


Sliding Gate-automatisering
Componenten en benodigdheden
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Over dit project
Projectoverzicht
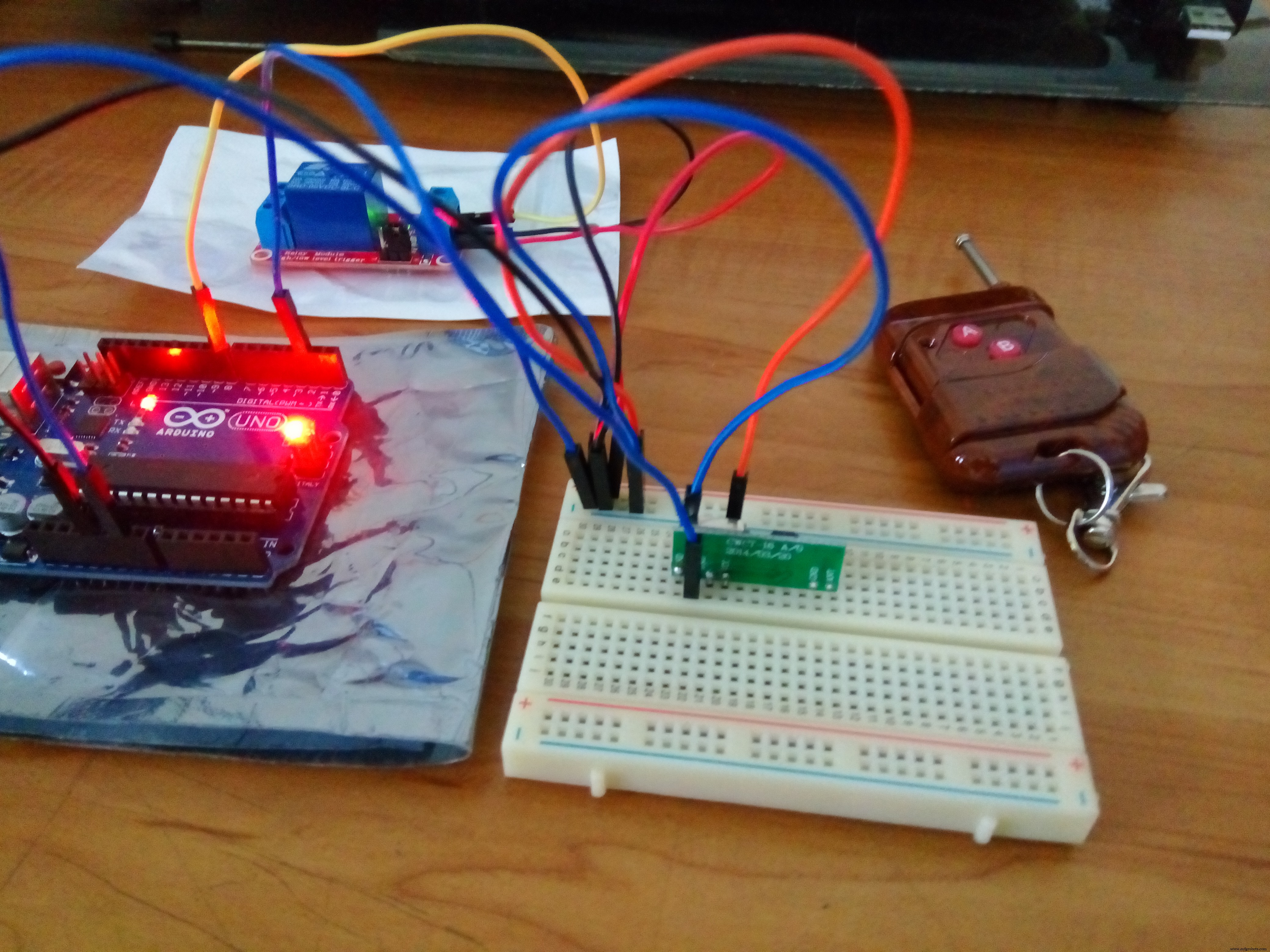
In dit project gebruik ik de kracht van Arduino om een circuit te maken om een schuifpoort van stroom te voorzien. Het belangrijkste doel van dit project is om een dode schuifpoort met een functionerende AC-motor te gebruiken en het systeem te automatiseren met behulp van een Arduino, een paar relais, een 433MHz-ontvanger, een 433MHz-zender en wat sluwe elektrische vaardigheden. Het systeem creëert een methode om de motor van de poort aan te drijven wanneer dat nodig is en om te beslissen of de poort moet worden geopend of gesloten.
