


Synchrone motoren
Eenfasige synchrone motoren
Enkelfasige synchrone motoren zijn verkrijgbaar in kleine maten voor toepassingen die nauwkeurige timing vereisen, zoals tijdwaarneming, (klokken) en bandspelers. Hoewel kwartsgestuurde klokken met batterijvoeding overal verkrijgbaar zijn, heeft de op AC-lijn werkende variant een betere nauwkeurigheid op lange termijn - over een periode van maanden.
Dit is te wijten aan het feit dat exploitanten van elektriciteitscentrales doelbewust de langetermijnnauwkeurigheid van de frequentie van het AC-distributiesysteem handhaven. Als het een paar cycli achterloopt, zullen ze de verloren cycli van AC inhalen, zodat klokken geen tijd verliezen.
Grote versus kleine synchrone motoren
Boven 10 pk (10 kW) maken het hogere rendement en de toonaangevende vermogensfactor grote synchrone motoren nuttig in de industrie. Grote synchrone motoren zijn een paar procent efficiënter dan de meer gebruikelijke inductiemotoren, hoewel de synchrone motor complexer is.
Aangezien motoren en generatoren qua constructie vergelijkbaar zijn, moet het mogelijk zijn om een generator als motor te gebruiken en omgekeerd om een motor als generator te gebruiken.
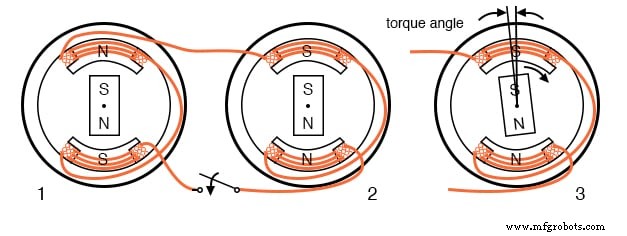
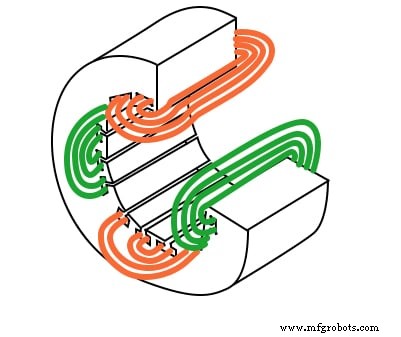
Een asynchrone motor is vergelijkbaar met een dynamo met een draaiveld. De onderstaande afbeelding toont kleine dynamo's met een permanent magnetisch draaiveld. De onderstaande afbeelding kan ofwel twee parallelle en gesynchroniseerde dynamo's zijn die worden aangedreven door mechanische energiebronnen, of een dynamo die een synchrone motor aandrijft. Of het kunnen twee motoren zijn als er een externe voedingsbron is aangesloten.
Het punt is dat in beide gevallen de rotoren met dezelfde nominale frequentie moeten draaien en in fase met elkaar moeten zijn. Dat wil zeggen, ze moeten gesynchroniseerd zijn . De procedure voor het synchroniseren van twee dynamo's is om (1) de schakelaar te openen, (2) beide dynamo's met dezelfde rotatiesnelheid aan te drijven, (3) de fase van een eenheid vooruit of achteruit te laten gaan totdat beide AC-uitgangen in fase zijn, (4) te sluiten de schakelaar voordat ze uit fase raken.
Eenmaal gesynchroniseerd, worden de dynamo's aan elkaar vergrendeld, wat een aanzienlijk koppel vereist om de ene eenheid (niet gesynchroniseerd) los te maken van de andere.
Synchrone motor loopt gelijk met de dynamo
Koppeling verantwoorden met synchrone motoren
Als er meer koppel in de draairichting wordt uitgeoefend op de rotor van een van de bovengenoemde roterende dynamo's, zal de hoek van de rotor toenemen (tegenover (3)) ten opzichte van het magnetische veld in de statorspoelen terwijl nog steeds gesynchroniseerd en de rotor levert energie aan de AC-lijn als een dynamo.
De rotor zal ook worden voortbewogen ten opzichte van de rotor in de andere dynamo. Als een belasting, zoals een rem, wordt toegepast op een van de bovenstaande eenheden, zal de hoek van de rotor achterblijven bij het statorveld zoals bij (3), waardoor energie wordt onttrokken aan de AC-lijn, zoals een motor.
