


Stappenmotor versus DC-motor- Hoe zijn ze verschillend
Elektromotoren zijn essentiële componenten bij het omzetten van elektrische energie in mechanische energie. Hoewel alle motoren dezelfde functie vervullen, is het handig om de juiste te kiezen voor het leveren van een maximaal koppel. Daarom zullen we in dit artikel onderscheid maken tussen de stappenmotor en de gelijkstroommotor. We zullen ook de kritische eigenschappen van servomotoren identificeren.
Stappenmotor
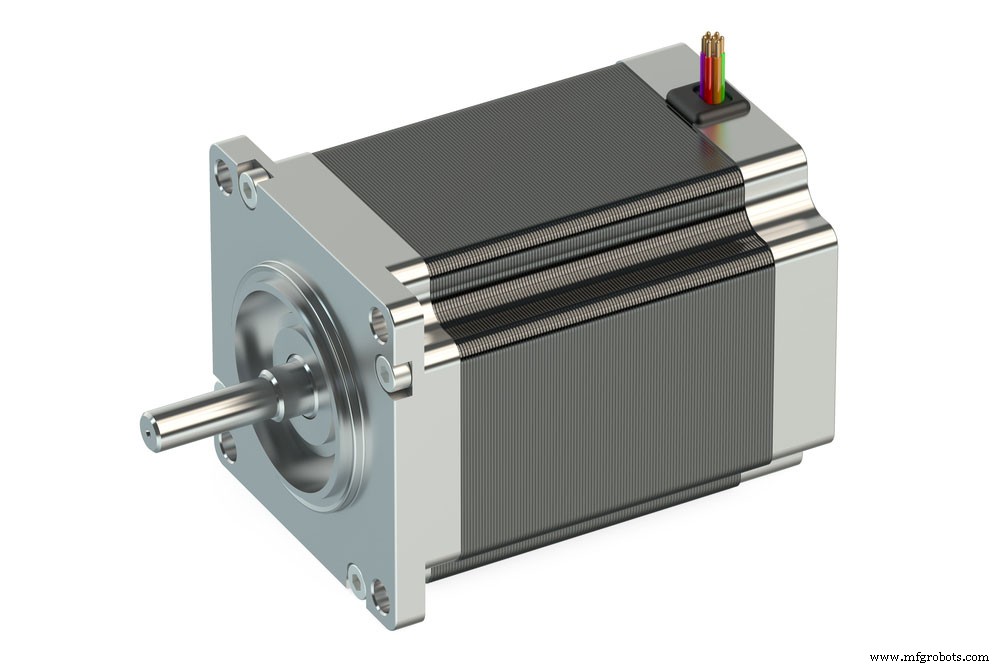
Fig 1:Een stappenmotor
Definitie
Het is in de eerste plaats een borstelloze gelijkstroommotor die in discrete stappen draait.
Ook is het met computergestuurd steppen mogelijk om uiterst nauwkeurige snelheidsregeling en positionering te realiseren. Daarom zijn stappenmotoren populair bij precisie-bewegingsbesturing.
Onderdeel
Het beschikt over meerdere getande elektromagneten rond een centrale versnelling. Deze opstelling is handig bij het bepalen van de positie. Ook gebruikt een stappenmotor met permanente magneet gelijkstroom. Desalniettemin mist het de borstels en de mechanische commutator die synoniem zijn met DC-motoren. Daarom is het een borstelloze gelijkstroommotor.
Werkingsprincipe
De motor is voorzien van een besturingssysteem dat verantwoordelijk is voor het verzenden van elektrische pulsen naar een bestuurder. Vervolgens ontcijfert de chauffeur de impulsen. Op zijn beurt zendt het een proportionele spanning terug naar de motor.
Vervolgens zal de motor in vaste hoekstappen draaien. Het is waar het de naam stappenmotor ontleent. Merk ook op dat een wisselstroom de polariteit van de spoelen regelt.
Voordelen en beperkingen
Voordelen van de stappenmotor zijn onder meer:

Fig 2:Een metalen 3D-printer
- Ten eerste zijn ze handig bij het faciliteren van nauwkeurige positioneringstoepassingen zoals in X-, Y-plotters en 3D-printers.
- Ook maken ze een nauwkeurige controle van de rotatiesnelheid mogelijk.
- Ten derde hebben ze een laag koppel bij lage snelheden.
- Ten slotte zijn ze gemakkelijk te bedienen.
Hun fundamentele beperkingen zijn onder meer
- De motoren hebben een laag rendement. Ze zullen de meeste stroom trekken als ze niet geladen zijn.
- Bovendien, wanneer de motorsnelheid hoog is, is hun koppel aanzienlijk laag in vergelijking met bij lage snelheden.
- En de meesten missen integrale feedback over de positie. Ze maken relatief veel lawaai tijdens gebruik.
- Ten slotte, wanneer ze met hoge belasting werken, kunnen ze enkele stappen overslaan.
Toepassingen
- 3D-printers
- Toepassingen voor medische beeldvorming
- Beveiligingscamera's
- Robotica
- CNC-freesmachines
Servomotor

