


Aan de slag met IMU (6 DOF) bewegingssensor
Componenten en benodigdheden
 |
| × | 1 | |||
 |
| × | 1 |
Over dit project
Vandaag zullen we de best beschikbare IMU-sensor (Inertia Measurement Unit) bestuderen en ontdekken hoe deze kan worden gekoppeld aan een Arduino. Later in onze volgende tutorial zullen we proberen de bewegingsdetectie in 3D te visualiseren.
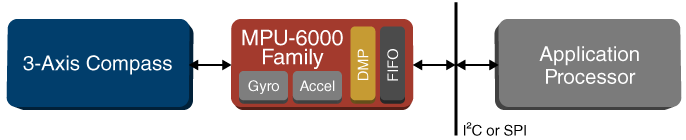
De IMU-sensormodule die we gaan gebruiken, is gecentreerd rond een MPU-6050-sensor.
De MPU-6050-apparaten combineren een 3-assige gyroscoop en een 3-assige versnellingsmeter op dezelfde siliciumchip, samen met een ingebouwde Digital Motion Processor™ (DMP™) , die complexe 6-assige MotionFusion-algoritmen verwerkt.
Deze MotionTracking-apparaten zijn ontworpen voor de lage stroomverbruik, lage kosten en hoge prestatie-eisen van smartphones, tablets en draagbare sensoren.
Dingen die je nodig hebt:
HARDWARE:
1) Arduino UNO
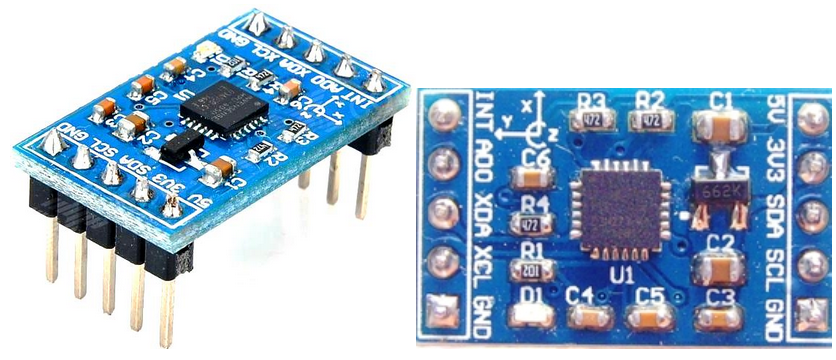
2) MPU 6050-sensor
3) Draden aansluiten
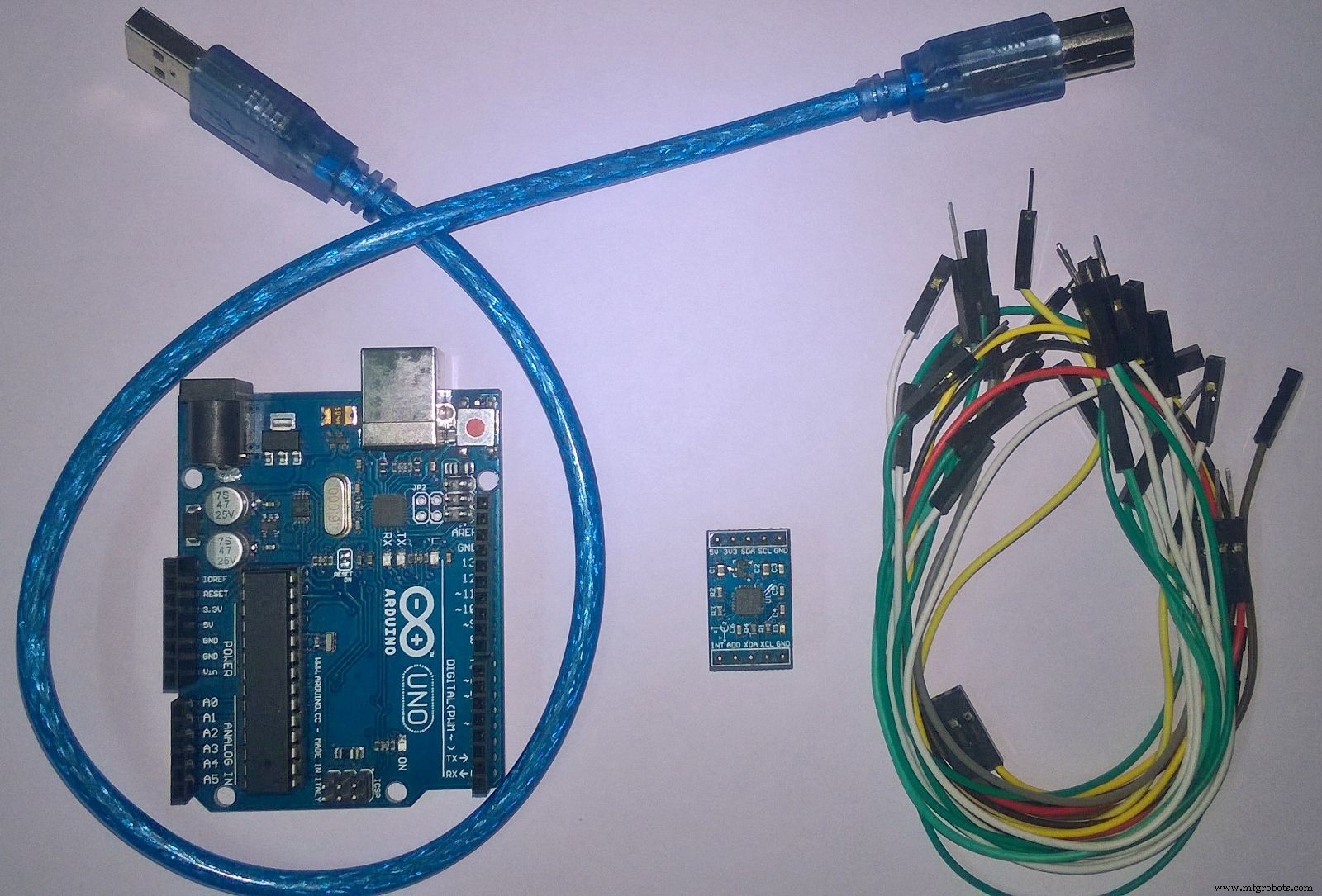
SOFTWARE: Arduino IDE
Communicatieprotocol: Deze IMU-sensor communiceert met de Arduino via het I2C-busprotocol.
Je kunt afzonderlijk aan versnellingsmeters en gyroscopen werken, maar ze zijn niet zo nauwkeurig als deze gecombineerde module.