Als er te veel koppel of weerstand wordt uitgeoefend, zal de rotor de maximale koppelhoek overschrijden zo ver vooruit of achterblijvend dat de synchronisatie verloren gaat. Koppel wordt alleen ontwikkeld als de synchronisatie van de motor wordt gehandhaafd.
Synchroonmotoren op snelheid brengen
In het geval van een kleine synchroonmotor in plaats van de dynamo, is het niet nodig om de uitgebreide synchronisatieprocedure voor dynamo's te doorlopen. De synchrone motor is echter niet zelfstartend en moet nog op het geschatte elektrische toerental van de dynamo worden gebracht voordat deze wordt vergrendeld (synchroniseert) met het toerental van de generator.
Als de synchrone motor eenmaal op snelheid is, blijft hij synchroon lopen met de wisselstroombron en ontwikkelt hij koppel.
Sinewave stuurt synchrone motor aan
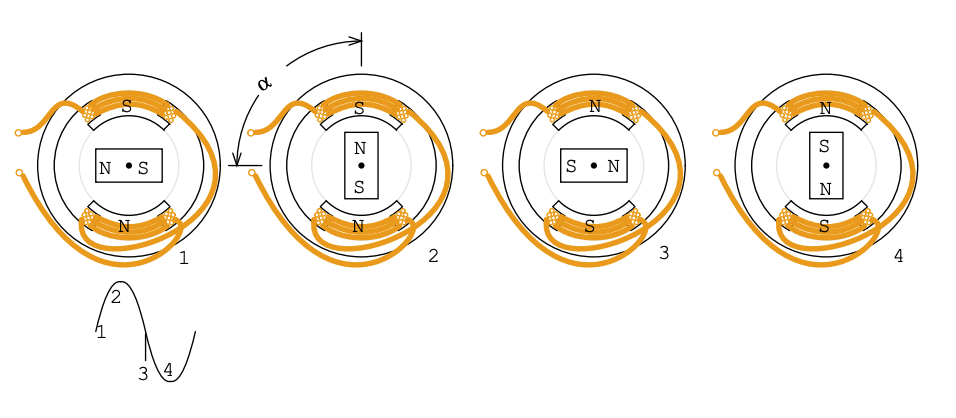
Ervan uitgaande dat de motor op synchrone snelheid is, terwijl de sinusgolf verandert in positief in figuur hierboven (1), duwt de onderste noordspoel de noordrotorpool, terwijl de bovenste zuidspoel die rotornoordpool aantrekt. Op een vergelijkbare manier wordt de zuidpool van de rotor afgestoten door de bovenste zuidspoel en aangetrokken door de lagere noordspoel.
Tegen de tijd dat de sinusgolf een piek bereikt bij (2), is het koppel dat de noordpool van de rotor omhoog houdt maximaal. Dit koppel neemt af naarmate de sinusgolf afneemt tot 0 VDC bij (3) met het koppel minimaal.
Als de sinusgolf verandert in negatief tussen (3&4), duwt de onderste zuidspoel de zuidrotorpool, terwijl hij de noordrotorpool aantrekt. Op een vergelijkbare manier wordt de noordpool van de rotor afgestoten door de bovenste noordspoel en aangetrokken door de lagere zuidspoel. Bij (4) bereikt de sinusgolf een negatieve piek met het houdkoppel weer maximaal. Als de sinusgolf verandert van negatief in 0 VDC in positief, herhaalt het proces zich voor een nieuwe sinusgolfcyclus.
Let op, de bovenstaande afbeelding illustreert de rotorpositie voor een onbelaste toestand (α=0°). In de praktijk zal het laden van de rotor ervoor zorgen dat de rotor achterloopt op de posities die worden weergegeven door hoek . Deze hoek neemt toe met belasting totdat het maximale motorkoppel is bereikt bij α=90°.
Synchronisatie en koppel gaan verloren buiten deze hoek. De stroom in de spoelen van een enkelfasige synchrone motor pulseert bij wisselende polariteit.