Fig 3:3D-illustratie van een servomotor
Definitie
Het behoort tot de gelijkstroomtypes van motoren. Toch draait deze synchroonmotor niet voor langere tijd continu.
Onderdeel
In de eerste plaats vertrouwt deze motor op een feedbacksysteem om het verschil tussen de werkelijke en de gewenste snelheden te voelen. De terugkoppeling vergemakkelijkt dus de aanpassing van de uitvoer bij het corrigeren van een drift vanuit de gewenste positie. Het is handig bij het verbeteren van nauwkeurige positionering.
Er zijn twee soorten servo's, namelijk:
Continu-rotatie motorservo's
Ze kunnen continu met de klok mee of tegen de klok in draaien. Ze kunnen ook met verschillende snelheden bewegen, zoals geleid door het commandosignaal. Ze zijn dus nuttig voor een breder scala aan toepassingen dan positionele motoren.
Positieve rotatieservo's
Ze zijn handig in kleinschalige projecten om matig nauwkeurige positionering te bereiken. Ze draaien ook in een hoek van 180 graden en helpen niet bij continue rotatie en snelheidsregeling.
Werkingsprincipe

Fig 4:Een servomotor
Het ontwerp van de binnenmotor heeft een unieke opstelling van de tandwielen, handig om de hoge snelheid van de interne motoren te verminderen. Tegelijkertijd is er een aanzienlijke toename van het koppeloutput.
Daarom zijn het ontwerp en de rotatiesnelheid van de servo's absoluut noodzakelijk bij het genereren van een hoog koppel. Ook opmerkelijk is dat de servo een microcontroller heeft die handig is bij het oplossen van het foutsignaal. Deze stuursignalen helpen bij het verplaatsen van de rotor naar de eindpositie.
Stappenmotor versus DC-motor:voordelen en beperkingen
Verdiensten van servomotoren
- Ze hebben een hoog koppel wanneer ze met hoge snelheden draaien. Dit komt in de eerste plaats door hun terugkoppelingssysteem met gesloten lus, dat beter is dan het open-lussysteem van de stappenmotor.
- Ze zijn ook verkrijgbaar in een breed scala aan koppelwaarden en maten
- Ten slotte zijn ze relatief goedkoop, omdat sommige van plastic zijn gemaakt, waardoor ze ook licht van gewicht zijn.
Nadelen van servomotoren
- Positiemotoren hebben een rotatiebeperking. Ze kunnen alleen draaien in een hoek van 180 graden.
- Ze zijn ook synoniem met spiertrekkingen tijdens positiecontrole. Het is voornamelijk vanwege het feedbackmechanisme dat elke verschuiving van de beoogde positie probeert te corrigeren.
Toepassingen
- Lifttechnologie en robotica
- Telescopen en camera's
- Industriële besturingstoepassingen
Stappenmotor versus DC-motor–DC-motoren