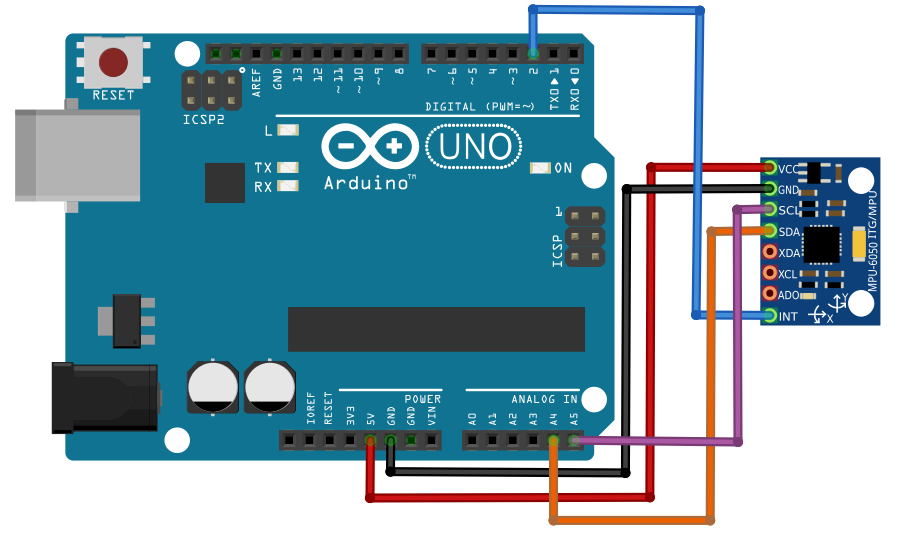
Laten we nu verder gaan met het bedradingsschema en het verbindingsprofiel.
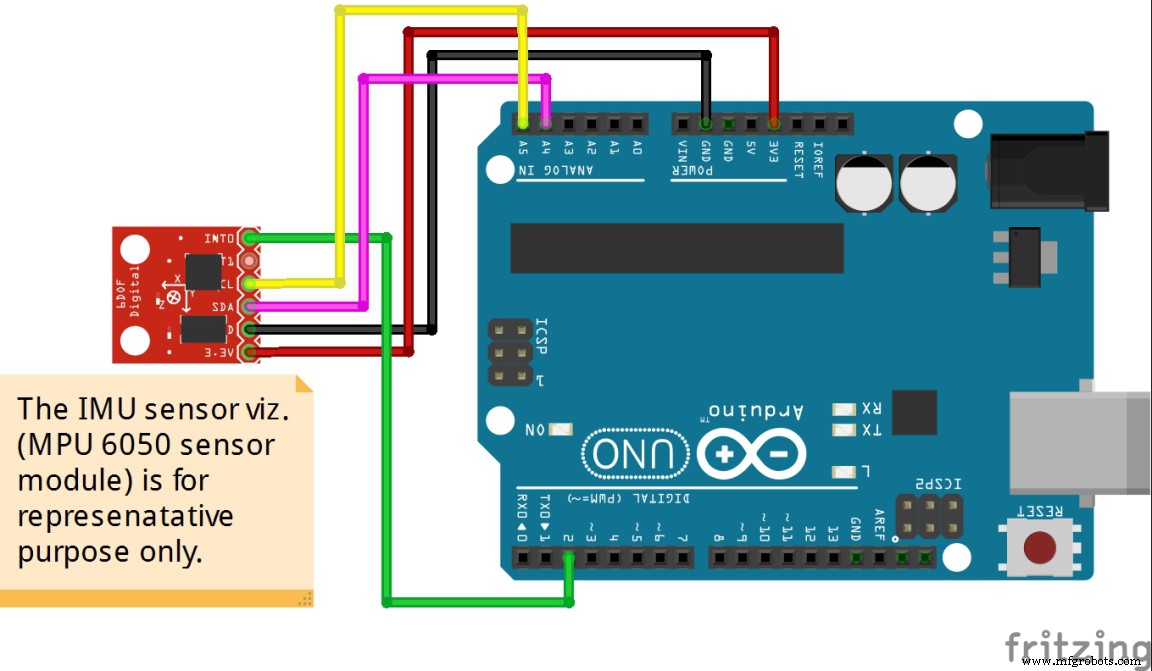
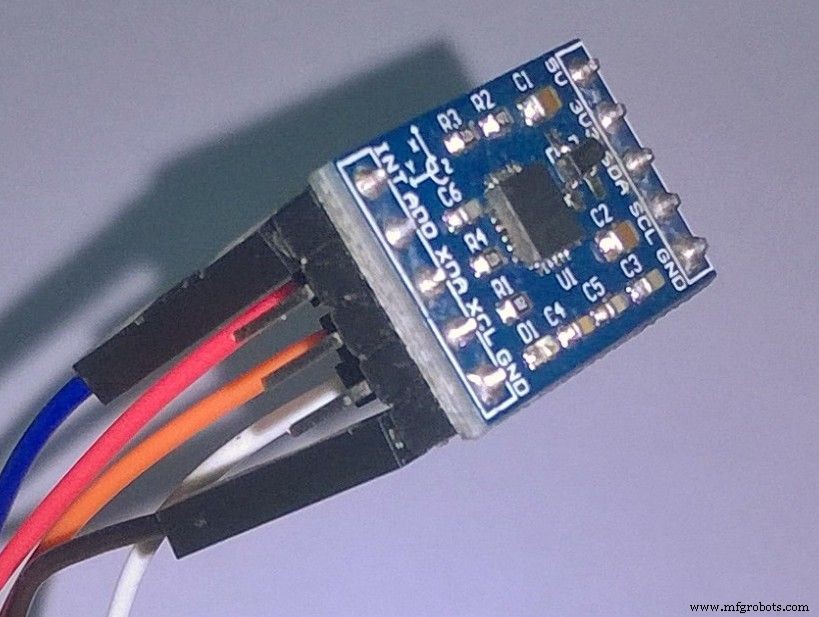
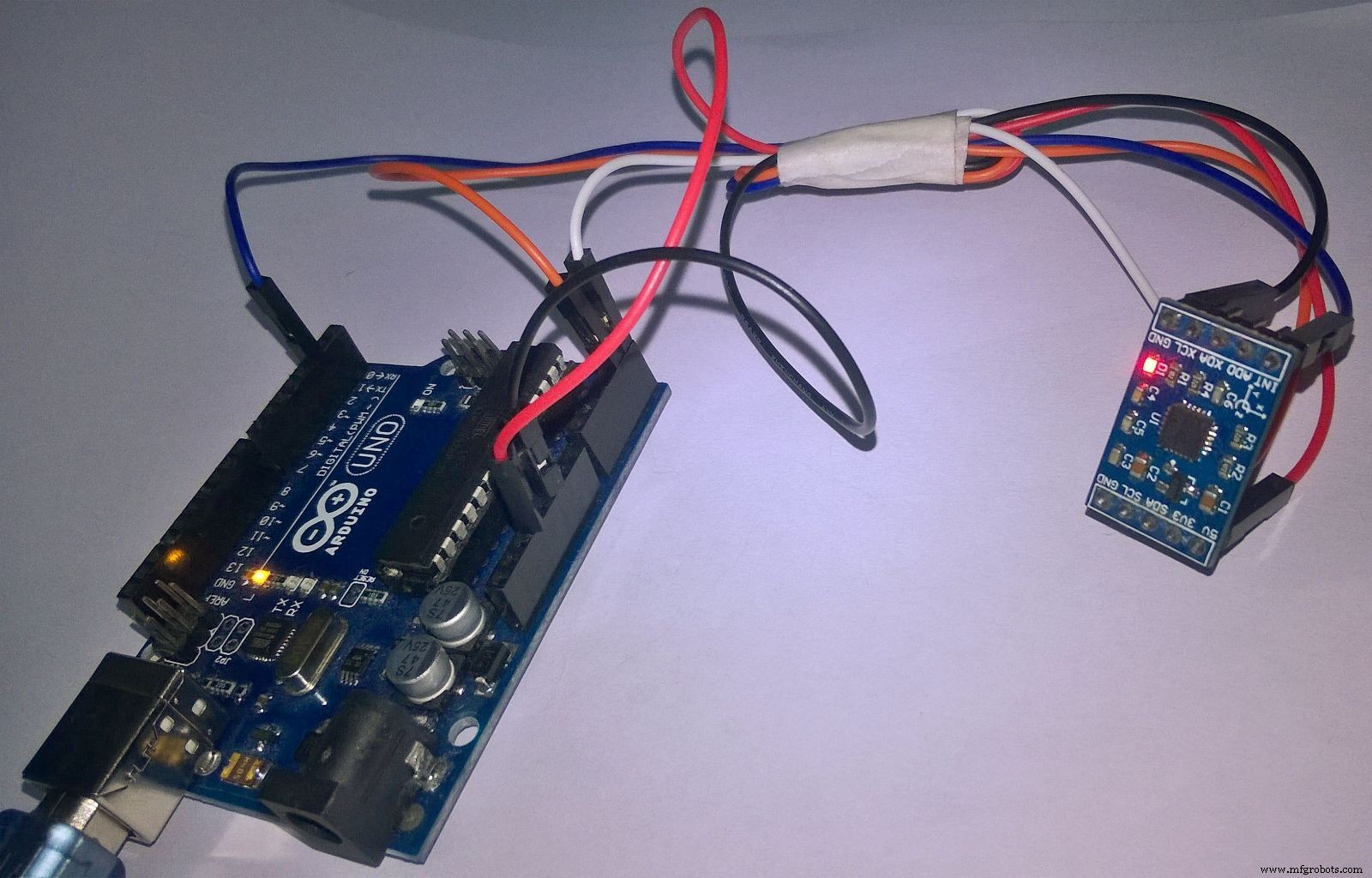
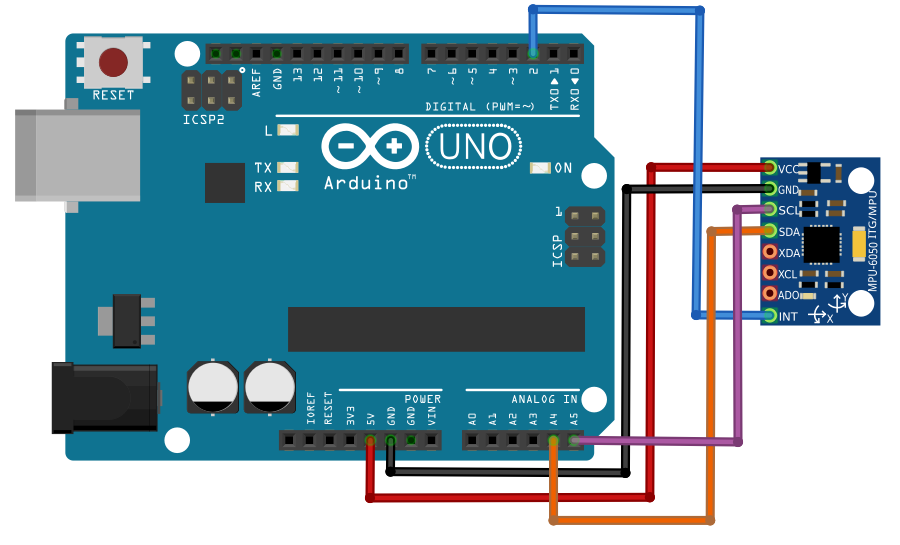
Raadpleeg een van deze 2 afbeeldingen hieronder voor aansluiting.
Als u problemen ondervindt met de bovenstaande cijfers, raak dan niet in paniek.....
Ga door het verbindingspinprofiel hieronder:
Sluit 5V [IMU MPU-6050] aan aan VCC [ARDUINO]
Sluit SDA [IMU MPU-6050] aan op Analog IN (A4) [ARDUINO]
Sluit SCL [IMU MPU-6050] aan op Analog IN (A5) [ARDUINO]
Verbind GND [IMU MPU-6050] met GND [ARDUINO]
Sluit INTPIN [IMU MPU-6050] aan aan pin 2 (digitale PWM-pin) [ARDUINO]
