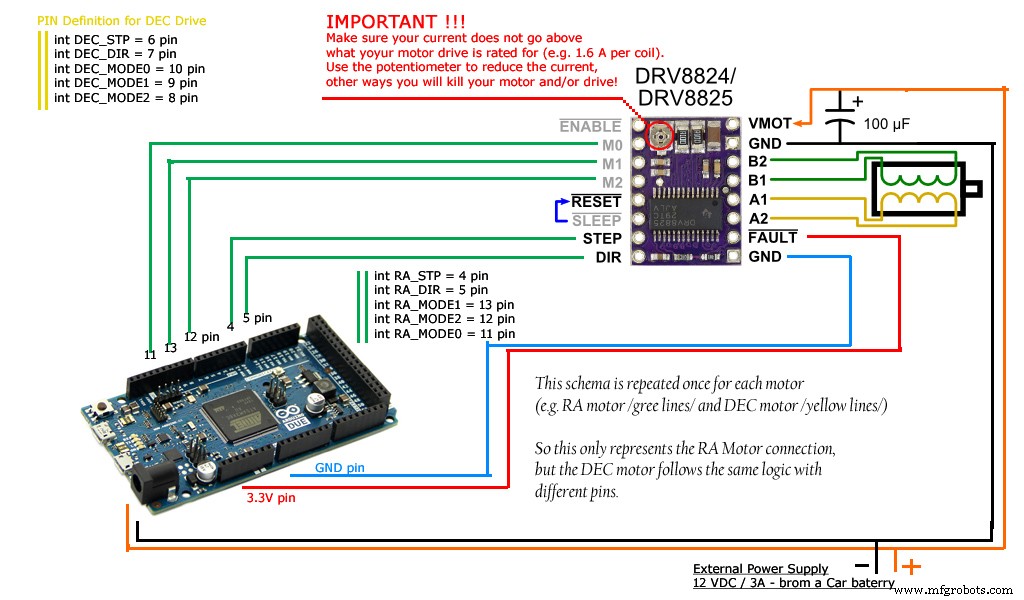 Hoe alle sensoren aan te sluiten en verbinding te maken met Arduino DUE
Hoe alle sensoren aan te sluiten en verbinding te maken met Arduino DUE 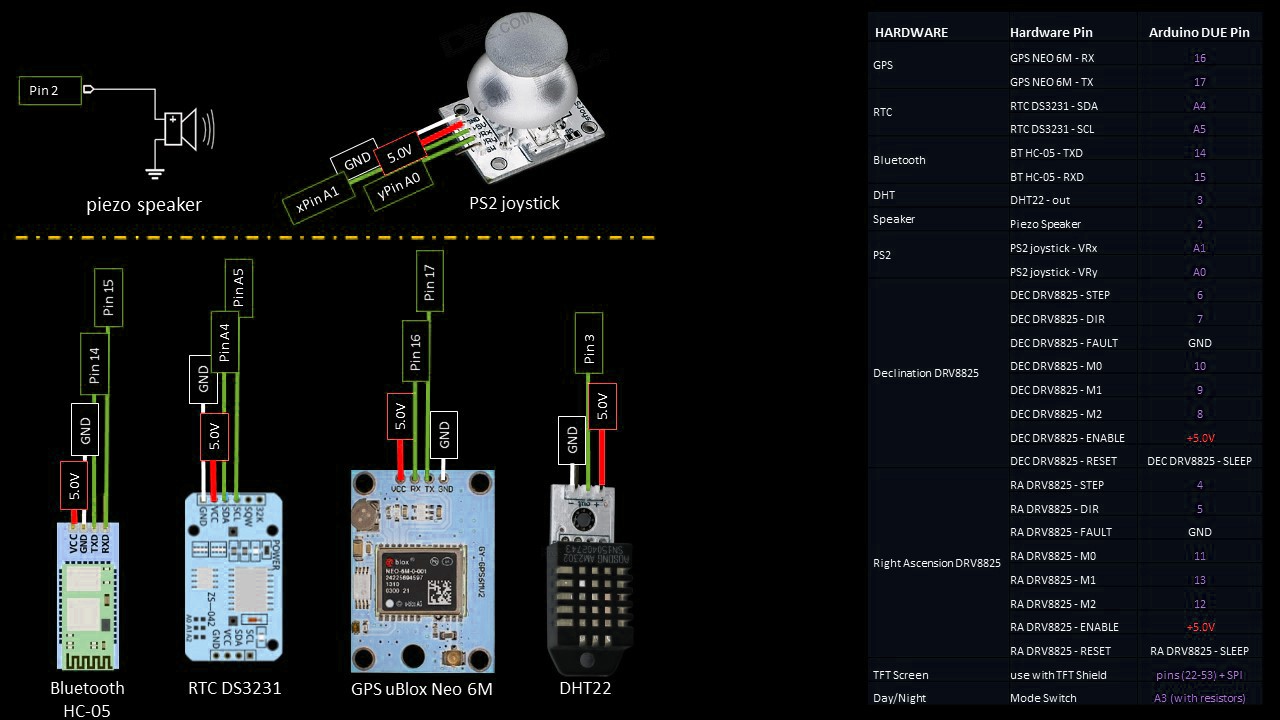
Productieproces