


Uw processen automatiseren door bin Picking - Hier is waar u op moet letten
Waarom lees dit: Binpicking is al jaren een van de meest uitdagende processen in de automatisering. Hoewel de technologie uw productie op verschillende manieren kan optimaliseren, kunnen sommige taken nog steeds te complex zijn om te verwerken. Dit artikel toont de processen die geautomatiseerd kunnen worden door bin-picking, de mogelijke uitdagingen en hun oplossingen.
Wat is bin-picking?
Het doel van bin-picking is om vergelijkbare objecten op te pakken die willekeurig uit een bak zijn geplaatst en georiënteerd, met behulp van een vision-systeem, een robot en een grijper. Het vision-systeem voert meestal een 3D-scan uit van het object en geeft zijn puntenwolk (set van punten in de ruimte die een object vormen) en herkent het dus.
Vervolgens wordt de robot in de bak gereden, pakt het object op, gaat uit de bak en naar het plaatsingsdoel, meestal een doos of een ander apparaat.
Uitdagingen en oplossingen voor het robotica-gedeelte van het bin-pickingproces
Sommige items zijn moeilijk te bereiken
Een groot probleem bij het verzamelen van bakken is het onvermogen van de robot om alle stukken uit de bak te halen. Het oppakken van 80 tot 85 procent daarvan is beheersbaar, aangezien het vision-systeem de robot opdracht geeft om de objecten op te pakken die gemakkelijk te grijpen zijn (bijvoorbeeld degene die bovenop zitten).
Het moeilijke is om de laatste items te pakken die met elkaar verweven zijn of in een hoek van de prullenbak zitten. Dit kan op twee manieren worden opgelost. De eerste houdt in dat de prullenbak opnieuw moet worden ontworpen, waardoor deze een meer praktische vorm krijgt. Een conische vorm zou bijvoorbeeld alle onderdelen altijd in het midden houden.
Een tweede oplossing zou zijn om de bak te schudden (bijvoorbeeld automatisch met behulp van een motor) zodat de posities en oriëntaties van de onderdelen worden herschikt en niet meer worden gemengd. De camera zou ze dan gemakkelijker kunnen identificeren.
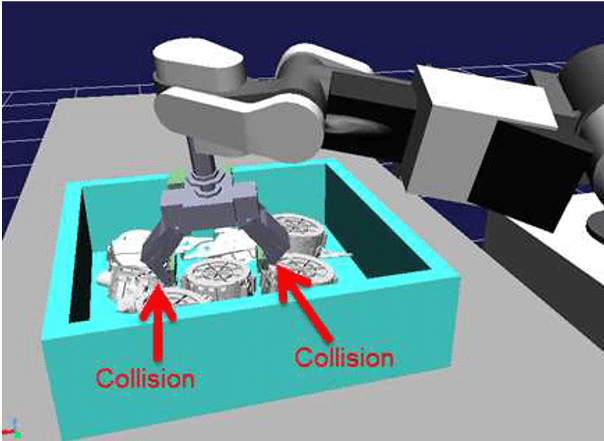
Grijpers kunnen de verzamelde items beschadigen
Een ander probleem is de kans op een botsing van de grijper met de rest van de objecten terwijl je er een probeert te pakken. De pickstrategie moet nauwkeurig zijn om te voorkomen dat de resterende onderdelen (vooral de kwetsbare) worden beschadigd.
Een oplossing hiervoor is een nauwkeurig algoritme voor padplanning met het vermijden van obstakels. Padplanning in robotica is het proces van het vinden van het optimale continue pad van punt A naar punt B. Als het vermijden van obstakels ook is inbegrepen, wordt dezelfde taak uitgevoerd zonder obstakels te raken.
Er kunnen gevallen zijn waarin de voorwerpen in de prullenbak een andere vorm of aard hebben (bijvoorbeeld appels en sinaasappels). In dit geval kan een zachte grijper of een vacuümgrijper met zuignappen worden gebruikt, zodat deze zich aan elke maat en vorm aanpast.

Uitdagingen en oplossingen voor het vision-gedeelte van het bin-pickingproces
Het vision-systeem van een bin-picking-oplossing kan 2D- of 3D-camera's bevatten. Het spreekt voor zich dat 3D-camera's (dubbele camera's die een 3D-beeld creëren) duurder zijn, maar ze zijn effectiever. Daarnaast kunnen 3D-laserscanners worden gebruikt die de bovengenoemde puntenwolken produceren.