Hier, als uw MPU 6050-module een 5V-pin heeft, dan kunt u deze aansluiten op de 5V-pin van uw Arduino. Anders moet u hem aansluiten op de 3.3V-pin om problemen met overspanning te voorkomen.
Dus nu we de hardware hebben ingesteld, is het tijd om de Arduino te programmeren.
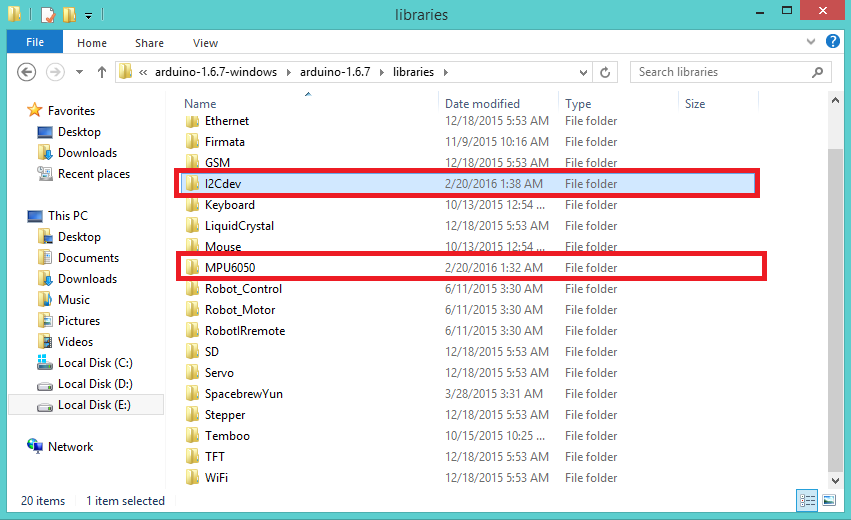
Ten eerste, om de MPU 6050 te testen, klik op deze link en download de arduino-bibliotheek voor MPU 6050. Er is een zip-map met de naam "MPU6050.zip". Download de map en pak de inhoud uit. Kopieer daarna de bibliotheekmap "MPU6050" en plak deze in de bibliotheekmap van Arduino. Dat wil zeggen, je moet naar de locatie gaan waar de map "bibliotheken" van Arduino aanwezig is en dan deze map "MPU6050" erin plakken.
Vervolgens moet je een andere bibliotheek downloaden, genaamd "I2Cdev.zip" (indien niet eerder geïnstalleerd) en deze op dezelfde manier in de Arduino-bibliotheek plakken als de vorige.
