


Desinfecterende robot met ultraviolet licht
Componenten en benodigdheden
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 1 |
Benodigde gereedschappen en machines
 |
|
Over dit project
Inleiding tot de robot
Ultraviolet kiemdodende robot (UV-robot) is een telebediende robot uitgerust met een UV-lichtsysteem. Het systeem bevat een bewegend robotvoertuig en een grondstationcontroller (GCS). De operator kan de robot besturen met behulp van de joystick van de grondstationcontroller (GCS) terwijl hij de camerafeed van de robot observeert.
De robot kan met ultraviolet licht ziekten, virussen, bacteriën en andere soorten schadelijke organische micro-organismen in de omgeving desinfecteren en doden door hun DNA-structuur af te breken. Momenteel hebben verschillende landen deze robots met succes getest om hun ziekenhuizen, openbaar vervoer, kantoorruimtes en andere openbare plaatsen te desinfecteren. We hebben deze UV-robot op een kosteneffectieve manier geïmplementeerd om het desinfectieproces uit te breiden naar openbare plaatsen.
Waarom geen desinfecterende vloeistoffen?

De meest gebruikelijke en populaire methode om openbare plaatsen te desinfecteren, is het sproeien van desinfecterende vloeistoffen die voor 70% op alcohol zijn gebaseerd. Onlangs heeft de Wereldgezondheidsorganisatie (WHO) aangekondigd dat het echt schadelijk is om regelmatig desinfecterende vloeistoffen op openbare plaatsen te gebruiken. Dit kan door hun sterke geur problemen in de luchtwegen veroorzaken, huidirritatie veroorzaken en tot onbalans in de omgeving leiden.
Verder gaat deze methode dagelijks gepaard met enorme materiaal- en arbeidskosten.
Voordelen van de UV-robot
- Eenmalige kosten (geen noodzaak om alcohol of chloorvloeistof bij te vullen).
- Kan worden gebruikt om oppervlakken, medische pakken, medische maskers en andere medische apparatuur te desinfecteren.
- Verkort de desinfectietijd met 60% in vergelijking met op vloeistof gebaseerde desinfectiemethoden. (De droogtijd is aanzienlijk hoog bij gebruik in omgevingen waar stoffen beschikbaar zijn).
- Mogelijkheid om te gebruiken voor omgevingen met elektronische apparatuur.
- Eén operator kan een groot gebied bestrijken. (Geen behoefte aan meerdere mensen zoals in vloeibare sprays)
- We hebben een 99,997% desinfectiegraad getest en bewezen voor deze robot in samenwerking met een microbiologisch laboratorium in een lokale universiteit. (Uitgelegd in de laatste sectie)
Ultraviolette kiemdodende bestraling (UVGI)
Ultraviolette kiemdodende bestraling (UVGI) is een desinfectiemethode die gebruikmaakt van ultraviolet (ultraviolet C of UVC) licht met een korte golflengte om micro-organismen te doden of te inactiveren door nucleïnezuren te vernietigen en hun DNA te verstoren, waardoor ze niet in staat zijn om vitale cellulaire functies uit te voeren. UVC wordt geabsorbeerd door RNA- en DNA-basen en kan de fotochemische fusie van twee aangrenzende pyrimidines tot covalent gekoppelde dimeren veroorzaken, die vervolgens niet-parende basen worden.
UVGI wordt gebruikt in een verscheidenheid aan toepassingen, zoals voedsel-, lucht- en waterzuivering. UVGI kan worden gebruikt om de verspreiding van bepaalde infectieziekten te voorkomen. Lagedrukkwikontladingslampen en LED's worden vaak gebruikt in UVGI-toepassingen en zenden kortegolf ultraviolet-C (100-280 nanometer) straling uit, voornamelijk bij 254 nm.
Elk type micro-organisme heeft een andere dosis UV-licht nodig om zijn functionaliteit te inactiveren. Gezien de Covid-19-situatie wordt hier de inactivatie van hetzelfde virus met behulp van UV-licht overwogen. In de meeste onderzoekspapers en artikelen hebben onderzoeksgroepen het vereiste UV-licht voor het sterilisatieproces genoemd in termen van "Joule per vierkante meter" of "Joule per vierkante centimeter". Maar als we kijken naar de parameters en specificaties van het UV-licht, hebben de fabrikanten de UV-lichtintensiteit gegeven in termen van "Microwatt (uW) per vierkante centimeter" op een afstand van 1 meter.
De eenheid "Watt(W)" geeft de energie weer die binnen een periode van één seconde wordt uitgestraald. Microwatt per vierkante centimeter staat voor de energie die binnen één seconde door een oppervlakte van één vierkante centimeter gaat.
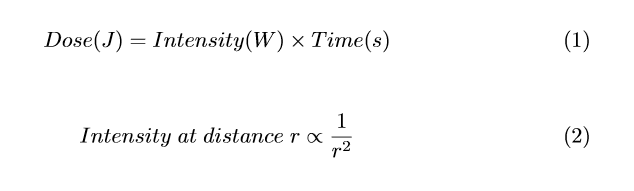
Vergelijking 1 toont de relatie tussen de dosering en de intensiteit. Het concludeert dat verschillende doseringen kunnen worden bereikt door de blootstellingstijd aan dezelfde UV-lichtbron te variëren.
De relatie tussen de UV-intensiteit en de afstand wordt weergegeven door vergelijking 2. Daaruit kan worden geconcludeerd dat de UV-intensiteit lager wordt naarmate de afstand tot de lichtbron toeneemt.
Volgens Wikipedia kan een dosering van 8mJ de meeste virussen inactiveren.