Bliksem, occlusie en randdetectie kunnen het proces bemoeilijken
Terugkerende problemen met het gezichtsvermogen zijn onder meer verlichting, occlusie en randdetectie. Ze zijn van toepassing op zowel 2D- als 3D-zichtsystemen.
Verlichting betekent dat schaduwen van elk object naar de rest worden geworpen, zodat de camera ze moeilijk kan detecteren. Het kan worden opgelost door de scène te voorzien van extra verlichting die naast de camera of op de pols van de robot kan worden bevestigd.
Occlusie vindt plaats wanneer het object niet volledig zichtbaar is voor de camera omdat er een ander object bovenop wordt geplaatst. Nogmaals, het schudden van de bak kan in dit geval nuttig zijn, zodat het object gemakkelijker kan worden gedetecteerd. wordt gemakkelijker gedetecteerd.
Randdetectie is de uitdaging om de omtrek (randen) van een object te bepalen. Het wordt nog moeilijker wanneer een groot aantal objecten naast elkaar wordt geplaatst, zoals bij bin picking. De oplossing voor dit probleem hangt af van de software en de gebruikte methoden.
Hoe ziet u mogelijkheden voor het automatiseren van uw processen door bin-picking
Als u overweegt om processen in uw bedrijf te automatiseren met behulp van bin-picking, kunnen de volgende punten wijzen op enig potentieel voor automatisering:
- Hoog aantal kleine onderdelen: Als het systeem goed is ingesteld, kan de robot die onderdelen (zoals schroeven of ringen) snel en robuust oppakken.
- Niet-geordende artikelen: Processen waarbij het niet mogelijk is om artikelen geordend te ontvangen van een vorig proces of onderleverancier. In de meeste gevallen is het effectiever om artikelen op een gestructureerde manier te laten bezorgen, en zo bin-picking volledig te vermijden.
- Delen met een mat oppervlak. Als onderdelen sterk reflecterend zijn, zoals bewerkte metalen onderdelen, kunnen er problemen zijn met bliksem. De meeste camerasystemen zullen moeite hebben om de items voor bin-picking te vinden.
- Een proces waarbij de cyclustijd meer dan ongeveer 10 seconden is , en bij voorkeur met een buffer voor gepickte onderdelen. Het duurt even voordat een bin-pickingsysteem elk item heeft gevonden en gepickt.
Conclusie
Voor de ontwikkelaars is bin picking echt de heilige graal. Voor de klanten is dat misschien niet zo. Gewoonlijk kan het een goed idee zijn om het gebruik van bin-picking-oplossingen te vermijden, simpelweg door ervoor te zorgen dat het leveringsformaat van artikelen ordelijk is, in plaats van willekeurig in een bak.
Dit brengt meestal wat kosten met zich mee, maar het is vaak goedkoper en zorgt voor een snellere verwerking dan het gebruik van bin-picking.
In sommige gevallen is dit echter niet mogelijk, of erg duur. In die gevallen is het fijn om bin-picking te kunnen gebruiken.
Als een proces van u alle vier de voorgaande punten aanvinkt, is het wellicht zeer geschikt voor bin-picking. Houd er bij het vinden van de te gebruiken oplossing rekening mee dat sommige oplossingen nog erg experimenteel zijn, terwijl andere jaren de tijd hebben gehad om te rijpen en hun robuustheid te bewijzen.
Industriële robot
- Waar u op moet letten in een vooraf ontworpen robot-werkcel
- Uw apparatuur opnieuw ontwerpen voor verbeterde productiviteit
- Waar u op moet letten bij een urethaanproductiepartner?
- Wat is geschikt voor uw lading? Wisselstroommotor versus gelijkstroommotor
- Waar u op moet letten bij een reparatiebedrijf voor bouwmachines
- Waar u op moet letten bij een PCB-fabrikant:deel 2
- Waar moet u op letten bij een gebruikte kantpers?
- Waar moet je op letten bij het kopen van een ijzerbewerker?
- Waar u op moet letten bij een partner voor productieapparatuur
- Waar u op moet letten bij een machinemakelaar
- Waar moet je op letten bij een metaalleverancier?