Dus nu, in de map "bibliotheken" van Arduino, hebben we twee nieuwe entiteiten. (Fig:8)
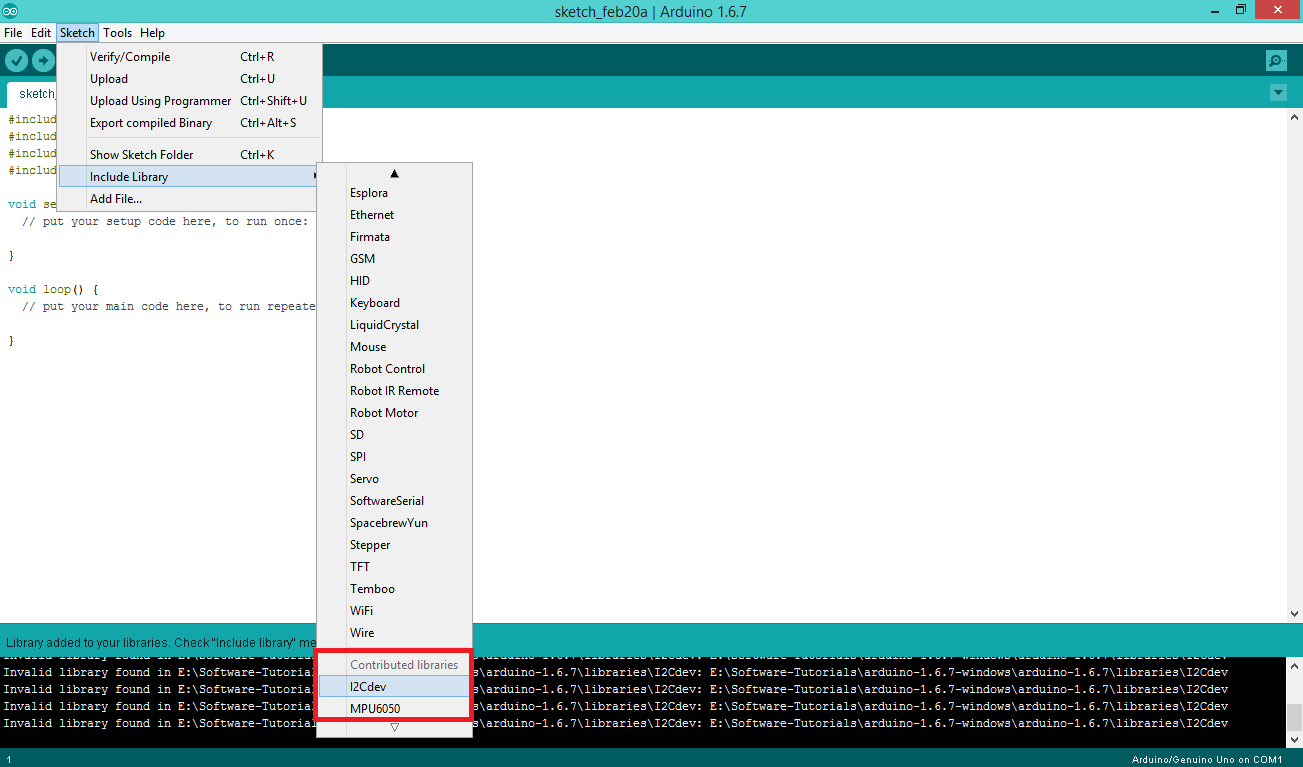
Klik nu op de arduino IDE en kijk of deze nieuwe bibliotheken zichtbaar zijn (Fig (9).
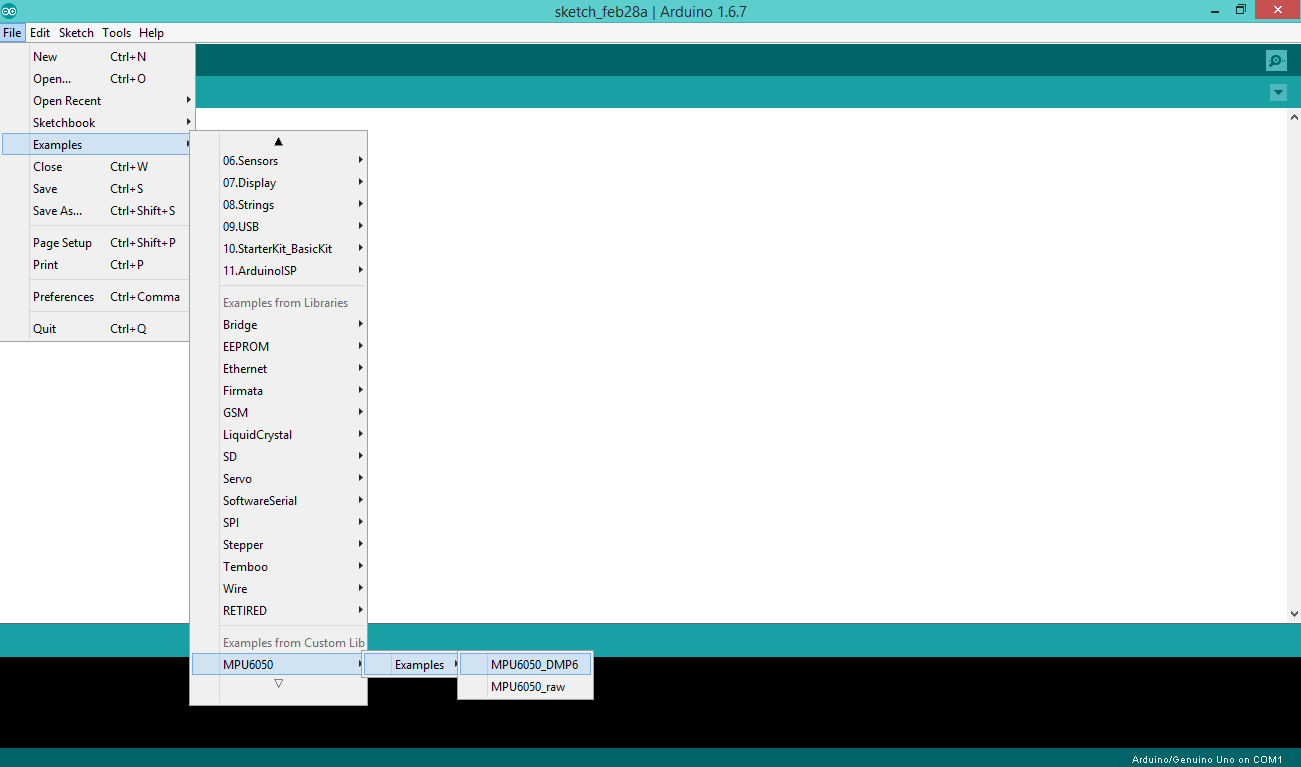
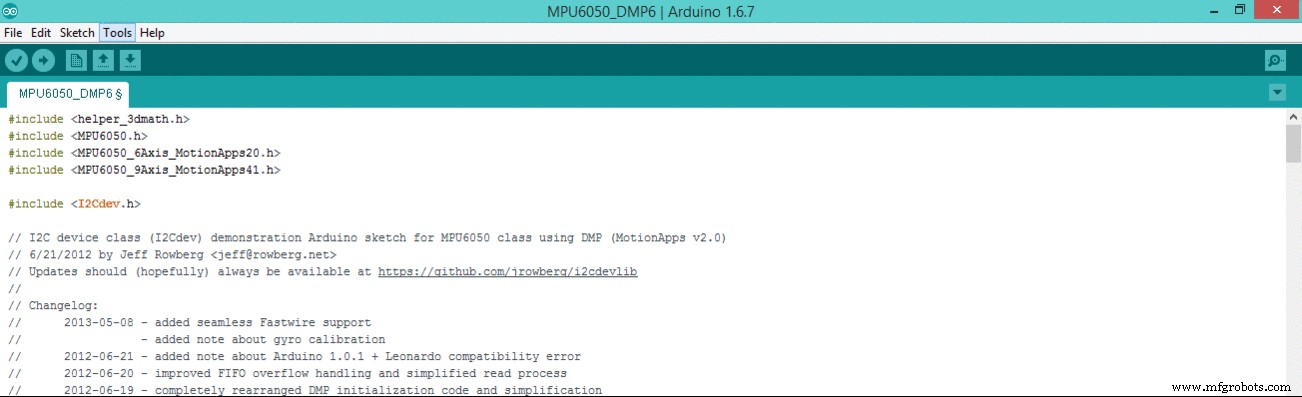
Voordat u deze bibliotheken in uw schets opneemt, moet u de code voor MPU6050 ophalen. Zie Afb. (10)
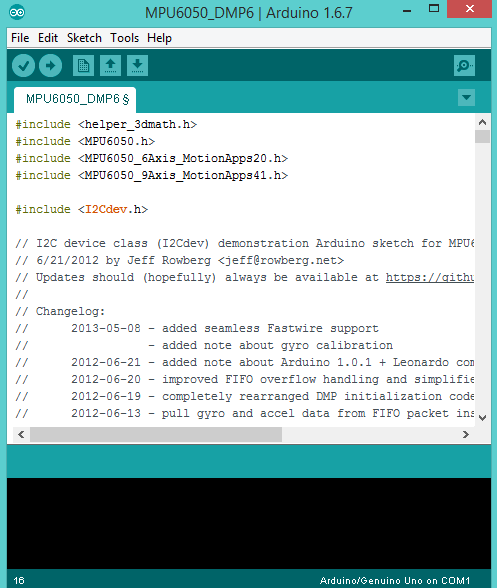
(Bestand> Voorbeelden> MPU6050> Voorbeelden> MPU6050_DMP6). Klik op dit "MPU6050_DMP6"-bestand.