De functionaliteit van de robot begrijpen
Het algehele systeem is een beetje ingewikkeld omdat we enkele functionaliteiten en veiligheidsvoorzieningen hebben toegevoegd om te voldoen aan de industrienormen. Voordat u de implementatieprocedure uitlegt, is het goed om te begrijpen hoe het systeem werkt.
De robot heeft 3 hoofdcomponenten.

Dit onderdeel wordt voortbewogen door twee wielen die worden aangedreven door gelijkstroommotorreductoren (een robot met differentiële aandrijving). Er zijn twee zwenkwielen aan de voor- en achterkant om het evenwicht te bewaren. We hebben het elektronische regelsysteem en de batterij, een 12V 35Ah-loodzuurbatterij, in het grondvoertuig geplaatst.
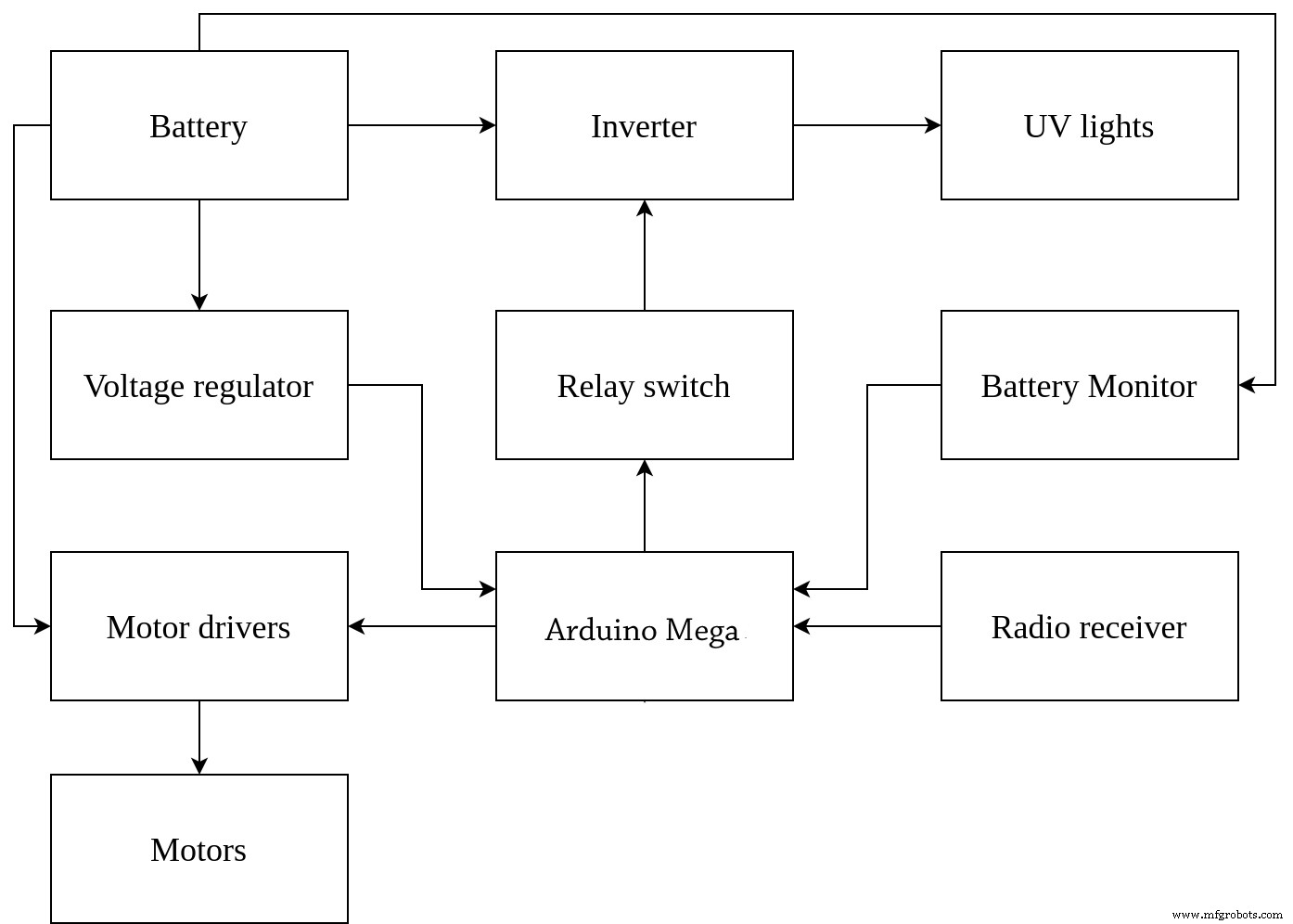
Arduino Mega wordt gevoed met de hoofdbatterij via een spanningsregelaarmodule om de spanning te verlagen van 12V naar 5V. Op het Mega-board wordt een vierkanaals RC-radio-ontvanger met PWM-uitgangen aangesloten. Motoren worden aangedreven via een tweekanaals H-brugmotordriver die is aangesloten op het Arduino-bord. Een omvormer is aangesloten tussen de UV-lampen en de batterij en wordt bestuurd met behulp van een relaisschakelaar die is aangesloten op het Arduino-bord.
We hebben TL-UV-lampen gebruikt die een aparte elektronische ballasteenheid nodig hebben om de lamp van stroom te voorzien. De lichttoren bevat 6 UV-lampen die rond een aluminium cilinder worden geplaatst die door deze op te rollen uit een aluminium plaat wordt gemaakt. Deze aluminium cilinder fungeert als reflector voor UV-stralen.