Als de rotorsnelheid van de permanente magneet dicht bij de frequentie van deze afwisseling ligt, wordt deze gesynchroniseerd met deze afwisseling. Omdat het spoelveld pulseert en niet roteert, is het noodzakelijk om de permanentmagneetrotor op snelheid te brengen met een hulpmotor. Dit is een kleine inductiemotor vergelijkbaar met die in het volgende gedeelte.
Toevoeging van veldpolen verlaagt de snelheid
Een 2-polige (paar N-S-polen) dynamo genereert een sinusgolf van 60 Hz wanneer deze wordt gedraaid met 3600 tpm (omwentelingen per minuut). De 3600 tpm komt overeen met 60 omwentelingen per seconde. Een vergelijkbare 2-polige synchrone motor met permanente magneet draait ook met 3600 tpm.
Een motor met een lager toerental kan worden geconstrueerd door meer poolparen toe te voegen. Een 4-polige motor zou met 1800 tpm draaien, een 12-polige motor met 600 tpm. De getoonde constructiestijl (afbeelding hierboven) is ter illustratie. Hoger rendement, meerpolige statorsynchrone motoren met een hoger koppel hebben in feite meerdere polen in de rotor.

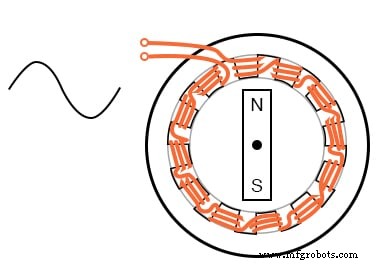
Eenwikkelige 12-polige synchrone motor
In plaats van 12-spoelen op te winden voor een 12-polige motor, wikkelt u een enkele spoel met twaalf in elkaar grijpende stalen paalstukken zoals weergegeven in de bovenstaande afbeelding. Hoewel de polariteit van de spoel afwisselt vanwege de toegepaste AC, neem aan dat de bovenkant tijdelijk naar het noorden is, de onderkant naar het zuiden.
Poolstukken leiden de zuidelijke flux van de bodem en buiten de spoel naar de top. Deze 6-zuiden zijn doorschoten met 6-noordelijke lipjes die omhoog zijn gebogen vanaf de bovenkant van het stalen poolstuk van de spoel. Een rotorstaaf met permanente magneet zal dus 6-polige paren tegenkomen die overeenkomen met 6-cycli van AC in één fysieke rotatie van de staafmagneet.
De rotatiesnelheid zal 1/6 van de elektrische snelheid van de AC zijn. Rotorsnelheid zal 1/6 zijn van die ervaren met een 2-polige synchroonmotor. Voorbeeld:60 Hz zou een 2-polige motor draaien met 3600 tpm, of 600 tpm voor een 12-polige motor.
Herdrukt met toestemming van Westclox History op www.clockHistory.com
De stator (Figuur hierboven) toont een 12-polige Westclox synchrone klokmotor. De constructie is vergelijkbaar met de vorige afbeelding met een enkele spoel. De constructie met één spoel is economisch voor motoren met een laag koppel. Deze motor met 600 tpm drijft reductietandwielen aan die wijzers bewegen.
V: Als de Westclox-motor met 600 tpm zou draaien vanaf een stroombron van 50 Hz, hoeveel polen zouden er dan nodig zijn?
A: Een 10-polige motor zou 5 paar N-S-polen hebben. Het zou roteren met 50/5 =10 omwentelingen per seconde of 600 rpm (10 s-1 x 60 s/minuut).

Herdrukt met toestemming van Westclox History op www.clockHistory.com
De rotor (Figuur hierboven) bestaat uit een permanente magneetstaaf en een stalen inductiemotorbeker. De synchrone motorstang die binnen de paallipjes draait, houdt de tijd nauwkeurig bij. De inductiemotorbeker buiten de staafmagneet past buiten en over de lipjes voor zelfstart. Ooit werden niet-zelfstartende motoren zonder de inductiemotorbeker vervaardigd.