Voeg vervolgens de bibliotheken "I2Cdev" en "MPU6050" toe aan deze schets [Fig (11)].
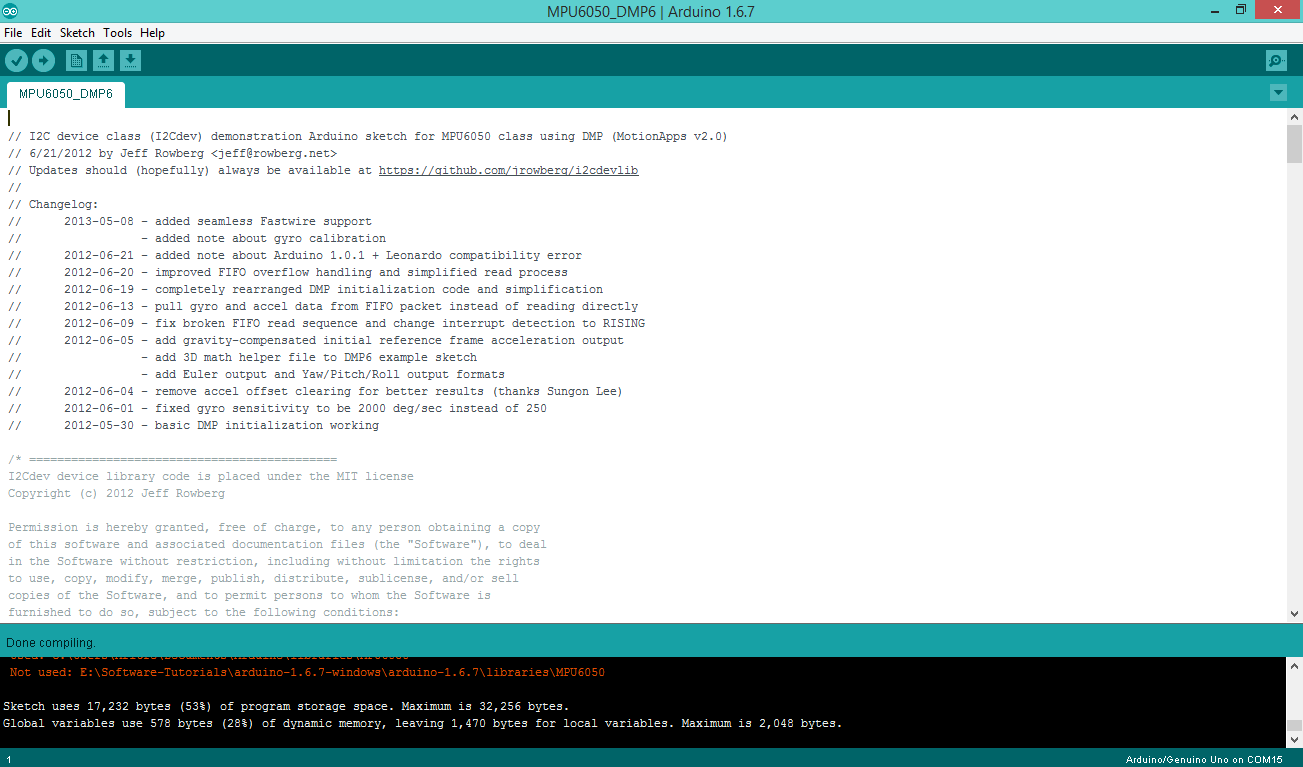
Na alle stappen te hebben gevolgd, COMPILEER de schets [Fig (12)].
Nu blijft de laatste stap over...
Als je merkt dat onder de rechterhoek van dit venster het bericht 'Arduino/Genuino Uno op COM1' staat, controleer dan of het correct is. Als dit niet het geval is, raadpleeg dan [Fig (14)]. Klik nu niet op de seriële monitor. Pas na het uploaden van de schets [zoals in Fig (13)], ga naar de volgende stappen.
U moet ervoor zorgen dat de juiste poort elke keer dat u uw Arduino aansluit, wordt toegewezen.
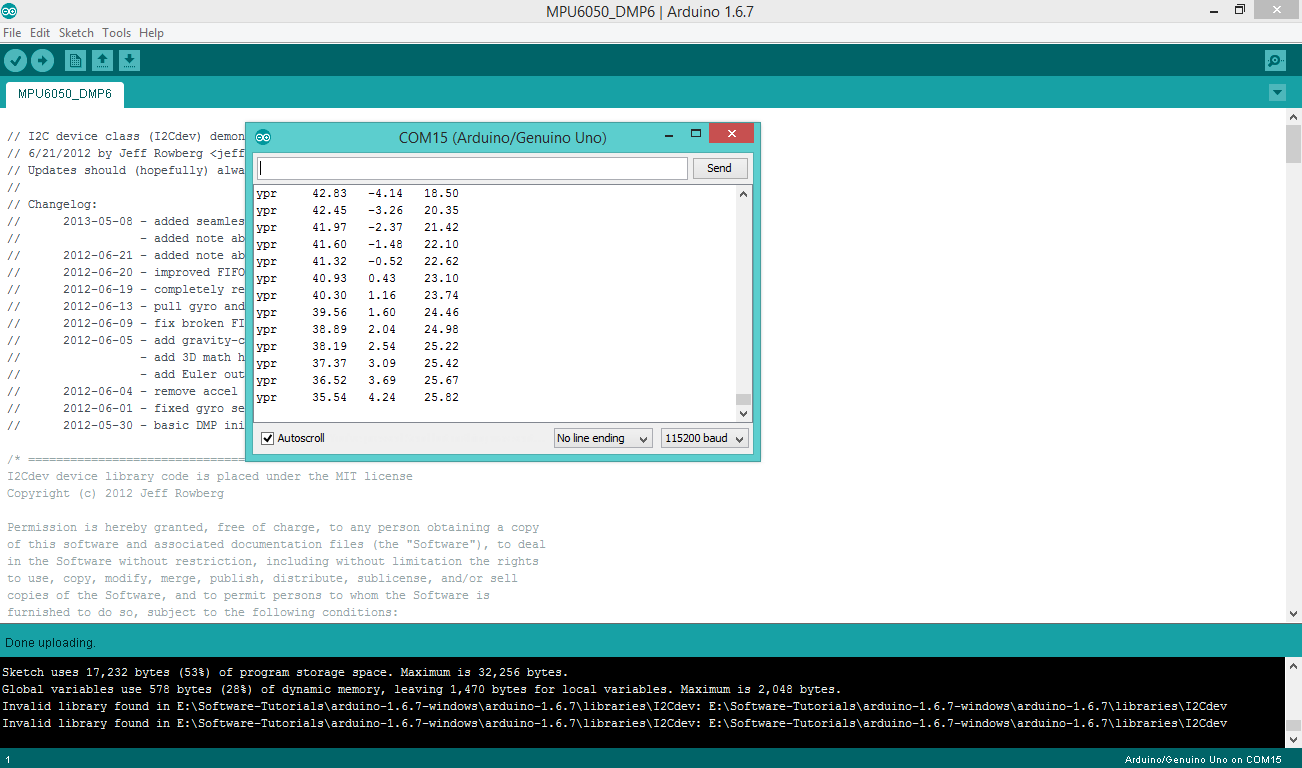
Verward met dit nieuwe venster?? Nou, dat is je uitvoerscherm. Technisch gesproken noemen we het de seriële monitor. Daar lezen we onze waarden af van verschillende sensoren.