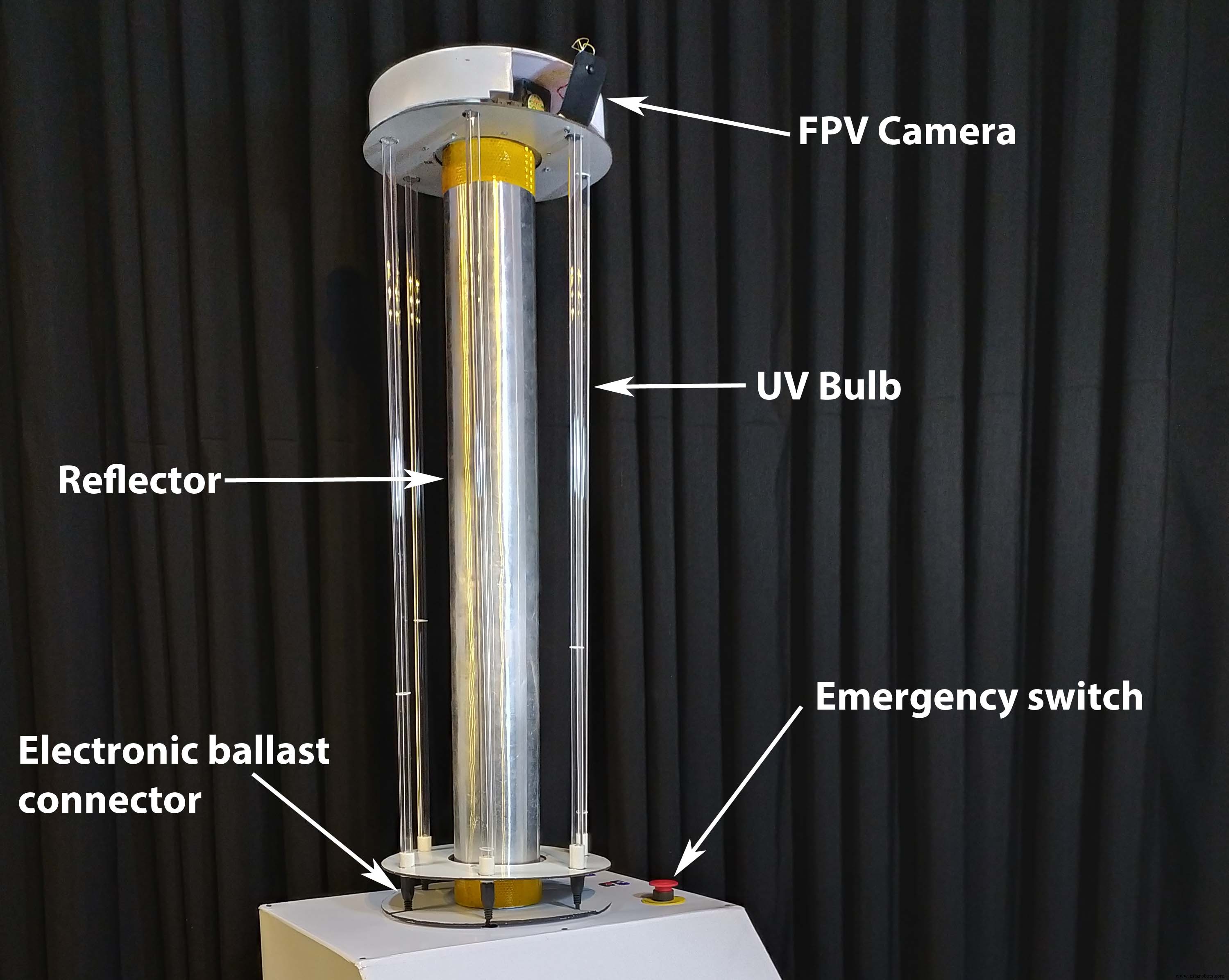
Alle elektronische voorschakelapparaten zijn in de aluminium cilinder geplaatst. Op de top van de toren bevindt zich een FPV-camera en een FPV-zender om de videofeed naar de GCS te verzenden. De UV-toren wordt bovenop het grondvoertuig bevestigd.

Dit is de afstandsbediening van de robot. Het scherm toont de camerafeedback die van de robot is ontvangen. De joystick wordt gebruikt om de robot te bewegen. UV-lampen kunnen worden in- en uitgeschakeld met behulp van de UV-schakelaar. De activeringsschakelaar fungeert als veiligheidsschakelaar. Het vermindert alle functionaliteiten van het inschakelen.
UV-lampen inschakelen

Voor onze robot hebben we 6 UV-lampen geselecteerd met de volgende specificaties.
- Vermogen - 55w
- Golflengte - 254nm
- lengte - 890 mm
- diameter buis - 15 mm
- type - enkel uiteinde 4-pins
Dit zijn geen strikte specificaties behalve de golflengte. Het elektronische voorschakelapparaat wordt aangesloten op de 4 pinnen van de UV-lamp. UV-lampen gaan branden wanneer de elektronische ballast van stroom wordt voorzien.
