


ULTRASONE LEVITATION-machine die ARDUINO gebruikt
Componenten en benodigdheden
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Benodigde gereedschappen en machines
 |
| |||
 |
| |||
 |
|
Apps en online services
 |
|
Over dit project
Het is heel interessant om iets in de lucht of in de vrije ruimte te zien zweven, zoals buitenaardse ruimteschepen. dat is precies waar een anti-zwaartekrachtproject over gaat. Het object (eigenlijk een klein stukje papier of thermocol) wordt tussen twee ultrasone transducers geplaatst die akoestische geluidsgolven genereren. Het object zweeft in de lucht vanwege deze golven die anti-zwaartekracht lijken te zijn.
laten we in deze tutorial de ultrasone levitatie bespreken en een levitatiemachine bouwen met Arduino
Stap 1:Hoe is dit mogelijk
Om te begrijpen hoe akoestische levitatie werkt, moet je eerst iets weten over zwaartekracht, lucht en geluid. Ten eerste is zwaartekracht een kracht die ervoor zorgt dat objecten elkaar aantrekken. Een enorm object, zoals de aarde, trekt gemakkelijk objecten aan die dichtbij zijn, zoals appels die aan bomen hangen. Wetenschappers hebben niet precies besloten wat deze aantrekkingskracht veroorzaakt, maar ze denken dat het overal in het universum bestaat.
Ten tweede is de lucht een vloeistof die zich in wezen op dezelfde manier gedraagt als vloeistoffen. Net als vloeistoffen bestaat lucht uit microscopisch kleine deeltjes die ten opzichte van elkaar bewegen. Lucht beweegt ook zoals water - sommige aerodynamische tests vinden zelfs onder water plaats in plaats van in de lucht. De deeltjes in gassen, zoals die waaruit lucht bestaat, zijn gewoon verder uit elkaar en bewegen sneller dan de deeltjes in vloeistoffen.
Ten derde is het geluid een trilling die door een medium reist, zoals een gas, een vloeistof of een vast object. als je op een bel slaat, trilt de bel in de lucht. Als een kant van de bel naar buiten beweegt, duwt het de luchtmoleculen ernaast, waardoor de druk in dat deel van de lucht toeneemt. Dit gebied met hogere druk is een compressie. Terwijl de zijkant van de bel weer naar binnen beweegt, trekt het de moleculen uit elkaar, waardoor een gebied met lagere druk ontstaat dat verdunning wordt genoemd. Zonder deze beweging van moleculen zou het geluid niet kunnen reizen, daarom is er geen geluid in een vacuüm.
akoestische levitator
Een eenvoudige akoestische levitator heeft twee hoofdonderdelen:een transducer, een trillend oppervlak dat het geluid maakt, en een reflector. Vaak hebben de transducer en reflector concave oppervlakken om het geluid te helpen focussen. Een geluidsgolf reist weg van de transducer en kaatst terug op de reflector. Drie basiseigenschappen van deze reizende, reflecterende golf helpen het om objecten in de lucht op te hangen.
wanneer een geluidsgolf weerkaatst van een oppervlak, veroorzaakt de interactie tussen zijn compressies en verdunningen interferentie. Compressies die voldoen aan andere compressies versterken elkaar, en compressies die voldoen aan zeldzaamheden balanceren elkaar uit. Soms kunnen reflectie en interferentie worden gecombineerd om een staande golf te creëren . Staande golven lijken heen en weer te schuiven of in segmenten te trillen in plaats van van plaats naar plaats te reizen. Deze illusie van stilte is wat staande golven hun naam geeft. Staande geluidsgolven hebben gedefinieerde knooppunten, of gebieden met minimale druk, en antinodes of gebieden met maximale druk. De knooppunten van een staande golf zijn de oorzaak van akoestische levitatie.
Door een reflector op de juiste afstand van een transducer te plaatsen, creëert de akoestische levitator een staande golf. Wanneer de oriëntatie van de golf evenwijdig is aan de aantrekkingskracht van de zwaartekracht, hebben delen van de staande golf een constante neerwaartse druk en andere hebben een constante opwaartse druk. De knooppunten hebben weinig druk.
zodat we daar kleine voorwerpen kunnen plaatsen en zweven
Stap 2:Benodigde componenten
- Arduino Uno / Arduino Nano ATMEGA328P
- Ultrasone module HC-SR04
- L239d H-brugmodule L298
- Gemeenschappelijke pcb
- 7.4v batterij of voeding
- Verbindingsdraad.
