


Spraakgestuurde auto
Componenten en benodigdheden
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 |
Over dit project
Componenten:
- Arduino Uno
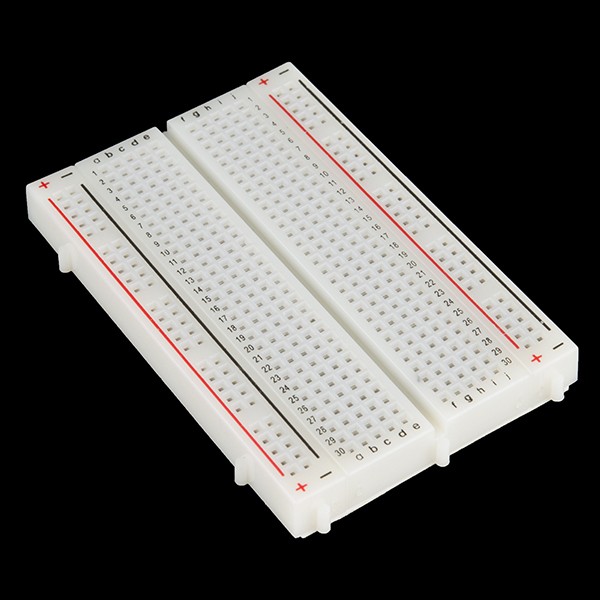
- Broodplank
- Motoren x2
- Wielen x2
- Chassis (van de juiste maat)
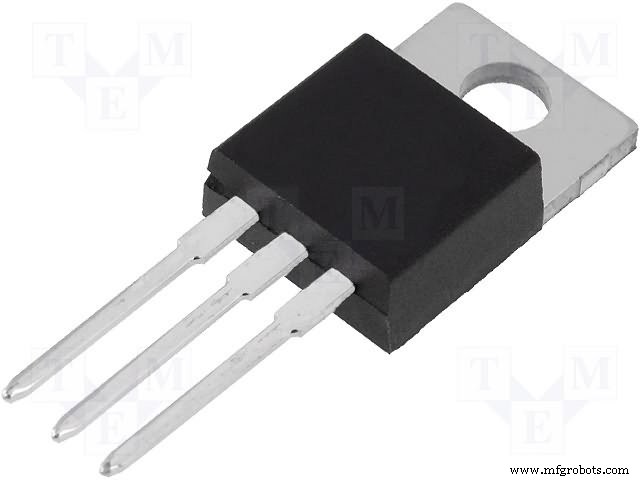
- Spanningsregelaar LM7805
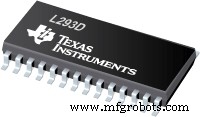
- L293D
- 12V batterij (stroombron)
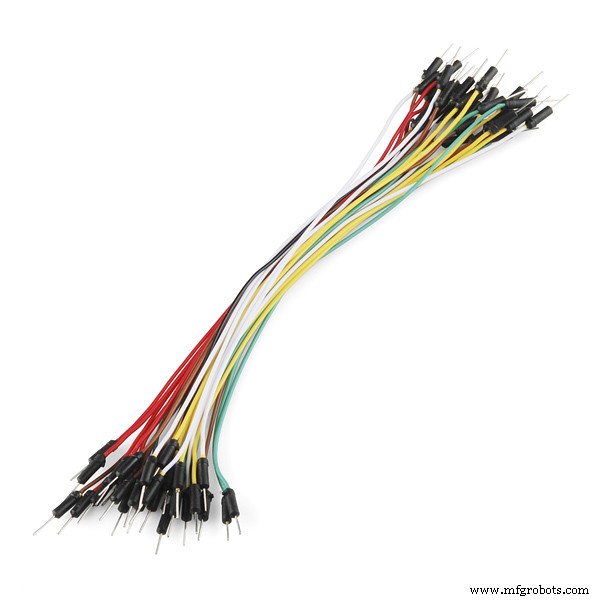
- Jumperdraden
- Bluetooth-module HC-05
Je kunt de app hier vinden:https://play.google.com/store/apps/details?id=appinventor.ai_cempehlivan92.Arduino_Sesli_Kontrol
Idee:
We verbinden de Bluetooth-module met de mobiele app. Als je klaar bent, worden de opdrachten die we via de mobiel geven via de module naar de Arduino gestuurd. We accepteren teken voor teken uit de seriële buffer die door de app wordt verzonden en combineren ze om een tekenreeks te vormen.
We vergelijken het dan met het commando. Als het overeenkomt, wordt de opdracht uitgevoerd. Als de string die we ontvangen bijvoorbeeld "Rechts" is, draait de bot naar rechts.
Verbindingen:
Vind hier alle connecties:https://yainnoware.blogspot.com/p/voice-controlled-car.html
Code:
int motor_input1=11;int motor_input2=10;int motor_input3=5;int motor_input4=6;String voice;void setup() { Serial.begin(9600); pinMode (motor_input1, OUTPUT); // RECHTER MOTOR pinMode (motor_input2, OUTPUT); // RECHTER MOTOR pinMode (motor_input3, OUTPUT); // LINKER MOTOR pinMode (motor_input4, OUTPUT); //LEFT MOTOR}void loop() { while(Serial.available()>0) { delay(10); char c=Serial.read(); if(c=='#') { pauze; } stem+=c; } if(voice=="forward"){ digitalWrite(motor_input1, LOW); digitalWrite (motor_input2, HOOG); digitalWrite (motor_input3, LAAG); digitalWrite (motor_input4, HOOG); vertraging (5000); } else if(voice=="back"){ digitalWrite(motor_input1, HIGH); digitalWrite (motor_input2, LAAG); digitalWrite (motor_input3, HOOG); digitalWrite (motor_input4, LAAG); delay(5000);} else if(voice=="left"){ digitalWrite(motor_input1, LOW); digitalWrite (motor_input2, HOOG); digitalWrite (motor_input3, HOOG); digitalWrite (motor_input4, LAAG); vertraging (800); } else if(voice=="right"){ digitalWrite(motor_input1, HIGH); digitalWrite (motor_input2, LAAG); digitalWrite (motor_input3, LAAG); digitalWrite (motor_input4, HOOG); vertraging (800); } if(voice.length()>0) { Serial.println(voice); stem=""; digitalWrite (motor_input1, LAAG); digitalWrite (motor_input2, LAAG); digitalWrite (motor_input3, LAAG); digitalWrite (motor_input4, LAAG); } } Productieproces
- MajorTom:Alexa Voice Controlled ARDrone 2.0
- Arduino digitale dobbelstenen
- DIY 37 LED Roulette Game
- Met joystick bestuurde RC-auto
- ATtiny85 Mini Arcade:Snake
- Draagbare afstandsdetector
- MobBob:doe-het-zelf Arduino-robot bestuurd door Android-smartphone
- App-gestuurde hydraulische kraan
- Smart Face Tracking Robot Car
- Arduino-gestuurde pianorobot:PiBot
- galvaniseren met koper