***UV-licht is schadelijk voor de menselijke huid en ogen. Stel uw ogen en huid niet voor langere tijd bloot. Het licht door glas observeren is de veiligste procedure omdat UV-licht niet door transparant glas kan dringen.***
FPV-videosysteem
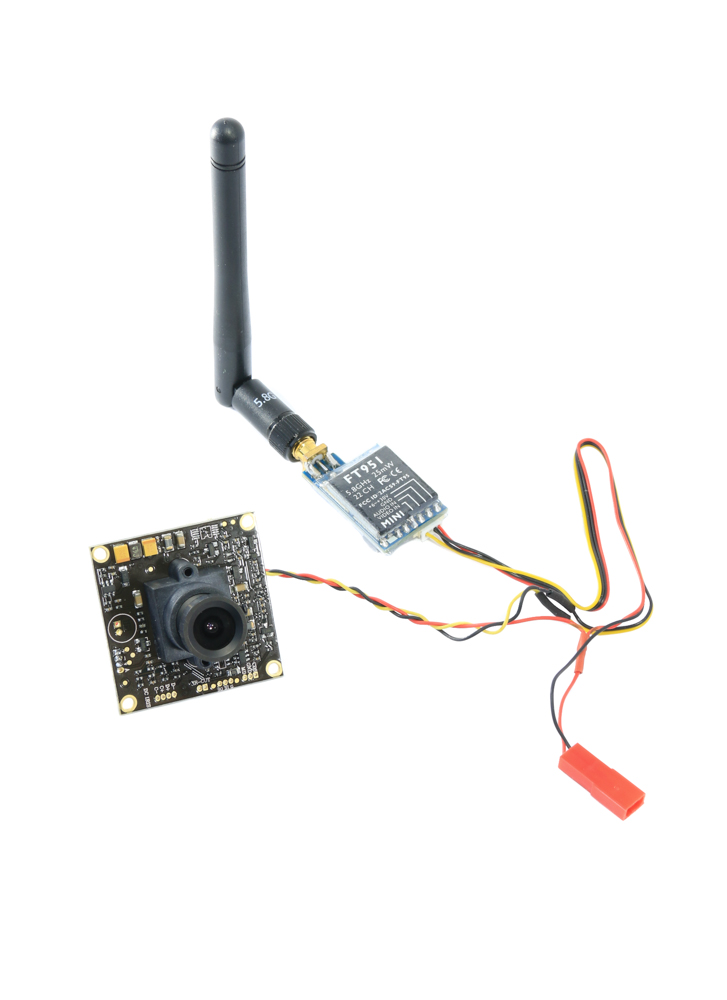

FPV videosystemen worden voornamelijk gebruikt in drones om het vogelperspectief te krijgen. In ons geval maakt het gebruik van een FPV-systeem het gemakkelijk om de videofeed van de robot te krijgen zonder programmeer- of soldeercomponenten. De robot heeft een camera en een videozender. We hoeven alleen de stroom op dit systeem aan te sluiten en het begint de videofeed te verzenden met 5,8 GHz.
De GCS heeft het LCD-scherm met een ingebouwde 5.8GHz video-ontvanger. Zodra u het scherm aanzet, wordt de camerafeed weergegeven.
Het grondvoertuig bouwen
De hoofdstructuur is gemaakt van 0,75 'stalen kokerstaven. Hieronder volgt het ontwerp dat voor onze robot is gebruikt, maar laat u er niet toe beperken. Wijzig het ontwerp volgens uw vereisten.
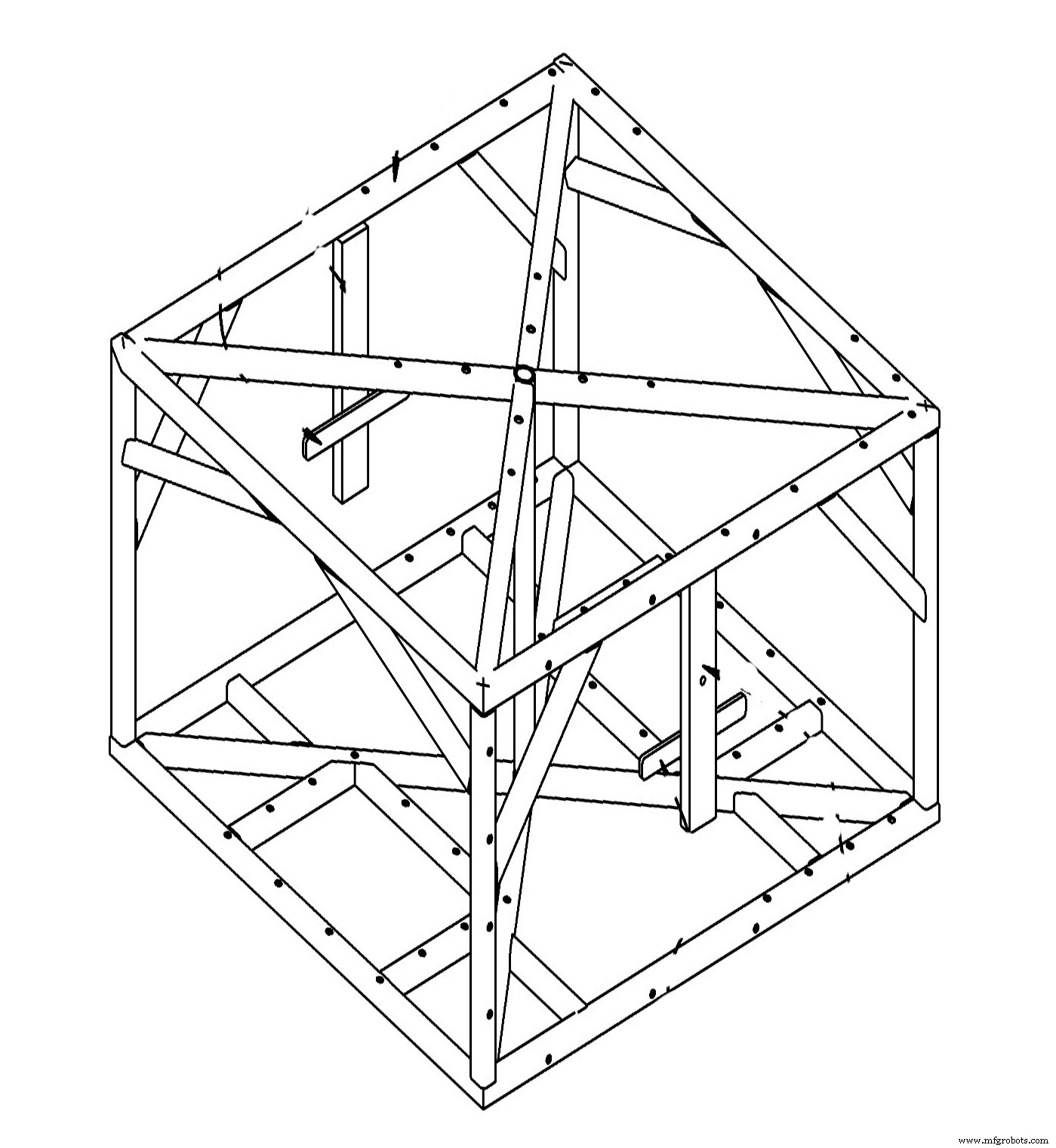
Het frame moet ruimte en een mechanisme hebben om aan de onderkant twee motoren en twee zwenkwielen te monteren. Binnen in de structuur moet er een mechanisme zijn om de loodzuurbatterij te vergrendelen. In onze robot hebben we bekledingsplaten gebruikt om het frame te bedekken.