3-fasen synchrone motoren
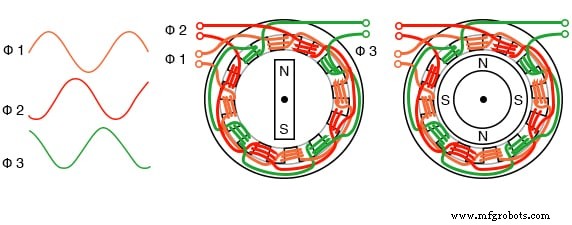
Een 3-fase synchroonmotor zoals weergegeven in onderstaande figuur wekt een elektrisch draaiveld op in de stator. Dergelijke motoren zijn niet zelfstartend als ze worden gestart vanaf een stroombron met vaste frequentie, zoals 50 of 60 Hz, zoals die in een industriële omgeving wordt aangetroffen.
Verder is de rotor geen permanente magneet voor de in de industrie gebruikte multi-pk (multi-kilowatt) motoren, maar een elektromagneet. Grote industriële synchrone motoren zijn efficiënter dan inductiemotoren. Ze worden gebruikt wanneer een constante snelheid vereist is. Met een leidende arbeidsfactor kunnen ze de AC-lijn corrigeren voor een achterblijvende arbeidsfactor.
De drie fasen van statorexcitatie worden vectorieel opgeteld om een enkel resulterend magnetisch veld te produceren dat f/2n keer per seconde roteert, waarbij f de hoogspanningslijnfrequentie is, 50 of 60 Hz voor industriële hoogspanningsmotoren. Het aantal polen is n. Voor rotorsnelheid in tpm, vermenigvuldig met 60.
S =f120/n waarbij:S =rotorsnelheid in rpm f =AC-lijnfrequentie n =aantal polen per fase
De 3-fase 4-polige (per fase) synchrone motor zal draaien met 1800 rpm met 60 Hz vermogen of 1500 rpm met 50 Hz vermogen. Als de spoelen één voor één worden bekrachtigd in de volgorde φ-1, φ-2, φ-3, moet de rotor op zijn beurt naar de corresponderende polen wijzen.
Omdat de sinusgolven elkaar daadwerkelijk overlappen, zal het resulterende veld niet in stappen maar vloeiend roteren. Wanneer bijvoorbeeld de φ-1 en φ-2 sinusgolven samenvallen, zal het veld zich op een piek bevinden die tussen deze polen wijst. De getoonde staafmagneetrotor is alleen geschikt voor kleine motoren.
De rotor met meerdere magneetpolen (rechtsonder) wordt gebruikt in elke efficiënte motor die een aanzienlijke belasting aandrijft. Dit zijn sleepringgevoede elektromagneten in grote industriële motoren. Grote industriële synchrone motoren starten zichzelf op door ingebedde eekhoornkooigeleiders in het anker, die als inductiemotor werken.
Het elektromagnetische anker wordt pas bekrachtigd nadat de rotor op bijna synchrone snelheid is gebracht.
Driefasige, 4-polige synchrone motor
Kleine meerfasige synchrone motoren
Kleine meerfasige synchrone motoren kunnen worden gestart door de aandrijffrequentie van nul naar de uiteindelijke bedrijfsfrequentie te laten lopen. De meerfasige stuursignalen worden gegenereerd door elektronische schakelingen en zullen blokgolven zijn in alle, behalve de meest veeleisende toepassingen.
Dergelijke motoren staan bekend als borstelloze gelijkstroommotoren. Echte synchrone motoren worden aangedreven door sinusgolfvormen. Twee- of driefasige aandrijving kan worden gebruikt door het juiste aantal wikkelingen in de stator te leveren. Alleen 3-fase wordt hierboven getoond.
Elektronische synchrone motor
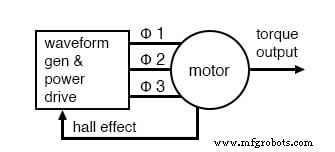
Het blokschema toont de aandrijfelektronica geassocieerd met een laagspanning (12 V DC) synchrone motor. Deze motoren hebben een positiesensor geïntegreerd in de motor, die een signaal op laag niveau levert met een frequentie die evenredig is aan de rotatiesnelheid van de motor.
De positiesensor kan zo simpel zijn als magnetische veldsensoren in vaste toestand, zoals Hall-effect apparaten die commutatie (ankerstroomrichting) timing leveren aan de aandrijfelektronica. De positiesensor kan een hoeksensor met hoge resolutie zijn, zoals een resolver, een inductosyn (magnetische encoder) of een optische encoder.