De Arduino luistert constant naar een ingestelde reactie van de zender, in dit geval is het de afstandsbediening die wordt gebruikt om de poort te openen of te sluiten. De zender werkt op twee kanalen, waarbij elk kanaal een unieke ID heeft. Zodra deze ID is ontvangen door de 433MHz-ontvanger, stuurt deze een signaal naar de Arduino die de relais bestuurt om de motor van stroom te voorzien.
Methodologie
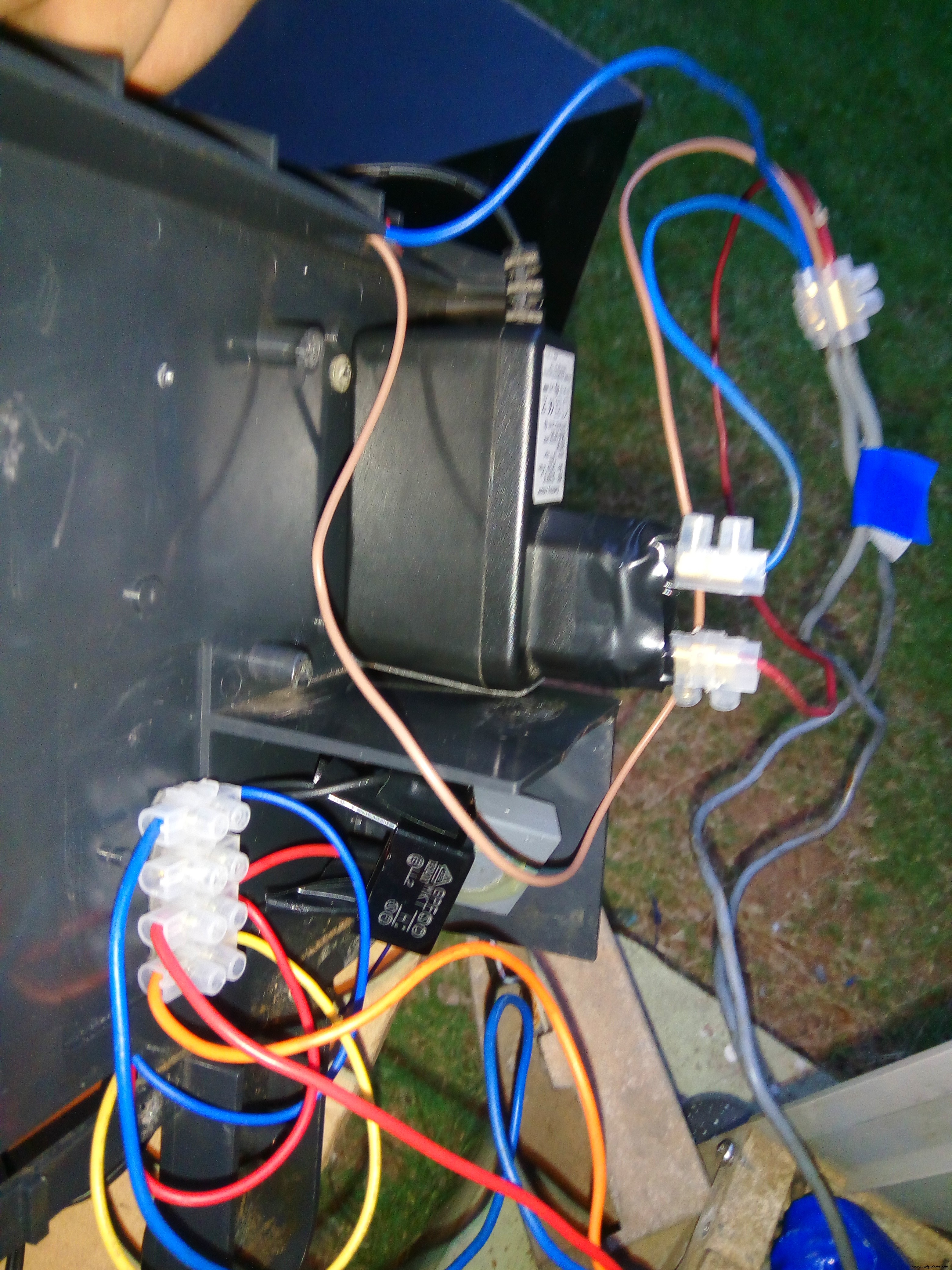
Stap 1:De motor aanzetten
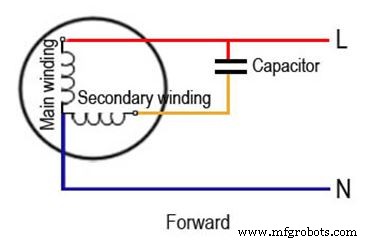
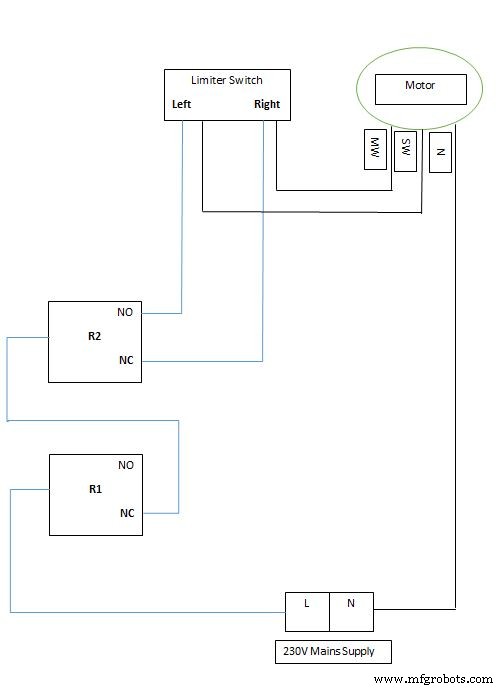
De configuratie voor het aandrijven van de motor wordt hieronder weergegeven. Om ervoor te zorgen dat de motor de poort in de voorwaartse (dichte) richting beweegt, moet de hoofdwikkeling worden aangesloten op de netvoeding.
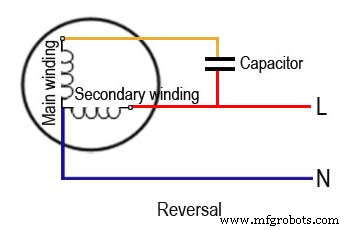
Om de motor in de tegenovergestelde (open) richting te laten bewegen, moet de secundaire wikkeling worden aangesloten op de netvoeding.
Het is noodzakelijk om te identificeren welke draad overeenkomt met welke wikkeling. Gewoonlijk zijn de draden niet gelabeld en dit kan met vallen en opstaan worden geïdentificeerd door de draad van wisselstroom te voorzien.
In mijn geval werkte ik met een 220~240VAC-motor. Ik kon de neutrale draad gemakkelijk identificeren omdat deze blauw van kleur was, een standaardkleur die wordt gebruikt om de neutrale aansluiting aan te geven.
Vervolgens verbond ik de Live-terminal met de rode draad, waardoor de motor in voorwaartse richting draaide. Dit gaf aan dat ik stroom heb geleverd aan Hoofdwikkeling van de Motor.
Opmerking: Zorg ervoor dat de startcondensator goed is aangesloten en werkt. Dit zorgt ervoor dat de motor voldoende startkoppel heeft.