STAP: Extra> Seriële monitor of, Sneltoets (Ctrl + Shift + M)
Als je problemen hebt met het uploaden van de schets, ook al heb je de juiste poorten geselecteerd. Klik op deze link (voor Windows-gebruikers). Raadpleeg de handleiding voor Mac-gebruikers. Linux-gebruikers verwijzen naar deze webpagina voor hulp.
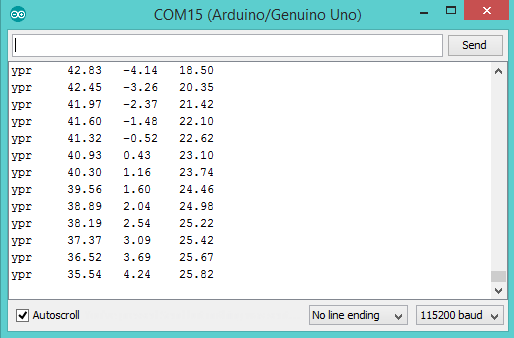
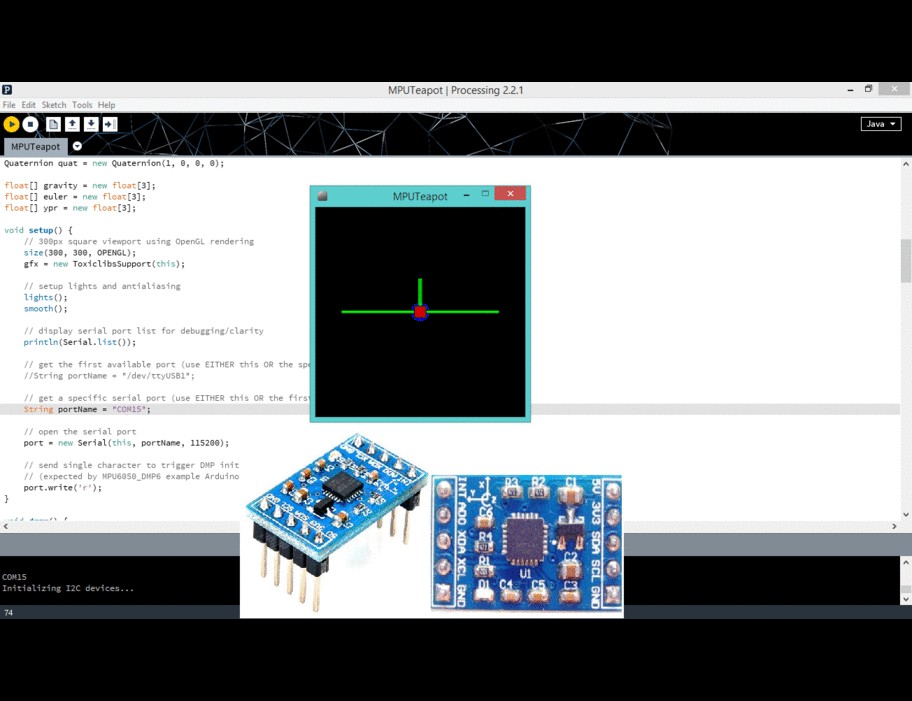
Nadat je de code hebt geüpload, open je de seriële monitor en verander je de "baudrate" in 115200. Als je andere baudrates selecteert, zie je rommelcommentaar omdat die niet synchroon lopen. OPMERKING: 8 MHz of langzamere hostprocessors, zoals de Teensy @ 3.3v of Ardunio Pro Mini met 3.3v, kunnen deze baudsnelheid niet betrouwbaar aan omdat de baudtiming te slecht is uitgelijnd met processortikjes. In deze gevallen moet u 38400 of langzamer gebruiken, of een externe aparte kristaloplossing gebruiken voor de UART-timer.
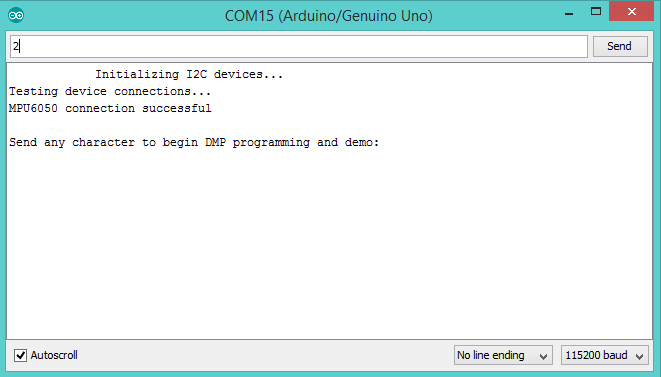
Als u deze verklaring "Initializing I2C devices..." niet op uw scherm ziet, druk dan op de RESET-knop. Het zou nu moeten werken. [Fig (15)]
KENNISHOEK>> U ziet een regel met de tekst "Stuur een willekeurig teken om te beginnen met DMP-programmering en demo:" Wat is DMP??
Antwoord: DMP staat voor Digital Motion Processing . De MPU 6050 van de Invense heeft een ingebouwde bewegingsprocessor. Het verwerkt de waarden van de accelerometer en gyroscoop om ons nauwkeurige 3D-waarden te geven; dat wil zeggen Yaw, Pitch and Roll. [Fig (16)]
KENNISHOEK>> We zagen dat de communicatie tussen de sensor en arduino gebaseerd is op het I2C Bus-protocol. Evenzo hebben we ook een I2C-bibliotheek in dit project opgenomen. weet je waar I2C voor staat?