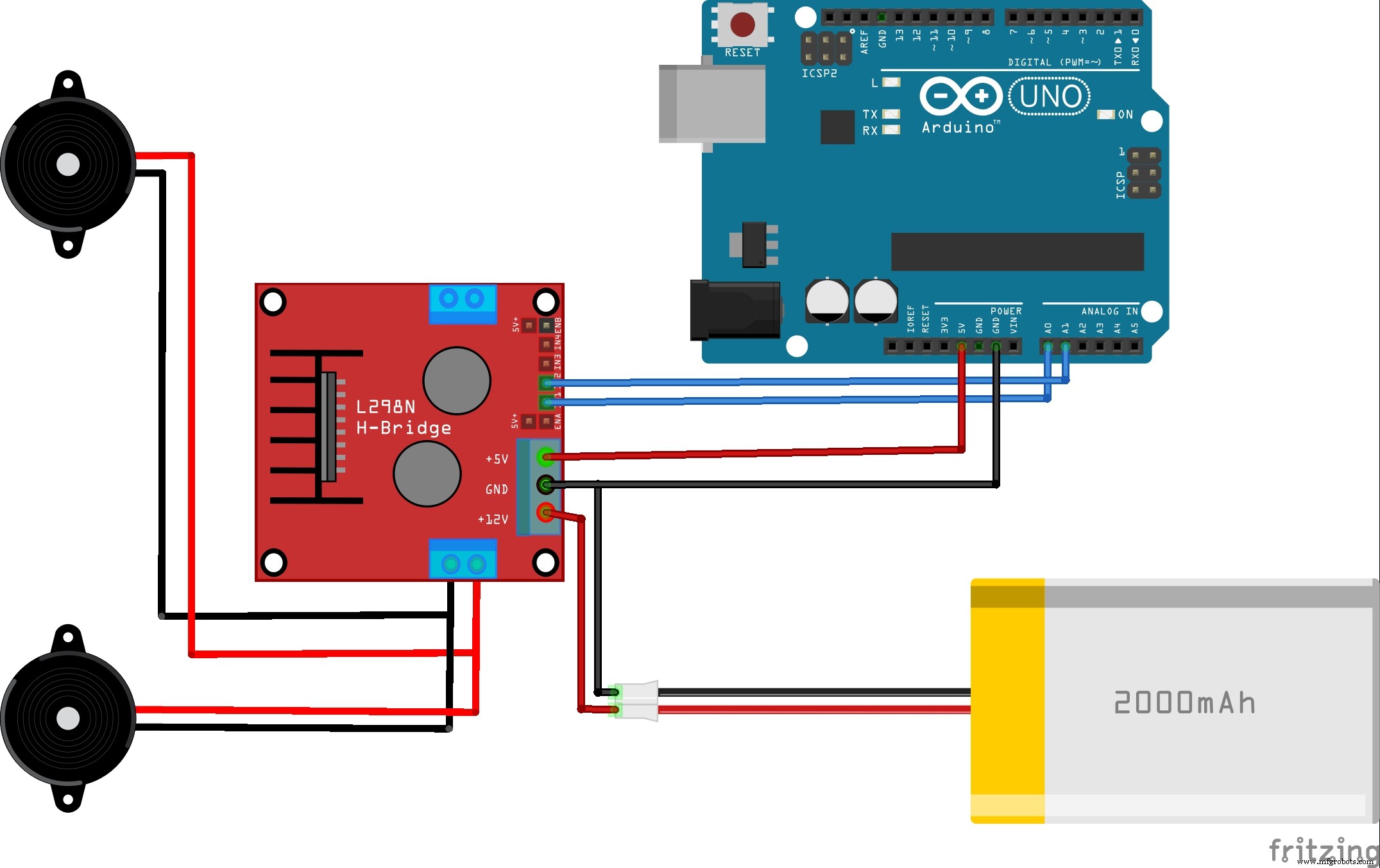
Stap 3:Schakelschema
het werkingsprincipe van de schakeling is heel eenvoudig. Het belangrijkste onderdeel van dit project is een Arduino, L298 motoraandrijf-IC en ultrasone transducer verzameld uit de ultrasone sensormodule HCSR04. Over het algemeen zendt de ultrasone sensor een akoestische golf uit met een frequentiesignaal tussen 25khz en 50 kHz, en in dit project gebruiken we een HCSR04 ultrasone transducer. Deze ultrasone golven maken de staande golven met knopen en buiken.
