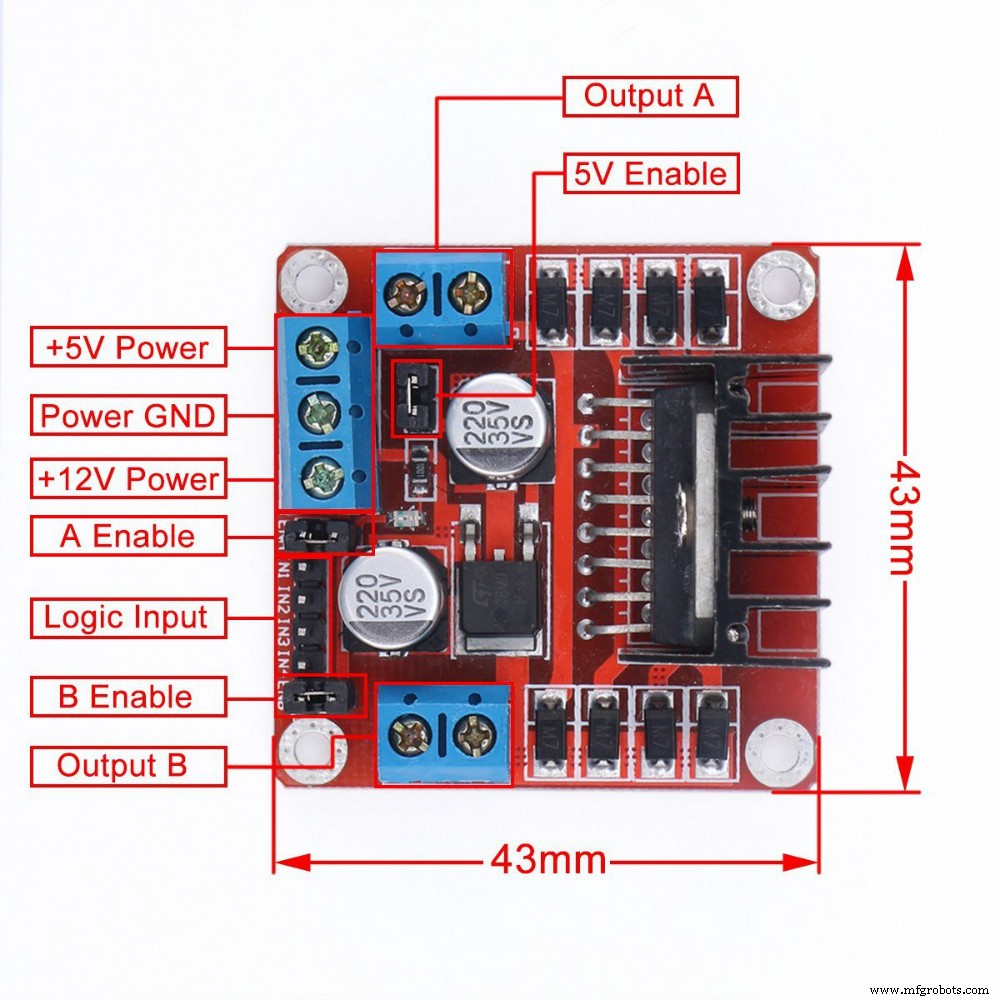
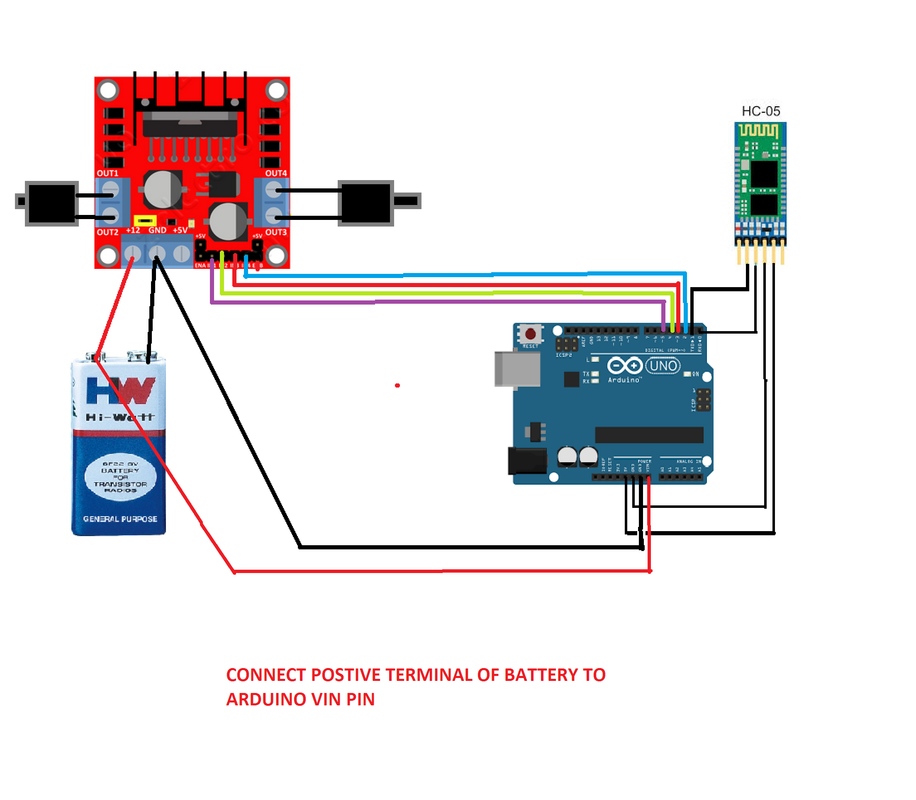
dit is de l298 motor driver [ena, in1, in2-motor A], [enb, in3, in4-motor B], ena &enb zijn voor snelheidsregeling van motor A en motor B.
Ik heb een uitgebreide uitleg van de code gegeven, volg de code en maak de schakeling. Zorg ervoor dat u alle componenten correct hebt geaard voordat u de voeding inschakelt.
Code
hydraulic.inoArduino
// 1e en 2e motordriver is voor de ARM-besturing// 3e motordriver is voor het LOCOMOTIVE-deel//1e motordriver [BASE (2,3) EN SCHOUDER (4,7)]int m1IN1 =2; //in1int m1IN2 =3; //in2int m1IN3 =4; //in3int m1IN4 =5; //in4int m1ENA =6; // voor snelheidsregeling wordt snelheidsregeling hier niet gebruikt, dus hield het HOOG tijdens het rijden en maak het LAAG om de motorint te stoppen m1ENB =7; // voor snelheidsregeling wordt snelheidsregeling hier niet gebruikt, dus hield het HOOG wanneer in beweging en maak het LAAG om de motor te stoppen//2nd Motor driver [ELLBOW (8,9) EN GRIPPER (12,13)]int m2IN1 =8; //in1int m2IN2 =9; //in2int m2IN3 =10; //in3int m2IN4 =11; //in4int m2ENA =12; // voor snelheidsregeling wordt snelheidsregeling hier niet gebruikt, dus hield het HOOG tijdens het rijden en maak het LAAG om de motorint te stoppen m2ENB =13; // voor snelheidsregeling wordt snelheidsregeling hier niet gebruikt, dus hield het HOOG tijdens het rijden en maak het LAAG om de motor te stoppen//3e Motorbesturing [CAR (INI,IN2)=RIGHT (IN3,IN4)=LEFT]int m3IN1=14; // in1 14- A0-pin op arduinoint m3IN2=15; // in2 15-A1int m3IN3=16; // in3 16-A2int m3IN4=17; // in4 17-A3int m3ENA=18; // ena 18-A4 ,hier kun je snelheidsregeling gebruiken om de snelheid van het locomotiefgedeelte te regelen, daarvoor moet je de analogWrite() gebruiken