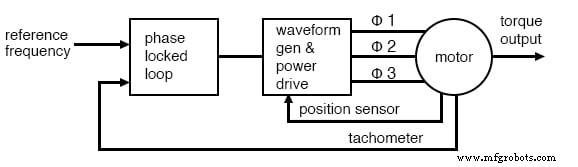
Als de constante en nauwkeurige rotatiesnelheid vereist is, (zoals voor een schijfstation) een toerenteller en fasevergrendelde lus kan worden opgenomen (figuur hieronder). Dit toerentellersignaal, een pulstrein die evenredig is met de motorsnelheid, wordt teruggevoerd naar een fasevergrendelde lus, die de toerentellerfrequentie en fase vergelijkt met een stabiele referentiefrequentiebron zoals een kristaloscillator.
Phase-locked loop regelt synchrone motorsnelheid
Borstelloze gelijkstroommotor
Een motor aangedreven door blokvormige stroomgolven, zoals geleverd door eenvoudige hall-effectsensoren, staat bekend als een borstelloze gelijkstroommotor . Dit type motor heeft een hoger rimpelkoppel variatie door een asomwenteling dan een sinusgolf wordt aangedreven motor. Voor veel toepassingen is dit geen probleem. In deze sectie zijn we echter vooral geïnteresseerd in synchrone motoren.
Motorrimpelkoppel en mechanisch analoog
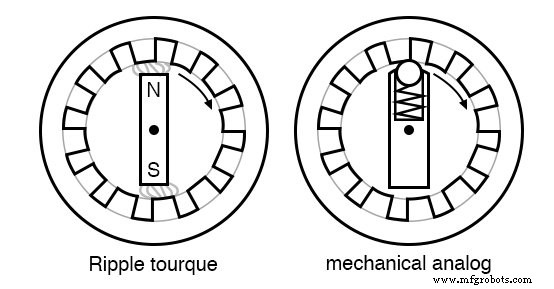
Rimpelkoppel, of cogging, wordt veroorzaakt door de magnetische aantrekkingskracht van de rotorpolen op de statorpoolstukken. (Figuur hierboven) Merk op dat er geen statorspoelen zijn. De PM-rotor kan met de hand worden gedraaid, maar zal worden aangetrokken door de poolstukken wanneer deze in de buurt zijn.
Dit is analoog aan de mechanische situatie. Zou het rimpelkoppel een probleem zijn voor een motor die in een cassettespeler wordt gebruikt? Ja, we willen niet dat de motor afwisselend snel en langzaam gaat terwijl hij de geluidsband langs een afspeelkop voor de band beweegt. Zou het rimpelkoppel een probleem zijn voor een ventilatormotor? Nee.
Winkels verdeeld in een riem produceren een meer sinusoïdaal veld
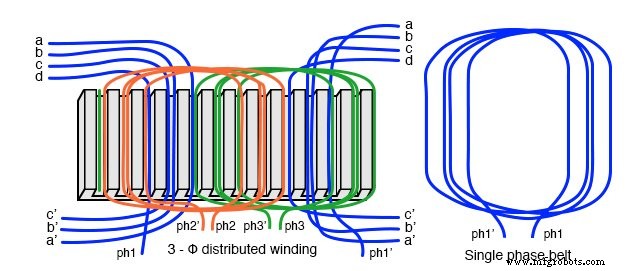
Als een motor wordt aangedreven door sinusgolven van stroom synchroon met de motor-back-emf, wordt deze geclassificeerd als een synchrone AC-motor, ongeacht of de aandrijfgolfvormen met elektronische middelen worden gegenereerd. Een synchrone motor genereert een sinusvormige terug emf als het magnetische veld van de stator een sinusvormige verdeling heeft.
Het zal meer sinusvormig zijn als poolwikkelingen in een riem over veel sleuven worden verdeeld in plaats van geconcentreerd op één grote pool (zoals getekend in de meeste van onze vereenvoudigde illustraties). Deze opstelling annuleert veel van de oneven harmonischen van het statorveld.
Slots met minder wikkelingen aan de rand van de fasewikkeling kunnen de ruimte delen met andere fasen. Wikkelbanden kunnen een alternatieve concentrische vorm aannemen, zoals weergegeven in onderstaande afbeelding.