De draden van de twee motoren zijn verbonden met de uitgangspinnen van de motordriver. Deze procedure is gemakkelijk te vinden op internet en is daarom niet bedoeld om de hele procedure te beschrijven.
Het schema van het elektronische regelsysteem is als laatste bijgevoegd. Kanaal 1 - kanaal 4 PWM-signaalpinnen van de RC-ontvanger zijn verbonden met het Arduino-bord vanaf pin 18 - 21. Elk kanaal is op de volgende manier geconfigureerd in de code. Je kunt het naar wens veranderen.
- Ch 1 - UV-schakelaar
- Hoofdstuk 2 - Robotinschakelschakelaar
- Hoofdstuk 3 - Vooruit/achteruit bewegende commando's
- Hoofdstuk 4 - Links/rechts draaiende commando's
Dit kan ook worden gewijzigd bij het bouwen van de GCS.
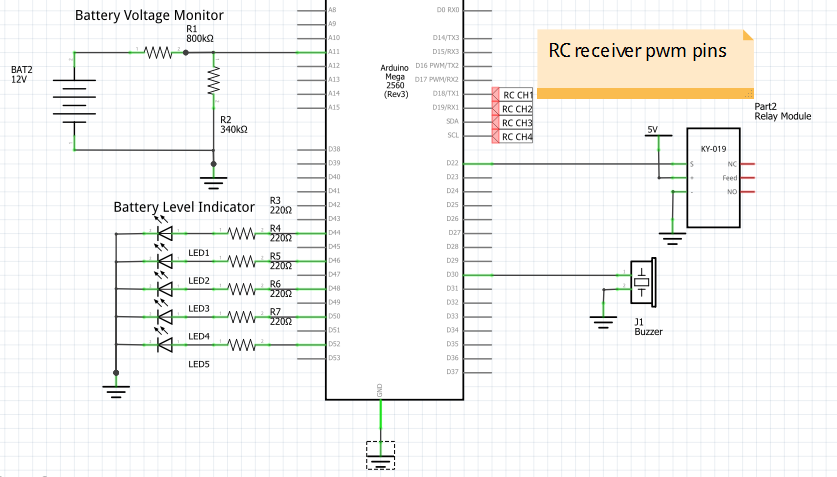
De pinnen van de motordriver zijn verbonden met Arduino pin 3 - 11 zoals weergegeven in het schema.
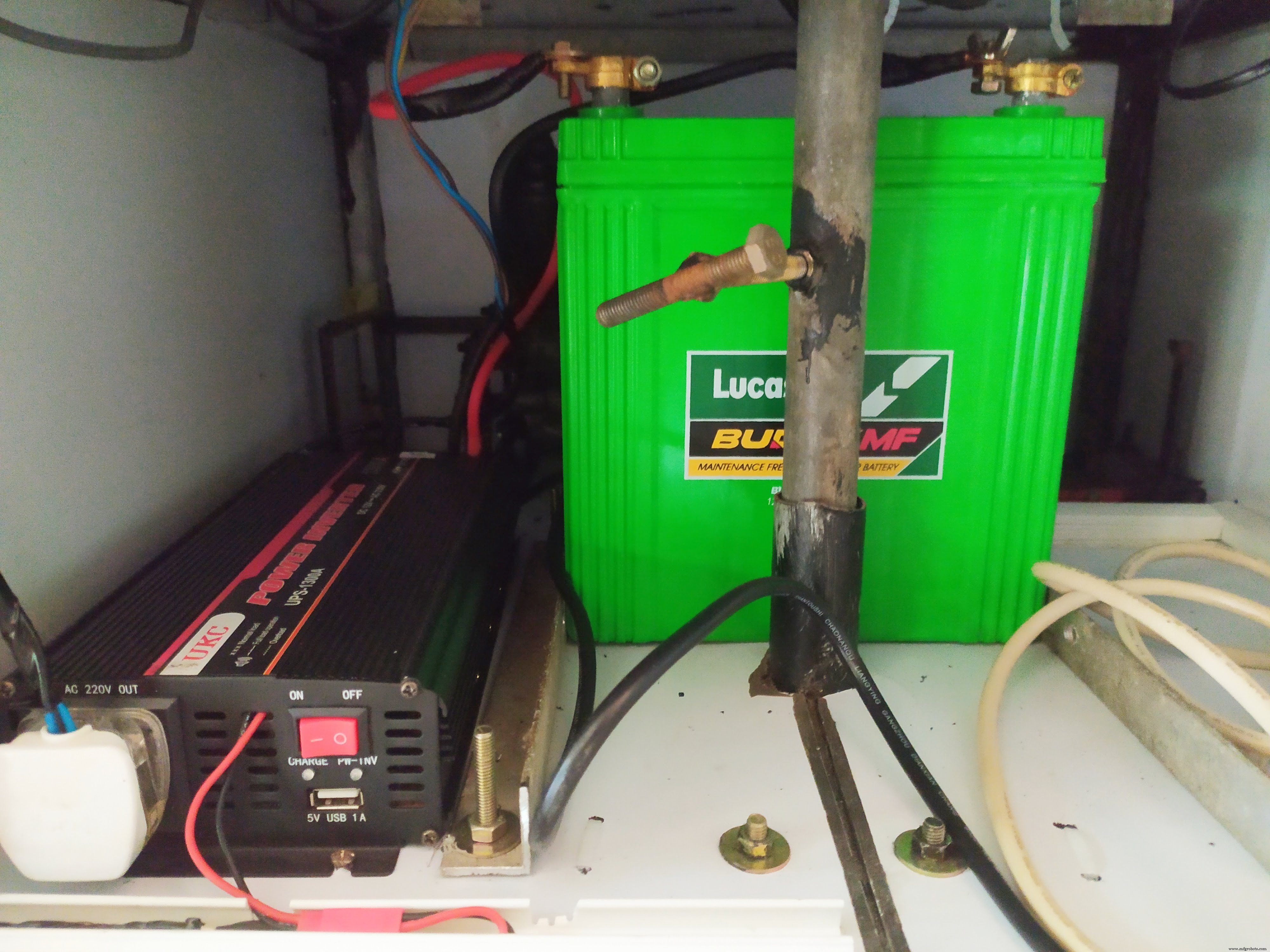
Om de 12v om te zetten naar AC 230V om de UV-lampen van stroom te voorzien, wordt hier een invertercircuit gebruikt. We hebben een in de handel verkrijgbare omvormer gekocht met een ingebouwde oplader. Dit helpt de complexiteit van het elektronische systeem te voorkomen doordat we de loodzuuraccu kunnen opladen via de bestaande stopcontacten.

In ons geval hebben we een gemodificeerde sinusomvormer gebruikt met een rendement van ongeveer 70%. Om alle elektronische ballast van stroom te voorzien met het rendement van 70% is het vereiste wattage van de omvormer 470W. Met alle veiligheidsmarges hebben we een 1kW omvormer aangeschaft.,
Accupolen zijn aangesloten op de 12V-ingang en E.-ballasten zijn aangesloten op de AC-uitgangspoorten. De aan/uit-schakelaar is verwijderd. Er zijn 3 draden beschikbaar in de schakelaar; gemeenschappelijke draad, aardedraad en de stroom op draad. Deze 3 draden zijn op de volgende manier verbonden met de relaisschakelaar om de UV-lampen van het Arduino-bord te bedienen.