in plaats van digitalWrite()int m3ENB=19; // enb 19-A5 ,hier kun je snelheidsregeling gebruiken om de snelheid van het locomotiefgedeelte te regelen, daarvoor moet je de analogWrite() gebruiken in plaats van digitalWrite()void setup(){ pinMode(m1IN1,OUTPUT); pinMode (m1IN2, UITGANG); pinMode (m1IN3, UITGANG); pinMode (m1IN4, UITGANG); pinMode (m2IN1,UITGANG); pinMode (m2IN2, UITGANG); pinMode (m2IN3, UITGANG); pinMode (m2IN4, UITGANG); pinMode (m1ENA, UITGANG); pinMode (m1ENB, UITGANG); pinMode (m2ENA, UITGANG); pinMode (m2ENB, UITGANG); pinMode (m3IN1,UITGANG); pinMode (m3IN2, UITGANG); pinMode (m3IN3, UITGANG); pinMode (m3IN4, UITGANG); pinMode (m3ENA, UITGANG); pinMode (m3ENB, UITGANG); Serial.begin(9600);}void loop(){ char ip='0'; while(Serial.available()>0) // controleer of de seriële poort een waarde ontvangt van de hc05 of niet { ip=Serial.read(); // leest de gegevens van de seriële poortvertraging (10); } switch (ip) { case '6':// SCHOUDER OMHOOG digitalWrite (m1IN3,HIGH); digitalWrite (m1IN4, LAAG); digitalWrite(m1ENA,HIGH); digitalWrite(m1ENB,HOOG); pauze; case '5' :// SCHOUDER OMLAAG digitalWrite(m1IN3,LOW); digitalWrite (m1IN4, HOOG); digitalWrite(m1ENA,HIGH); digitalWrite(m1ENB,HOOG); pauze; case '1' :// ELLEBOOG OMHOOG digitalWrite(m2IN3,HIGH); digitalWrite (m2IN4, LAAG); digitalWrite(m2ENA,HOOG); digitalWrite(m2ENB,HOOG); pauze; case '2' :// ELLEBOOG OMLAAG digitalWrite(m2IN3,LOW); digitalWrite (m2IN4,HOOG); digitalWrite(m2ENA,HOOG); digitalWrite(m2ENB,HOOG); pauze; case '8' :// GRIP CONTRACT digitalWrite(m2IN1,HIGH); digitalWrite (m2IN2,LAAG); digitalWrite(m2ENA,HOOG); digitalWrite(m2ENB,HOOG); pauze; case '7' :// GRIP EXPAND digitalWrite(m2IN1,LOW); digitalWrite(m2IN2,HOOG); digitalWrite(m2ENA,HOOG); digitalWrite(m2ENB,HOOG); pauze; case '3' :// BASISKLOK digitalWrite(m1IN1,HIGH); digitalWrite (m1IN2,LAAG); digitalWrite(m1ENA,HIGH); digitalWrite(m1ENB,HOOG); pauze; case '4' :// BASE ANTICLOCK digitalWrite(m1IN1,LOW); digitalWrite(m1IN2,HOOG); digitalWrite(m1ENA,HIGH); digitalWrite(m1ENB,HOOG); pauze; geval '9' :// UIT digitalWrite(m1IN1,LOW); digitalWrite (m1IN2,LAAG); digitalWrite (m1IN3, LAAG); digitalWrite (m1IN4, LAAG); digitalWrite(m1ENA,LAAG); digitalWrite (m1ENB, LAAG); digitalWrite (m2IN1,LAAG); digitalWrite (m2IN2,LAAG); digitalWrite (m2IN3, LAAG); digitalWrite (m2IN4, LAAG); digitalWrite(m2ENA,LAAG); digitalWrite(m2ENB,LAAG); digitalWrite (m3IN1,LAAG); digitalWrite (m3IN2,LAAG); digitalWrite (m3IN3, LAAG); digitalWrite (m3IN4, LAAG); digitalWrite(m3ENA,LAAG); digitalWrite (m3ENB, LAAG); pauze; geval 'A' :// FORWARD digitalWrite(m3IN1,HIGH); digitalWrite (m3IN2,LAAG); digitalWrite (m3IN3, HOOG); digitalWrite (m3IN4, LAAG); digitalWrite(m3ENA,HOOG); digitalWrite(m3ENB,HOOG); pauze; geval 'D' :// ACHTERWAARTS digitalWrite(m3IN1,LOW); digitalWrite(m3IN2,HOOG); digitalWrite (m3IN3, LAAG); digitalWrite (m3IN4, HOOG); digitalWrite(m3ENA,HOOG); digitalWrite(m3ENB,HOOG); pauze; geval 'B' :// RECHTS digitalWrite(m3IN1,LOW); digitalWrite(m3IN2,HOOG); digitalWrite (m3IN3, HOOG); digitalWrite (m3IN4, LAAG); digitalWrite(m3ENA,HOOG); digitalWrite(m3ENB,HOOG); pauze; case 'C' :// LINKS digitalWrite(m3IN1,HIGH); digitalWrite (m3IN2,LAAG); digitalWrite (m3IN3, LAAG); digitalWrite (m3IN4, HOOG); digitalWrite(m3ENA,HOOG); digitalWrite(m3ENB,HOOG); pauze; }} Aangepaste onderdelen en behuizingen
hydraulic_crane_J6NH7RouoB.apkuse m-seal om de moeren met de motor te passen. 
 Bevestig de moer op de zuiger van de spuit met behulp van m-seal.