Stap 2:De motor stoppen
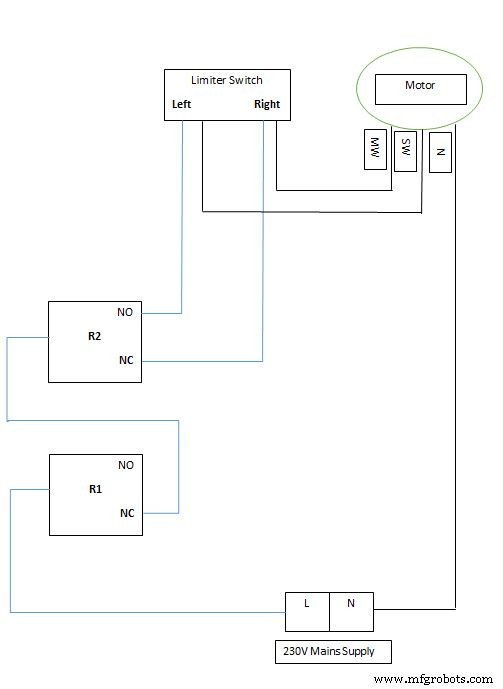
De netvoeding wordt aan de motor geleverd via een begrenzingsschakelaar. Zodra de poort het ene uiteinde bereikt, wordt de begrenzingsschakelaar geactiveerd die het circuit opent en stopt met het leveren van stroom aan de motor.
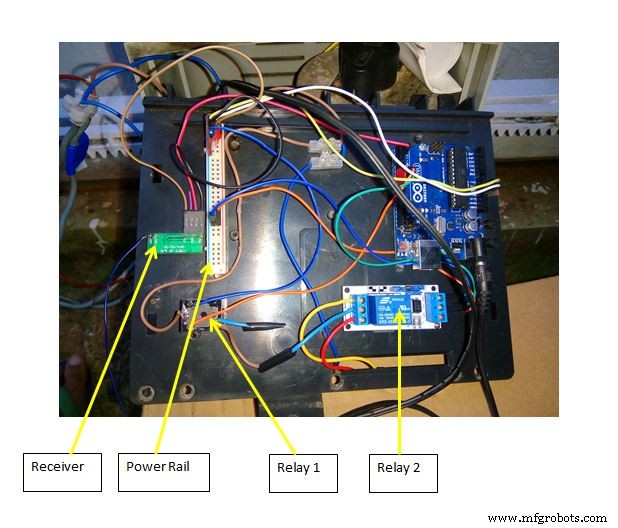
Stap 3:Relais gebruiken om de motor te besturen
Het relais heeft twee contactpunten; Normaal open en normaal gesloten.
Het normaal gesloten pad wordt gebruikt om de hoofdwikkeling van de motor van stroom te voorzien. Deze is gekozen om ervoor te zorgen dat wanneer het systeem wordt gereset of als er iets misgaat in het systeem, de motor ervoor zorgt dat de poort te allen tijde gesloten blijft.
Het normaal open pad wordt gebruikt om de secundaire wikkeling van de motor van stroom te voorzien. Het normaal open pad is gesloten wanneer de spoel in het relais wordt bekrachtigd. Dit kan worden gedaan door een 5V-signaal van de Arduino te sturen, aangezien de gebruikte relais onder 5V werken.
Door twee paden te gebruiken om de motor aan te drijven zorgt ervoor dat er niet gelijktijdig stroom wordt geleverd aan de hoofd- en secundaire wikkelingen van de motor.
Dit relais(R2 ) wordt bediend via pin 8 van de Arduino.
Een tweede relais(R1 ) wordt gebruikt om het circuit te onderbreken zodat de motor stopt als de Arduino het commando van de ontvanger ontvangt terwijl de poort in beweging is.
De Arduino controleert constant of de ontvanger een commando heeft ontvangen. Zodra een opdracht is gegeven, leidt de Arduino de stroom naar de motor om zodat deze de poort kan sluiten of openen.
Het belangrijkste doel van het tweede relais is om het systeem voldoende tijd te geven om het systeem om te leiden om de motor van stroom te voorzien zonder onmiddellijk de richting waarin de motor draait te veranderen. Zodra de omleiding is voltooid, wordt het relais uitgeschakeld en wordt de motor van stroom voorzien om in de tegenovergestelde richting te draaien.
Dit relais wordt bediend via pin 9 van de Arduino.
Doel van de tweede estafette
Als het systeem de poort halverwege sluit en het commando van de ontvanger ontvangt om de poort te openen, wordt het relais geactiveerd om de stroom naar de secundaire wikkeling om te leiden. Aangezien dit bijna onmiddellijk gebeurt, staat het relais onder constante druk van de sperspanning die door de motor wordt gegenereerd als gevolg van een plotselinge stroomuitval op de hoofdwikkeling. Bovendien, permanente beschadiging van de contacten van het relais indien continu belast.