- Gemeenschappelijke draad -> Gemeenschappelijk
- Aarddraad -> NC
- Stroom op draad -> NEE
We hebben een aan-/uitschakelaar voor het systeem, een UV-aan-schakelaar en een noodstopschakelaar toegevoegd om de robot te laten voldoen aan de industriële normen.
De UV-lichttoren bouwen
Het middelste deel van de toren bevat een aluminium plaat. Een vel wordt opgerold tot een cilinder met een diameter van 15 cm. Boven en onder op de cilinder worden twee cirkelvormige bekledingsplaten met een diameter van 30 cm geplaatst. Deze worden gebruikt als UV-lamphouder. In beide bekledingsplaten zijn gaten van 19 mm geboord om in het UV-licht te passen. E.ballasten worden in de aluminium cilinder bevestigd met dubbelzijdig plakband.


Het FPV-camerasysteem wordt bovenop de toren gemonteerd en twee draden worden door de cilinder naar beneden geleid.
Het grondbedieningsstation bouwen

Hieronder volgen de onderdelen die nodig zijn voor het grondbedieningsstation (GCS).
- 2.4GHZ 4Ch RC-zender
- FPV-scherm
- 2 X-tuimelschakelaars
- 1 X Aan/uit-schakelaar
- 18650 batterijcellen
- 3-cellige batterijbeheersysteemmodule voor 18650
- 12V, 5A schakelende voeding
Rc zender bevat 2 joysticks en diverse schakelaars. Hier is onze interesse slechts op één joystick, het circuit en de indicatie-LED. Verwijder de behuizing van de zender en kijk hoe de joysticks door het circuit worden gedetecteerd. Elke joystick bevat twee potentiometers die op de printplaat zijn aangesloten. Op basis van de positie van de joystick verandert de potentiometer zijn weerstand zodat het circuit de positie van de joystick kan lezen.