Antwoord: De I2C-bus bestaat fysiek uit 2 actieve draden en een massaverbinding. De actieve draden, genaamd SDA en SCL , zijn beide bidirectioneel. SDA is de seriële datalijn en SCL is de seriële kloklijn. Elk apparaat dat op de bus is aangesloten, heeft zijn eigen unieke adres, of het nu een MCU, LCD-stuurprogramma, geheugen of ASIC is. Elk van deze chips kan, afhankelijk van de functionaliteit, fungeren als ontvanger en/of zender. Het is duidelijk dat een LCD-driver slechts een ontvanger is, terwijl een geheugen- of I/O-chip zowel zender als ontvanger kan zijn. De I2C-bus is een multi-masterbus. Dit betekent dat er meer dan één IC kan worden aangesloten die een gegevensoverdracht kan initiëren. De I2C-protocolspecificatie stelt dat de IC die een gegevensoverdracht op de bus initieert, wordt beschouwd als de busmaster. Daarom worden op dat moment alle andere IC's als busslaves beschouwd. Aangezien busmasters over het algemeen microcontrollers zijn, is hier bijvoorbeeld de busmaster ArduinoUno. Evenzo is de MPU-sensor de Bus Slave.
Visualiseer de beweging in 3D in mijn volgende tutorial. Klik hier
Code
- Arduino-code voor MPU-sensor
Arduino-code voor MPU-sensorArduino
*/// I2Cdev en MPU6050 moeten als bibliotheken worden geïnstalleerd, anders moeten de .cpp/.h-bestanden// voor beide klassen in het include-pad van uw project staan#include "I2Cdev.h"#include "MPU6050_6Axis_MotionApps20 .h"//#include "MPU6050.h" // niet nodig bij gebruik van MotionApps include file// Arduino Wire-bibliotheek is vereist als I2Cdev I2CDEV_ARDUINO_WIRE implementatie// wordt gebruikt in I2Cdev.h#if I2CDEV_IMPLEMENTATION ==I2CDEV_ARDUINO_WIRE #include "Wire .h"#endif// class standaard I2C-adres is 0x68// specifieke I2C-adressen kunnen hier als parameter worden doorgegeven// AD0 laag =0x68 (standaard voor SparkFun breakout en InvenSense evaluatiebord)// AD0 hoog =0x69MPU6050 mpu;/ /MPU6050 mpu (0x69); // <-- gebruik voor AD0 hoog/* =========================================================================OPMERKING:Naast aansluiting 3.3v, GND, SDA en SCL, deze schets hangt af van het feit dat de INT-pin van de MPU-6050 is aangesloten op de externe interrupt #0-pin van de Arduino. Op de Arduino Uno en Mega 2560 is dit digitale I/O pin 2. * =========================================================================*//* =========================================================================OPMERKING:Arduino v1.0.1 met het Leonardo-bord genereert een compileerfout bij gebruik van Serial.write (buf, len). De output van de theepot gebruikt deze methode. De oplossing vereist een aanpassing aan het Arduino USBAPI.h-bestand, wat gelukkig eenvoudig, maar vervelend is. Dit wordt opgelost in de volgende IDE-release. Zie deze links voor meer informatie:http://arduino.cc/forum/index.php/topic,109987.0.html http://code.google.com/p/arduino/issues/detail?id=958 * =========================================================================*/// verwijder commentaar "OUTPUT_READABLE_QUATERNION" als u de werkelijke// quaternioncomponenten in een [w, x, y, z] formaat (niet het beste voor het ontleden// op een externe host zoals Processing of iets dergelijks)//#define OUTPUT_READABLE_QUATERNION// uncomment "OUTPUT_READABLE_EULER" als u Euler-hoeken// (in graden) wilt zien berekend op basis van de komende quaternionen van de FIFO.// Merk op dat Euler-hoeken last hebben van gimbal-lock (voor meer info, zie// http://en.wikipedia.org/wiki/Gimbal_lock)//#define OUTPUT_READABLE_EULER// uncomment "OUTPUT_READABLE_YAWPITCHROLL" als je wilt om de yaw/// pitch/roll-hoeken (in graden) te zien berekend op basis van de quaternionen die komen// van de FIFO. Merk op dat hiervoor ook zwaartekrachtvectorberekeningen nodig zijn.// Merk ook op dat yaw/pitch/roll-hoeken last hebben van gimbal-lock (voor// meer info, zie:http://en.wikipedia.org/wiki/Gimbal_lock)#define OUTPUT_READABLE_YAWPITCHROLL/ / uncomment "OUTPUT_READABLE_REALACCEL" als u acceleratie// componenten met zwaartekracht verwijderd wilt zien. Dit versnellingsreferentieframe is// niet gecompenseerd voor oriëntatie, dus +X is altijd +X volgens de// sensor, alleen zonder de effecten van de zwaartekracht. Als u versnelling// gecompenseerde oriëntatie wilt, gebruikt u in plaats daarvan OUTPUT_READABLE_WORLDACCEL.//#define OUTPUT_READABLE_REALACCEL// uncomment "OUTPUT_READABLE_WORLDACCEL" als u versnelling// componenten met zwaartekracht verwijderd en aangepast voor het wereldframe van// referentie (yaw is ten opzichte van de initiële oriëntatie, aangezien in dit geval geen magnetometer// aanwezig is). Kan in sommige gevallen best handig zijn.//#define OUTPUT_READABLE_WORLDACCEL// verwijder het commentaar bij "OUTPUT_TEAPOT" als u uitvoer wilt die overeenkomt met het//-formaat dat wordt gebruikt voor de InvenSense-theepotdemo//#define OUTPUT_TEAPOT#define LED_PIN 13 // (Arduino is 13 , Teensy is 11, Teensy++ is 6) bool blinkState =false;// MPU-besturing/status varsbool dmpReady =false; // stel waar in als DMP init succesvol wasuint8_t mpuIntStatus; // bevat actuele interruptstatusbyte van MPUuint8_t devStatus; // retourstatus na elke apparaatbewerking (0 =geslaagd, !0 =fout) uint16_t packetSize; // verwachte DMP-pakketgrootte (standaard is 42 bytes) uint16_t fifoCount; // telling van alle bytes die momenteel in FIFOuint8_t fifoBuffer [64]; // FIFO-opslagbuffer// oriëntatie/beweging varsQuaternion q; // [w, x, y, z] quaternion containerVectorInt16 aa; // [x, y, z] accel sensor metingenVectorInt16 aaReal; // [x, y, z] zwaartekracht-vrije accel sensor metingen VectorInt16 aaWorld; // [x, y, z] wereld-frame accel sensor metingen VectorFloat zwaartekracht; // [x, y, z] zwaartekracht vectorfloat euler [3]; // [psi, theta, phi] Euler hoek containerfloat ypr[3]; // [yaw, pitch, roll] yaw/pitch/roll container en zwaartekracht vector// pakketstructuur voor InvenSense theepot demouint8_t teapotPacket[14] ={ '$', 0x02, 0,0, 0,0, 0,0, 0,0, 0x00, 0x00, '\r', '\n' };// ================================================================// ===DETECTIEROUTINE ONDERBREKEN ===// ================================================================vluchtige bool mpuInterrupt =false; // geeft aan of de MPU-interrupt-pin highvoid is geworden dmpDataReady() {mpuInterrupt =true;}// ================================================================// ===EERSTE INSTELLING ===// ================================================================void setup() {// join I2C bus (I2Cdev bibliotheek doet dit niet automatisch) #if I2CDEV_IMPLEMENTATION ==I2CDEV_ARDUINO_WIRE Wire.begin(); TWBR =24; // 400 kHz I2C-klok (200 kHz als CPU 8 MHz is) #elif I2CDEV_IMPLEMENTATION ==I2CDEV_BUILTIN_FASTWIRE Fastwire::setup(400, true); #endif // initialiseer seriële communicatie // (115200 gekozen omdat het vereist is voor uitvoer van theepotdemo's, maar het is echt aan jou, afhankelijk van je project) Serial.begin(115200); terwijl (!Serial); // wacht op Leonardo-telling, anderen gaan onmiddellijk verder // OPMERKING:hostprocessors van 8 MHz of langzamer, zoals de Teensy @ 3.3v of Ardunio // Pro Mini die op 3.3v draait, kunnen deze baudsnelheid niet betrouwbaar aan vanwege // de baudtiming te slecht uitgelijnd met processorticks. U moet in deze gevallen // 38400 of langzamer gebruiken, of een externe aparte // kristaloplossing gebruiken voor de UART-timer. // initialiseer apparaat Serial.println (F ("I2C-apparaten initialiseren ...")); mpu.initialiseren(); // verifieer verbinding Serial.println (F ("Testapparaatverbindingen...")); Serial.println(mpu.testConnection() ? F("MPU6050 verbinding succesvol") :F("MPU6050 verbinding mislukt")); // wacht op gereed Serial.println(F("\nStuur een willekeurig teken om de DMP-programmering en demo te starten:")); while (Serial.available() &&Serial.read()); // lege buffer while (!Serial.available()); // wacht op gegevens terwijl (Serial.available() &&Serial.read()); // lege buffer opnieuw // laad en configureer de DMP Serial.println(F("Initializing DMP...")); devStatus =mpu.dmpInitialize(); // geef hier uw eigen gyro-offsets op, geschaald voor minimale gevoeligheid mpu.setXGyroOffset(220); mpu.setYGyroOffset(76); mpu.setZGyroOffset(-85); mpu.setZAccelOffset (1788); // 1688 fabrieksinstelling voor mijn testchip // zorg ervoor dat het werkte (retourneert 0 als dat zo is) if (devStatus ==0) { // zet de DMP aan, nu deze klaar is Serial.println(F ("DMP inschakelen. ..")); mpu.setDMPEnabled(true); // Arduino-interruptdetectie inschakelen Serial.println (F ("Interruptdetectie inschakelen (Arduino externe interrupt 0) ...")); attachInterrupt(0, dmpDataReady, RISING); mpuIntStatus =mpu.getIntStatus(); // stel onze DMP Ready-vlag zo in dat de hoofdlus()-functie weet dat het goed is om deze te gebruiken Serial.println(F("DMP ready! Waiting for first interrupt...")); dmpReady =waar; // haal de verwachte DMP-pakketgrootte op voor latere vergelijking packetSize =mpu.dmpGetFIFOPacketSize(); } anders { // FOUT! // 1 =initiële geheugenbelasting mislukt // 2 =DMP-configuratie-updates mislukt // (als het kapot gaat, is de code meestal 1) Serial.print(F ("DMP-initialisatie mislukt (code")); Serial. print(devStatus);Serial.println(F(")")); } // configureer LED voor output pinMode (LED_PIN, OUTPUT);}// ================================================================// ===HOOFDPROGRAMMA LUS ===// ================================================================void loop() {// als het programmeren is mislukt, probeer dan niets te doen als (!dmpReady) terugkeert; // wacht op MPU-interrupt of extra pakket(ten) beschikbaar terwijl (!mpuInterrupt &&fifoCount 1 pakket beschikbaar is // (hierdoor kunnen we meteen meer lezen zonder te wachten op een onderbreking) fifoCount -=packetSize; #ifdef OUTPUT_READABLE_QUATERNION // toon quaternion-waarden in eenvoudige matrixvorm:w x y z mpu.dmpGetQuaternion(&q, fifoBuffer); Serial.print("quat\t"); Serial.print(q.w); Serieel.print("\t"); Serial.print(q.x); Serieel.print("\t"); Serial.print(q.y); Serieel.print("\t"); Serieel.println(q.z); #endif #ifdef OUTPUT_READABLE_EULER // toon Euler-hoeken in graden mpu.dmpGetQuaternion(&q, fifoBuffer); mpu.dmpGetEuler(euler, &q); Serial.print("euler\t"); Serial.print(euler[0] * 180/M_PI); Serieel.print("\t"); Serial.print(euler[1] * 180/M_PI); Serieel.print("\t"); Serial.println(euler[2] * 180/M_PI); #endif #ifdef OUTPUT_READABLE_YAWPITCHROLL // toon Euler-hoeken in graden mpu.dmpGetQuaternion(&q, fifoBuffer); mpu.dmpGetGravity(&gravity, &q); mpu.dmpGetYawPitchRoll(ypr, &q, &gravity); Serial.print("ypr\t"); Serial.print(ypr[0] * 180/M_PI); Serieel.print("\t"); Serial.print(ypr[1] * 180/M_PI); Serieel.print("\t"); Serial.println(ypr[2] * 180/M_PI); #endif #ifdef OUTPUT_READABLE_REALACCEL // echte versnelling weergeven, aangepast om zwaartekracht te verwijderen mpu.dmpGetQuaternion(&q, fifoBuffer); mpu.dmpGetAccel(&aa, fifoBuffer); mpu.dmpGetGravity(&gravity, &q); mpu.dmpGetLinearAccel(&aaReal, &aa, &gravity); Serial.print("areaal\t"); Serial.print(aaReal.x); Serieel.print("\t"); Serial.print(aaReal.y); Serieel.print("\t"); Serial.println(aaReal.z); #endif #ifdef OUTPUT_READABLE_WORLDACCEL // geeft initiële wereldframeversnelling weer, aangepast om zwaartekracht te verwijderen // en geroteerd op basis van bekende oriëntatie van quaternion mpu.dmpGetQuaternion(&q, fifoBuffer); mpu.dmpGetAccel(&aa, fifoBuffer); mpu.dmpGetGravity(&gravity, &q); mpu.dmpGetLinearAccel(&aaReal, &aa, &gravity); mpu.dmpGetLinearAccelInWorld(&aaWorld, &aaReal, &q); Serial.print("aworld\t"); Serial.print(aaWorld.x); Serieel.print("\t"); Serial.print(aaWorld.y); Serieel.print("\t"); Serial.println(aaWorld.z); #endif #ifdef OUTPUT_TEAPOT // toon quaternion-waarden in InvenSense Teapot-demo-indeling:teapotPacket[2] =fifoBuffer[0]; theepotPacket[3] =fifoBuffer[1]; theepotPacket[4] =fifoBuffer[4]; theepotPacket[5] =fifoBuffer[5]; theepotPacket[6] =fifoBuffer[8]; theepotPacket[7] =fifoBuffer[9]; theepotPacket[8] =fifoBuffer[12]; theepotPacket[9] =fifoBuffer[13]; Serial.write (theepotpakket, 14); theepotPakket[11]++; // packetCount, lussen expres op 0xFF #endif // knipperende LED om activiteit aan te geven blinkState =!blinkState; digitalWrite (LED_PIN, blinkState); }} Schema's
Productieproces
- Lijnvolgsensor met RPi
- Milieusensor-API met een RPi
- Bewegingssensor met Raspberry Pi
- Raspberry Pi GPIO met PIR-bewegingssensor:beste tutorial
- Interfacing HC-SR501 PIR-bewegingssensor met Raspberry Pi
- Aan de slag met TJBot
- Aan de slag met de RAK 831 Lora Gateway en RPi3
- Aan de slag met de RAK831 LoRa Gateway en RPi3
- Aan de slag met AI in verzekeringen:een inleidende gids
- Arduino-zelfstudie 01:Aan de slag
- Aan de slag met de Eagle Group:wat u moet weten