


Onderzoekers ontwikkelen vingertoppen van robots voor het grijpen en loslaten van objecten in droge en natte omstandigheden
Een team van onderzoekers van Kanazawa University heeft een robotbesturingssysteem - of vingertoppen - ontwikkeld voor het grijpen en loslaten van objecten in droge en natte omstandigheden.
De onderzoekers zeggen dat de studie in staat was om te verifiëren dat "het vastpakken van objecten door zachte vingertoppen met vloeistof en hoge wrijving controleerbaar was door een geschikt smeermiddel aan te brengen".
Ze voegden er echter aan toe dat het nodig was om meer experimenten te doen onder verschillende omstandigheden om de huidige besturingstechnologie toe te passen op productieomgevingen.
Desalniettemin zal dit onderzoek naar verwachting een stap voorwaarts zijn voor het realiseren van werkautomatisering van bijvoorbeeld het vastpakken en loslaten van objecten in een nauwe ruimte.
Industriële robots worden nu veel gebruikt en zijn onmisbaar in de autoproductie en op andere gebieden. Conventionele robothanden zijn geschikt om harde voorwerpen met een vaste vorm vast te pakken, terwijl het niet gemakkelijk is om ingewikkelde voorwerpen vast te pakken of zachte voorwerpen voorzichtig vast te pakken.
Ook is het nodig om onder verschillende omstandigheden te reageren op fysieke kenmerken van objecten zoals oppervlaktekenmerken:droog, nat, etc.
Een vingertop met een zacht oppervlak van een robothand is vervormbaar en kan een object met een gecompliceerde vorm vrij gemakkelijk vastpakken, aangezien het contactgebied kan worden vergroot door oppervlaktevervorming als reactie op de objectvorm.
Vingertoppen met een zacht oppervlak zijn zeer effectief in het grijpen van zachte voorwerpen; zelfs tofu kan worden gegrepen.
Over het algemeen is de oppervlaktewrijving van zacht materiaal echter hoog, wat het lossen bemoeilijkt. Het is ook moeilijk om objecten in de gewenste posities los te laten, vooral in gevallen waar de werkruimte smal is.
De onderzoeksgroep werd geleid door professor Tetsuyou Watanabe van Kanazawa University en heeft onderzoek gedaan naar besturingstechnologie voor het grijpen van objecten met de vingertoppen van robothanden.
In de huidige studie wilde de groep een wrijvingscontrolesysteem ontwikkelen.
De groep gebruikte de zachte vingertoppen van een robothand om objecten vast te pakken; het vrijgeven werd bereikt door het aanbrengen (injecteren) van een smeermiddel.
In deze studie werd absolute ethanol (>99,5%) gebruikt als smeermiddel, omdat ethanol chemisch veilig en gemakkelijk te drogen is en omdat de oppervlaktespanning laag is.
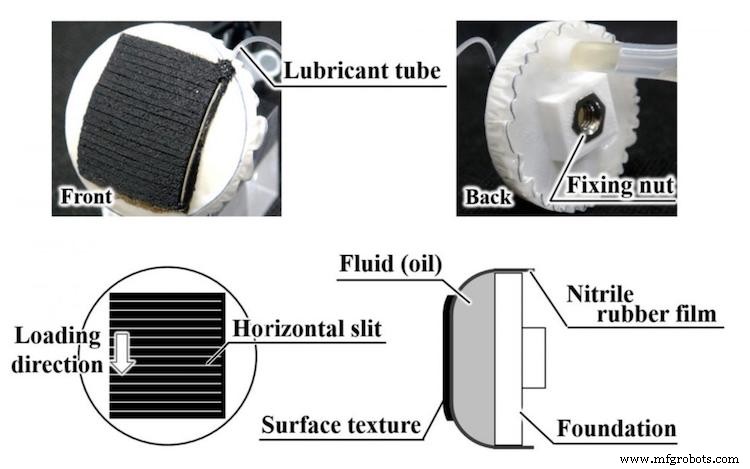
Zoals te zien is in figuur 1, werd een nitrilrubberfilm aan de zijkanten van de vingertopbasis gehecht om een ruimte te creëren voor het vullen met kettingzaagolie om een "vloeibare vingertop" te maken.
Vervolgens werd een siliconen "textuur" gebonden om de rubberfilm te coaten; het materiaal van de "textuur" was een siliconenkit met sleuven, waarvan het interval 1,5 mm was, loodrecht op de belastingsrichting.
De sleuven zijn aangebracht voor een grote wrijving onder een water-natte toestand en voor het verspreiden van smeermiddel.
Met deze vloeibare vingertop werden voorwerpen van verschillende materialen die voor keukengerei werden gebruikt, vastgepakt en werd geverifieerd dat bij het aanbrengen van het smeermiddel de wrijving inderdaad werd verminderd.
De wrijving werd verminderd onder zowel droge als natte omstandigheden, terwijl een dergelijk smerend effect niet werd waargenomen onder olieachtige omstandigheden.
Vervolgens werd een simulatie van een doosverpakkingstaak uitgevoerd. Een papieren doos werd met twee vloeiende vingertoppen van beide kanten vastgepakt.
De hierboven beschreven "textuur" werd aan elke vloeibare vingertop gehecht. Stabiel grijpen werd bevestigd door een gewicht op de papieren doos te plaatsen.
Na verwijdering van het gewicht werd smeermiddel in beide vloeibare vingertoppen geïnjecteerd, waardoor de papieren doos in een vrij korte tijd (minder dan 2,5 s) naar beneden zakte, zodat de verpakkingstaak van de papieren doos was voltooid.
Zoals hier wordt getoond, werd een "textuur" van hoge wrijving aan de vloeibare vingertop gehecht en het injecteren van een smeermiddel (hier absolute ethanol) verminderde de wrijving.
Daarom werd het loslaten en plaatsen van een object op een gewenste positie bereikt door de wrijving te beheersen zonder de vingertoppen te bewegen.
Automatisering Besturingssysteem
- Een schakelbord ontwerpen voor een visserijtrawler
- 3D-printen van aangepaste brandstofinjectorgrijpers voor een pick-and-place-robot
- Essentium en Lehvoss werken samen om materialen voor additieve productie te ontwikkelen
- DSM en Nedcam ontwikkelen nieuwe toepassingen voor grootformaat 3D-printen
- Sepro lanceert apps om robotsoftware te verbeteren
- Automatisering voor IML en Stack Moulds
- ‘Artistieke’ robot bij NPE
- 3 voordelen van robotsimulatie voor fabrikanten en andere robotgebruikers
- Nieuws over robotica en automatisering is goed voor ABB, zegt CEO
- Fanuc en Plus One Robotics ontwikkelen automatiseringsoplossingen voor e-commerce fulfilment
- AV&R en APN werken samen om robotica voor luchtvaartproductie te ontwikkelen