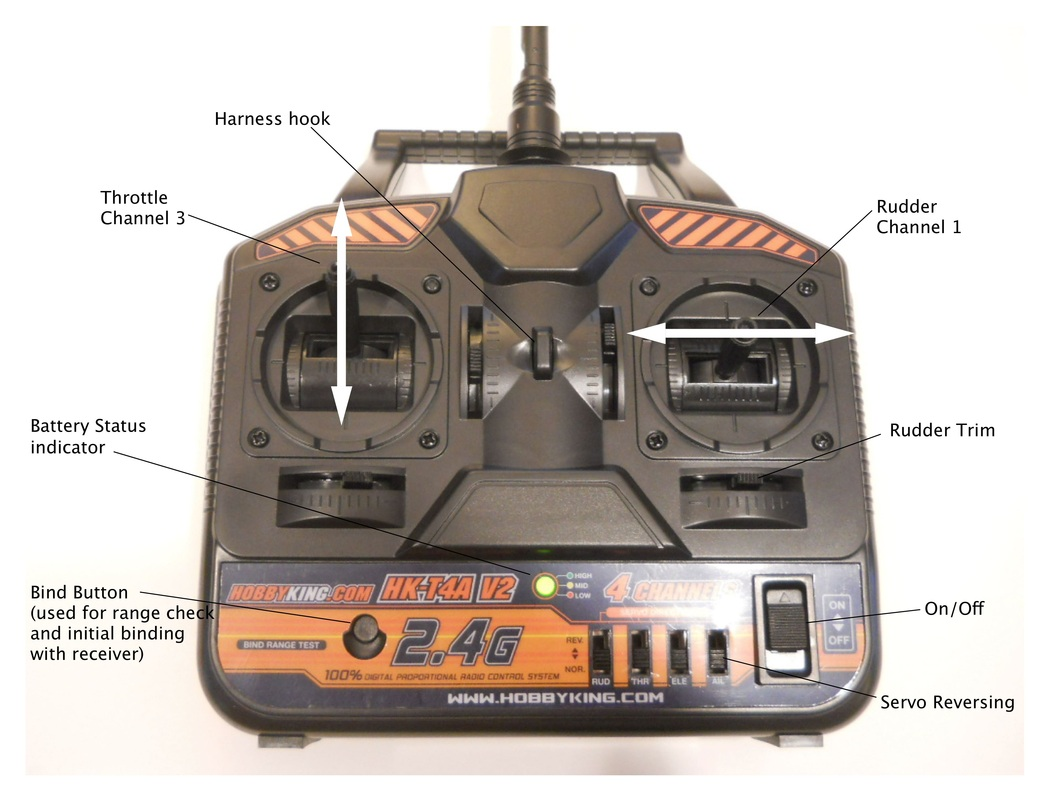
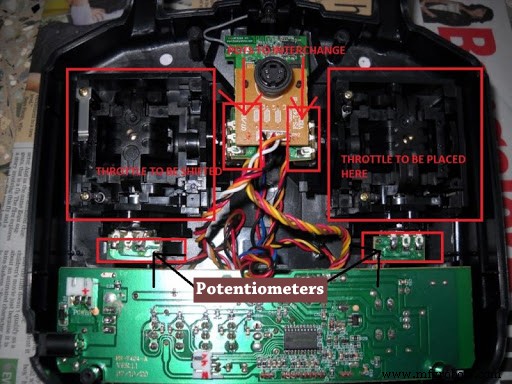
Verwijder een joystick en de twee potentiometers. Soldeer de respectievelijke draaduiteinden aan de twee tuimelschakelaars. Nu hebben we één joystick en twee tuimelschakelaars om alle 4 kanalen te bedienen. Eén schakelaar fungeert als de schakelaar voor het inschakelen van de robot en de andere als de schakelaar voor het regelen van UV-licht. De indicator-LED kan worden gebruikt als de batterijmonitor van de GCS, aangezien deze van kleur verandert in rood wanneer de batterij bijna leeg is.
Nu moeten we een voeding maken voor de zender en voor het FPV-scherm. De celspanning van een 18650 batterij is 3.7V. Als hij volledig is opgeladen, wordt hij 4,2 V. Hiervoor schakelen we 3 cellen in serie om ongeveer 12V te krijgen. In ons geval gebruikten we cellen met een capaciteit van 1000 mAh. Om de looptijd van de GCS te verlengen, hebben we 9 batterijen, 3, in serie geschakelde cellensets parallel gebruikt om een capaciteit van 3000 mAh te krijgen. Vervolgens de GBS-module aangesloten om de batterij te beschermen.
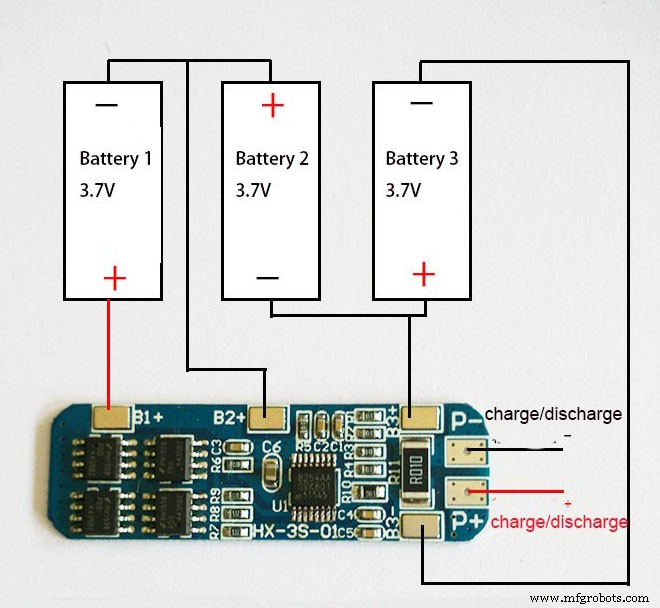
De P+ en P- zijn aangesloten op de voedingsingang van de zender en de voedingsingang van het FPV-scherm. 12V schakelende voeding (SMPS) wordt geleverd met een potentiometer om de uitgangsspanning binnen een beperkt bereik aan te passen. Stel deze in op 12,8 en sluit de spanningsuitgang aan op P+ en P- van het GBS. Dit zal helpen om de batterij op te laden wanneer de SMPS is aangesloten.
U kunt hiervoor een behuizing ontwerpen naar uw voorkeur.
Coderen
De eerste taak van de code is het lezen van de RC-kanaalingangen. Omdat we een PWM-ontvanger gebruiken, heb ik interrupts gebruikt om de PWM-waarden te lezen. Om het u gemakkelijk te maken, heb ik een PWM-bibliotheek toegevoegd om interrupts te gebruiken door de aangesloten pin op de volgende manier te definiëren.