Concentrische riemen
Voor een 2-fasenmotor, aangedreven door een sinusgolf, is het koppel constant gedurende een omwenteling door de trigonometrische identiteit:
sin2θ + cos2θ =1
De generatie en synchronisatie van de aandrijfgolfvorm vereisen een nauwkeurigere indicatie van de rotorpositie dan die wordt geboden door de hall-effectsensoren die worden gebruikt in borstelloze gelijkstroommotoren. Een oplosser , of optische of magnetische encoder , biedt resolutie van honderden tot duizenden delen (pulsen) per omwenteling.
Een resolver levert analoge hoekpositiesignalen in de vorm van signalen die evenredig zijn met de sinus en cosinus van de ashoek. Encoders bieden een digitale hoekpositie-indicatie in serieel of parallel formaat.
De sinusgolfaandrijving is mogelijk afkomstig van een PWM, Pulse Width Modulator , een zeer efficiënte methode om een sinusgolf te benaderen met een digitale golfvorm. Elke fase vereist aandrijfelektronica voor deze golfvorm die in fase verschoven is met de juiste hoeveelheid per fase.
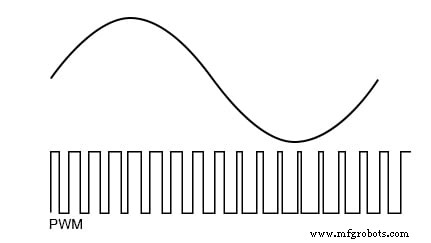
PWM benadert een sinusgolf
Voordelen van synchrone motor
Het synchrone motorrendement is hoger dan dat van inductiemotoren. Een synchrone motor kan ook kleiner zijn, vooral als er in de rotor permanente magneten met hoge energie worden gebruikt. De komst van moderne solid-state elektronica maakt het mogelijk om deze motoren met variabele snelheid aan te drijven.
Inductiemotoren worden meestal gebruikt in spoorwegtractie. Een kleine synchrone motor, die in een aandrijfwiel wordt gemonteerd, maakt het echter aantrekkelijk voor dergelijke toepassingen. De supergeleidende hoge temperatuur versie van deze motor is een vijfde tot een derde van het gewicht van een koperen motor.
De grootste experimentele supergeleidende synchrone motor kan een schip van de marine-destroyerklasse aandrijven. In al deze toepassingen is de elektronische aandrijving met variabele snelheid essentieel. De frequentieregelaar moet ook de aandrijfspanning bij lage snelheid verlagen vanwege verminderde inductieve reactantie bij een lagere frequentie.
Om een maximaal koppel te ontwikkelen, moet de rotor 90° achterlopen op de richting van het statorveld. Meer, het verliest synchronisatie. Veel minder resulteert in een lager koppel. De positie van de rotor moet dus nauwkeurig bekend zijn. En de positie van de rotor ten opzichte van het statorveld moet worden berekend en gecontroleerd.
Dit type regeling staat bekend als een vectorfaseregeling . Het is geïmplementeerd met een snelle microprocessor die een pulsbreedtemodulator voor de statorfasen aanstuurt. De stator van een synchrone motor is dezelfde als die van de meer populaire inductiemotor.
Als gevolg hiervan is de elektronische snelheidsregeling van industriële kwaliteit die wordt gebruikt met inductiemotoren ook toepasbaar op grote industriële synchrone motoren. Als de rotor en stator van een conventionele roterende synchrone motor worden afgerold, ontstaat een synchrone lineaire motor.
Dit type motor wordt toegepast voor nauwkeurige lineaire positionering met hoge snelheid.
GERELATEERD WERKBLAD:
- Werkblad Wisselstroommotortheorie
Industriële technologie
- Synchrone tellers
- Eenfasige inductiemotoren
- AC-commutatormotoren
- Problemen met wondrotormotoren oplossen
- Tip van elektromotoren:minimaliseer je starts
- Technische tip:motoren
- Voordelen van vloeistofgekoelde motoren
- 7 stappen om te zorgen voor een beter onderhoud van elektrische motoren
- DC vs. AC elektromotoren:wat zijn hun verschillen?
- BLDC Motors &Automatisering
- Een inleiding tot de BLDC-motor