de werkfrequentie van deze ultrasone transducer is 40 kHz. Het doel van het gebruik van Arduino en dit kleine stukje code is dus om een 40KHz hoogfrequent oscillatiesignaal te genereren voor mijn ultrasone sensor of transducer en deze puls wordt toegepast op de ingang van de duelmotordriver IC L293D (van Arduino A0 &A1-pinnen ) om de ultrasone transducer aan te drijven. Ten slotte passen we dit hoogfrequente 40 KHz-oscillatiesignaal samen met de stuurspanning toe via een aandrijf-IC (meestal 7,4 V) op de ultrasone transducer. Waardoor ultrasone transducer akoestische geluidsgolven produceert. We hebben twee transducers tegenover elkaar geplaatst, zodanig dat er wat ruimte tussen hen overblijft. Akoestische geluidsgolven reizen tussen twee transducers en laten het object zweven. Bekijk de video voor. Meer informatie alles uitgelegd in die video
Stap 4:De transducer maken
Eerst moeten we de zender en ontvanger van de ultrasone module desolderen. Verwijder ook de beschermkap en sluit er vervolgens lange draden op aan. Plaats vervolgens de zender en ontvanger over elkaar. Onthoud dat de positie van ultrasone transducers erg belangrijk is. Ze moeten tegenover elkaar staan, wat erg belangrijk is, en ze moeten in dezelfde lijn liggen zodat ultrasone geluidsgolven kunnen reizen en elkaar in tegengestelde richtingen kunnen kruisen. Hiervoor gebruikte ik foam sheet, nuts and bots
Bekijk de maakvideo voor een beter begrip
Stap 5:Programmeren
De codering is heel eenvoudig, slechts enkele regels. Met behulp van deze kleine code met behulp van een timer en interrupt-functies, maken we hoog of laag (0 / 1) en genereren we een oscillerend signaal van 40 Khz naar Arduino A0- en A1-uitgangspinnen.
download Arduino-code van hier
Stap 6:Verbindingen
sluit alles aan volgens het schakelschema
vergeet niet om beide aardes met elkaar te verbinden
Stap 7:Belangrijke dingen en verbeteringen
De plaatsing van de transducer is erg belangrijk, dus probeer die in de juiste positie te plaatsen
We kunnen alleen kleine stukjes lichtgewicht voorwerpen zoals thermocol en papier optillen
Moet ten minste 2 ampère stroom leveren
Vervolgens probeerde ik grote objecten te laten zweven, daarvoor verhoog ik eerst het nee. Van zenders en ontvangers die niet werkten. Dus vervolgens probeerde ik het met hoogspanning, dat is ook mislukt.
Verbeteringen
Later begreep ik dat ik gefaald had vanwege de. Opstelling van transducers als we meerdere zenders gebruiken, dan moeten we samenwerken in een Curvy-structuur.
Stap 8:Bedankt
Twijfels Reageer hieronder
Code
Samenvatting
https://gist.github.com/EDISON-SCIENCE-CORNER/3ebb7020d0dacbbae949afb8f29bfcc3 Schema's
Productieproces
- Licht dimmen met PWM met drukknop
- FlickMote
- IOT - Smart Jar met ESP8266, Arduino en ultrasone sensor
- Iron Man
- Vind mij
- Hoe de massa van de aarde te meten met Arduino
- Arduino-luchtbevochtigerbediening
- Sonar met arduino en weergave op verwerkings-IDE
- Autoteller met Arduino + Processing + PHP
- Arduino-joystick
- Hoe maak je een kompas met Arduino en Processing IDE?