PWM ch1(18); // Stel pin 18 in voor invoer
PWM ch2(19); // Stel pin 19 in voor invoer
PWM ch3 (20); // Stel pin 20 in voor invoer
PWM ch4(21); // Stel pin 21 in voor invoer In de opstartvolgorde controleert de code op de batterijspanning en of de UV-schakelaar is ingeschakeld. Als het een van beide detecteert, wacht de opstartprocedure daar totdat ze allemaal zijn opgelost.
//check accuspanning
battery_voltage_monitor();
while(batterylow ==true){
battery_voltage_monitor();
low_battery_notification();
}
//controleer of de uv-schakelaar is uitgeschakeld
rc_read();
while(uv_pwm> switch_on_pwm){
rc_read();
uv_on_warning_at_startup(); //zoemer
} Bij het draaien van de motoren zakt de accuspanning alleen op dat moment kritisch. Om te voorkomen dat het laagspanningsalarm elke keer dat we de robot verplaatsen wordt geactiveerd, werkt het batterijbewakingsgedeelte alleen als de robot niet beweegt.
if (robot_moving ==false){
battery_voltage_monitor(); // controleer de batterij wanneer de robot niet beweegt
} Alle andere functies, waaronder het besturen van de motordriver, het genereren van tonen met zoemer en het besturen van het relais, werken op de gebruikelijke manier. U kunt een algemene tutorial over bovenstaande onderwerpen volgen als u er niet van op de hoogte bent.
Bedieningsprocedures
Opstartprocedure
GCS-controller
1. Zet de hoofdschakelaar aan.
2. Zorg ervoor dat zowel de robotinschakelschakelaar als de UV-lichtschakelaar zijn uitgeschakeld. (In onderste positie).
Robot
1. Zet de aan/uit-schakelaar aan.
2. Wacht op de starttoon.
3. Wacht op de OK-toon van het systeem.
De robot besturen
1. Zet de Robot-inschakelschakelaar aan.
2. Beweeg de joystick om de robot te verplaatsen.
3. Zet de UV-schakelaar aan om de UV-lampen in te schakelen. Als de robotinschakelschakelaar in de uit-stand staat, werkt de UV-schakelaar niet.
Batterijniveau-indicator
1. Zorg ervoor dat de batterij minstens 4 balkjes heeft die knipperen om de robot te bedienen.
2. Wanneer de batterij bijna leeg is, piept de zoemer en knipperen de laatste twee balken van de batterijniveau-indicator.
Oplaadprocedure
1. Schakel de robot uit.
2. Schakel de GCS uit.
3. Sluit de omvormer aan op een stopcontact. (Meestal hebben omvormers een ingebouwde laadniveau-indicator)
Algemene overwegingen
Ultraviolet licht is schadelijk voor de menselijke ogen en huid. Blootstelling aan licht op korte afstand (minder dan 3 m) gedurende meer dan 60 seconden kan de ogen beschadigen en huidirritatie veroorzaken. Ultraviolette stralen kunnen echter niet door een vast medium doordringen. Kijken naar het UV-licht door een transparant glas heeft geen invloed op de menselijke ogen of het lichaam.
Zachte kunststoffen zijn zeer gevoelig voor ultraviolet licht. Zachte kunststoffen worden veel gebruikt in speelgoed en voedselverpakkingen. Daarom kan het apparaat niet worden gebruikt in speelgoedwinkels, supermarkten en waar bovenstaande artikelen verkrijgbaar zijn. De UV-lampen kunnen echter worden gebruikt om vloeren van de bovengenoemde ruimtes te desinfecteren.
In ziekenhuisomgevingen is UV-licht nuttig om high-touch oppervlakken binnen zeer korte tijd te desinfecteren. Maar in dit scenario moet rekening worden gehouden met de effectiviteit van het UV-licht voor medische apparatuur en medicijnen.
Medische apparatuur met kunststof behuizingen is gemaakt van harde kunststoffen omdat ze tijdens het fabricageproces een stralingsbehandeling ondergaan. Verder zijn er geen bewezen effecten voor de effectiviteit van het UV-licht voor de medicijnen die in ziekenhuizen worden bewaard.
Verder kunnen alle roestvrijstalen medische apparatuur en N95-maskers met hetzelfde apparaat worden gesteriliseerd.
Ultraviolet licht reflecteert van oppervlakken zoals het zichtbare licht. Daarom krijgen de gebieden die het directe UV-licht niet krijgen, het gereflecteerde UV-licht. Sterk bedekte of schaduwrijke gebieden krijgen echter geen effectief UV-licht. Deze gebieden worden ook niet gedesinfecteerd met op desinfectievloeistof gebaseerde methoden.
UV-licht genereert ozon bij langdurig werken in gesloten omgevingen. Als algemene praktijk worden alle gesloten omgevingen gedurende 20 minuten geventileerd nadat ze zijn gesteriliseerd met UV-lampen.
Code
Code voor Arduino Mega
https://github.com/tharindusuraj/Ultraviolet-Germicidal-RobotSchema's
uv-x_Q9R5T59Q32.fzzProductieproces
- Een mobiele robot met op zicht gebaseerde obstakelvermijding
- Raspberry Pi Webcam Robot – Beste videostreaming-tutorial
- Raspberry Pi webgestuurde robot met video
- Recycle sorteerrobot met Google Coral
- Obstakels vermijden robot met servomotor
- Automatisch plantenwatersysteem met Arduino
- Amerikaanse volkslied met licht en toon
- Bedien de Arduino-robotarm met Android-app
- WiDC:Wi-Fi-gestuurde FPV-robot
- Video:In-Proces Scannen van een gedraaid profiel—via Robot
- Draaicentrum uitgerust met robotarm