Bevestig de moer op de zuiger van de spuit met behulp van m-seal.  bevestig de spuit en motor op deze manier
bevestig de spuit en motor op deze manier 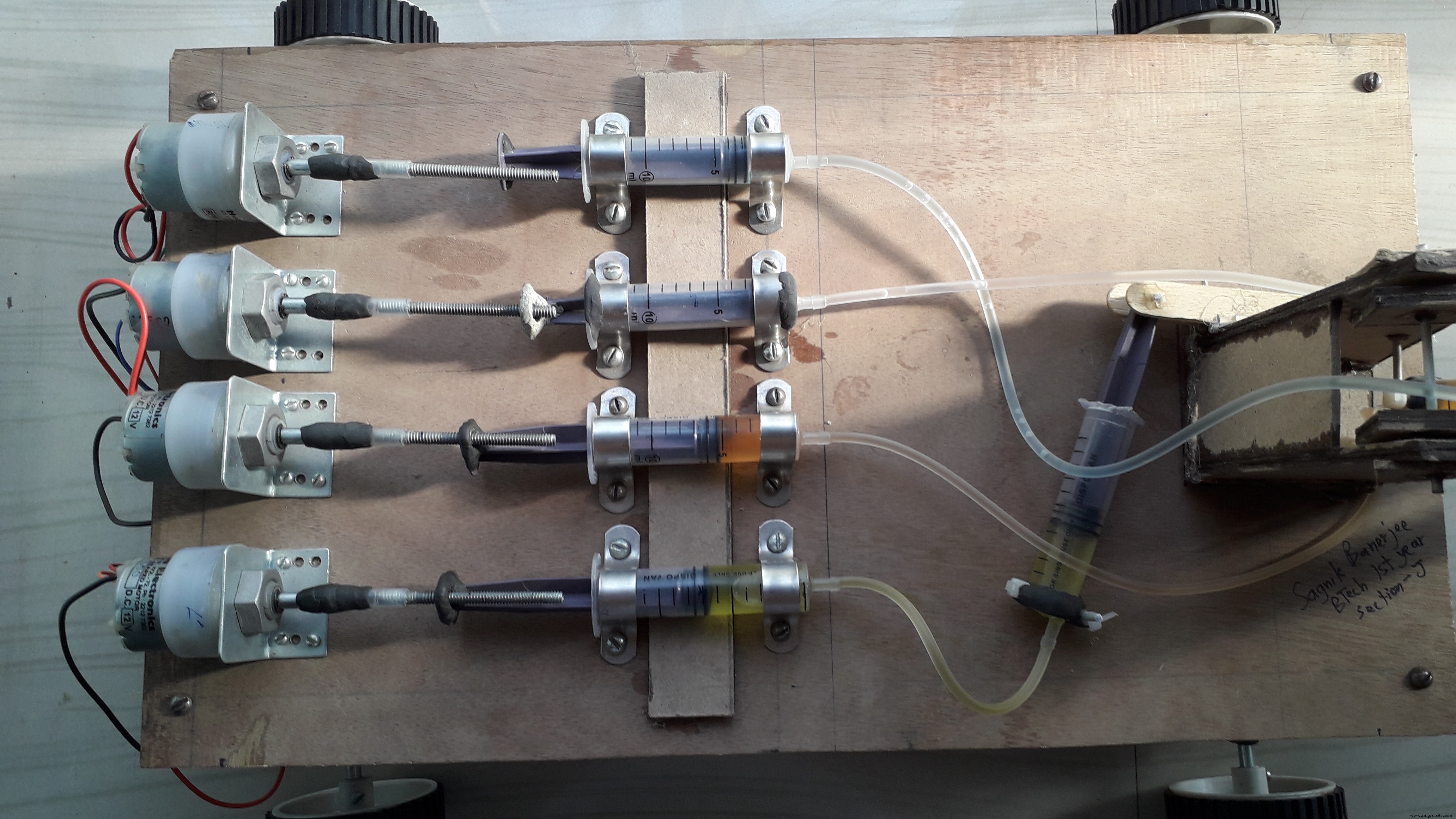 wanneer de motor met de klok mee draait, duwt hij de zuiger en als hij tegen de klok in draait, trekt hij aan de zuiger
wanneer de motor met de klok mee draait, duwt hij de zuiger en als hij tegen de klok in draait, trekt hij aan de zuiger  https://www.youtube.com/watch?v=lhOF6cViZ4Q
https://www.youtube.com/watch?v=lhOF6cViZ4Q