Fig 5:Talrijke gelijkstroommotoren
Definitie
Het zijn apparaten met een elektromagnetische spoel en geleiders waarvan de interacties elektrische energie veranderen in mechanische energie. De twee veelvoorkomende typen gelijkstroommotoren zijn borstelloze motoren en borstelmotoren. Er zijn ook verschillende DC-motorgroottes.
Onderdeel
Opmerkelijk is dat de naam brushed afkomstig is van de twee stationaire metalen borstels die de motor opwinden. De andere belangrijke componenten zijn de statische stator en het roterende anker
Stappenmotor vs. DC-motor – Werkingsprincipe
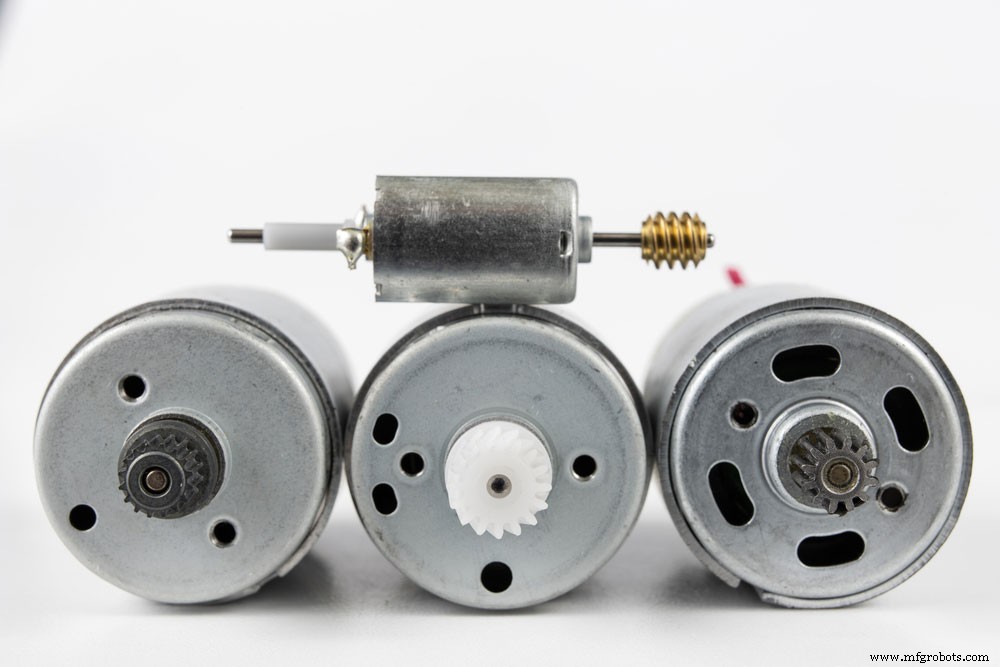
Fig 6:DC-motoren
De stator geeft het roterende magnetische veld, dat de rotatie van het anker veroorzaakt. Ook is een paar magneten handig bij het omhullen van de elektromagnetische spoelen via het omringen van de spoelen. Dus wanneer de wikkelstroom in de draad over een magnetisch veld gaat, induceert het een kracht. Dit initieert op zijn beurt de rotatie van de spoelen.
Stappenmotor versus DC-motor:voordelen en beperkingen van geborstelde DC-motoren
Voordelen
- Ze zijn gemakkelijk te bedienen, omdat je alleen maar een spanning nodig hebt.
- Ten tweede leveren ze een hoog koppel bij relatief lage snelheden. Bovendien is hun mechanische energieopwekking hoog met een efficiëntie van ongeveer 75 tot 80 %.
- Ze zijn relatief goedkoop en dus betaalbaar.
Nadelen
- Ze zijn gevoelig voor elektromagnetische ruis en fysieke ruis tijdens rotatie.
- Bovendien hebben de motoren regelmatig onderhoud nodig, aangezien de scheur- en slijtagesnelheid van de borstels aanzienlijk hoog is.
Toepassingen
- Draadloze boormachines
- Industriële toepassingen
- Trillers voor mobiele telefoons
- Handventilatoren
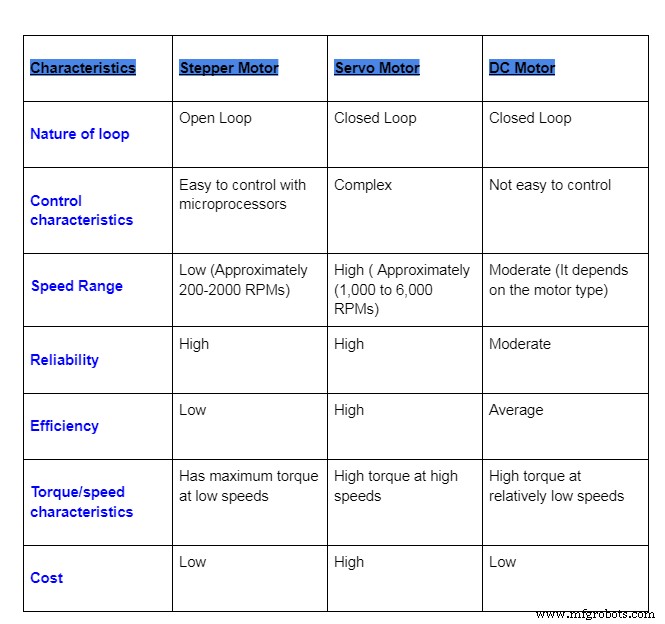
Het verschil tussen stappenmotor versus servomotor versus gelijkstroommotor
Conclusie
Kortom, deze drie motoren zijn geschikt voor verschillende functies, zoals we hebben uitgewerkt. Nu heb je alle belangrijke verschillen tussen de drie typen motoren. Als er echter nog wat meer verduidelijking zou kunnen zijn, neem dan contact met ons op.
Industriële technologie
- Potentiometer als een rheostaat
- Inductiemotor
- Eenfasige inductiemotoren
- AC-commutatormotoren
- Raspoulette-prototype
- Overmaatse elektromotoren:moeten ze worden vervangen?
- Hoe een gelijkstroommotor te controleren?
- Wat is een onderhoudsplanner?
- Wat is een lineaire motor?
- Wat is een servomotor?
- Wat is contractproductie?