Met behulp van een extra relais wordt de voeding naar de motor losgekoppeld en krijgt het systeem 10 seconden de tijd om de stroom naar de benodigde wikkelingen om te leiden. Dit vermindert de spanning op de contacten van het relais en verlengt hun levensduur.
Relais beschermingsmethode:
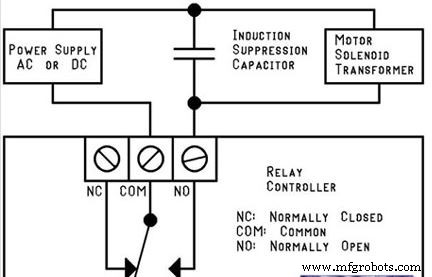
Onderdrukkingscondensatoren
Wanneer een gelijkstroommotor plotseling wordt gestopt, ontstaat er een negatieve stroomlus door de spoel van de motor, dit komt door de inductieve eigenschappen van een spoel. Dit kan echter worden geneutraliseerd door een terugkoppeldiode te installeren om een pad te verschaffen waardoor de negatieve stroom kan vloeien.
Wanneer een AC-motor plotseling wordt gestopt door een schakelaar, ontstaat er een hoge spanningsopbouw op de schakelcontacten.
Onderdrukkingscondensatoren worden gebruikt om te voorkomen dat de hoge spanning op de relaiscontacten wordt opgebouwd wanneer de motor wordt verteld om in de tegenovergestelde richting te werken. Dit beschermt de overige contacten.

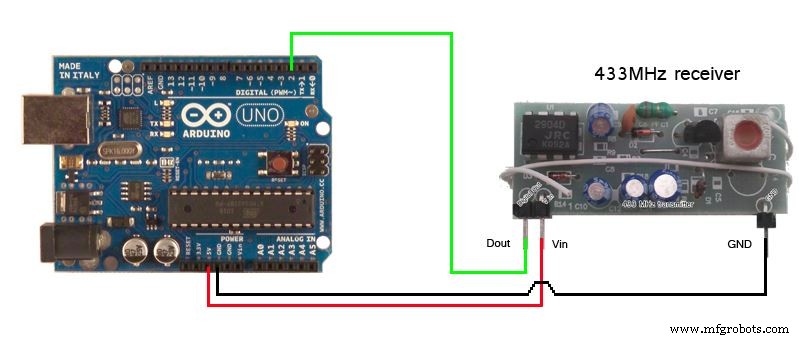
Stap 4:De ontvanger configureren
De ontvanger werkt op 433 MHz, Arduino's programma wordt continu doorgelust om de signaalpoort van de ontvanger te controleren. Zodra het juiste signaal is ontvangen, activeert Arduino vervolgens relais 1(R1) zodat relais 2(R2) de stroom naar de motor kan leiden.
Wanneer gegevens door de zender worden verzonden, worden deze door de ontvanger ontvangen in de vorm van een geheel getal. In mijn geval kon ik met behulp van de seriële monitor van de Arduino de waarde zien die de ontvanger kon oppikken.
De belangrijkste redenen om een hogere radiofrequentie voor communicatie te gebruiken, is dat het werkbereik hoog is en het signaal door de ontvanger wordt ontvangen, zelfs als er een paar obstakels zijn die het signaal blokkeren. Dit kan alleen worden bereikt door hoogfrequente radiogolven.
In mijn project was ik in staat om een werkbereik van ongeveer 30ft te krijgen om het systeem te activeren.
Opmerking: De actieradius van het systeem kan met een paar voet worden vergroot door een lange draad aan de Antenne te solderen poort in de ontvangermodule.

Demovideo
Momentopnamen van het definitieve project
Schema's
Productieproces
- RASPBERRY PI HOME AUTOMATION
- Raspoulette-prototype
- Windkracht
- Gids voor krachthamers
- Draaicentrum met 75 pk hoog koppel spilmotor
- Industrie 4.0 in productie:de groeiende kracht van automatisering
- Wat is een lineaire motor?
- Persautomatisering begrijpen
- Wat is een servomotor?
- Wat is een Power Chuck?
- De kracht van AI in industriële automatisering