


PWM lezen, invoer van RC-ontvanger decoderen en fail-safe toepassen
Componenten en benodigdheden
 |
| × | 1 | |||
 |
| × | 2 |
Over dit project
Dit project bevat generieke maar efficiënte code die kan worden gebruikt om eenvoudig een RC-ontvanger (of een ander PWM-signaal) op elke Arduino-ingangspin te lezen en ook een fail-safe toe te passen in het geval van verlies van het zendersignaal.
Hieronder ziet u een video die een Arduino uno laat zien die fungeert als een servomixer met behulp van de code PWMread_RCfailsafe.ino die onderaan deze pagina beschikbaar is.
De functies in PWMread_RCfailsafe.ino zorgen voor de interruptregisters en kunnen gemakkelijk worden verplaatst tussen verschillende projecten die verschillende pinnen gebruiken.
In het onderstaande videovoorbeeld:
- De fail-safe wordt geactiveerd wanneer de ontvanger geen signaal van de zender heeft. liftkanaal is ingesteld op vol en rolroerkanaal is ingesteld op neutraal
- De richting van de blauwe servo wordt bepaald door de gasklepstand
- Het bewegingsbereik (snelheden) van de blauwe servo wordt ingesteld door de schuifregelaar aan de zijkant van de zender
- Het mixen wordt aan- en uitgezet met de versnellingsschakelaar op de zender
Inhoud
- Hoe worden servo's bestuurd door PWM
- Voorbeeld van gebruik van Arduino in RC-modellen / robots
- Code-overzicht:decodeer PWM van RC-ontvanger met fail-safe
- PWMread_RCfailsafe.ino gebruiken
- Geef de framesnelheid en frequentie van de ontvanger weer
- Servo-mengvoorbeeld
- Rationale voor de gekozen aanpak
- Beperkingen
Hoe worden servo's en snelheidsregelaars aangestuurd door PWM?
In de rest van dit project wordt ervan uitgegaan dat je inzicht hebt in de PWM-signalen die worden gebruikt om servo's en snelheidsregelaars te besturen. Hier is een goede video waarin wordt uitgelegd hoe deze pulsbreedtemodulatie (PWM)-signalen werken.
Je moet ook praktische kennis hebben van:
- De Arduino IDE
- Float-, boolean- en int-variabelen
- Als lussen
- For-lussen
- Arrays
- Servobibliotheek
Voorbeeldgebruik van Arduino in RC-modellen / robots
Je wordt alleen beperkt door je verbeeldingskracht:
- Servermenging toepassen, lichten aan/uit schakelen, pompen/kleppen regelen, op maat gemaakte sequenties instellen...
- Maak een controller (d.w.z. vluchtstabilisatie/ stuurautomaat, koers vasthouden, hoogte/diepte vasthouden, automatische nivellering, detecteren en vermijden, terug naar huis...)
- Laat uw RC-model reageren op signaalverlies of lage batterijspanning...
- Gebruik dezelfde zender voor meerdere modellen/projecten zonder dat u instellingen hoeft te wijzigen of een modelgeheugenfunctie hoeft te gebruiken.
Codeoverzicht:Decodeer PWM van RC-ontvanger met fail-safe
Deze code meet PWM-signalen (Pulse Width Modulation) met behulp van pinwisselinterrupts. De gebruikte functies automatiseren de instelling van de interrupts en de extractie van gegevens van elke digitale of analoge pin (behalve A6 en A7), op de Arduino Uno, Nano of Pro Mini. Dit maakt de code gemakkelijk te gebruiken, zelfs voor beginners.
Het primaire doel van dit project was om een generieke RC-ontvanger te maken met een faalveilige "module" die snel tussen projecten kan worden verplaatst. Als zodanig kan de voorbeeldcode die wordt weergegeven in de sectie "hoe te gebruiken" gewoon worden gebruikt als een middel om een doel te bereiken.
Opmerking: deze code werkt niet met de softwareserie of enige andere bibliotheek die pinwijzigingsonderbrekingen gebruikt.
Voor degenen die geïnteresseerd zijn in hoe de code werkt:
- De invoerpinnen worden geïdentificeerd in een array. Deze array kan elke lengte hebben.
- Een setup-functie maakt onderbrekingen van pinwissels mogelijk door de juiste registers in te stellen voor elke pin in de pin-array.
- Een spanningsverandering op een van de geselecteerde pinnen zal een van de drie Interrupt Service Routes (ISR) activeren, afhankelijk van tot welk poortregister de pin behoort ISR(PCINT0_vect) -> Poort B, ISR(PCINT1_vect) -> Poort C of ISR(PCINT2_vect) -> Poort D.
- Binnen elke ISR worden een FOR-lus en IF-statements gebruikt om te bepalen welke pin is gewijzigd en bij welk RC-kanaal deze hoort. De tijd van de onderbreking wordt genoteerd via het gebruik van micros() alvorens terug te keren naar de hoofdlus().
- De tijdsintervallen tussen pinwisselingen worden gebruikt om de pulsduur en herhalingsperiode te berekenen.
- In elke ISR worden vlaggen geplaatst om aan te geven wanneer nieuwe pulsen zijn ontvangen
- De vlaggen worden vervolgens door de overige functies gebruikt om de door de ISR's verzamelde gegevens te extraheren en te verwerken
De volgende YouTube-video gemaakt door Joop Brokking heeft het over een ander project dat dezelfde methode gebruikt om een RC-ontvanger op Arduino aan te sluiten. Tijdens de eerste 8 minuten legt Joop duidelijk uit hoe je moet gebruik pin change interrupts om PWM-signalen van een RC-ontvanger te meten.
Al deze details worden verzorgd door PWMread_RCfailsafe.ino die onderaan deze pagina kan worden gedownload.
Enige nuttige informatie over poortmanipulatie is ook hier te vinden: https://tronixstuff.com/2011/10/22/tutorial-arduino-port-manipulation/
Naast de pin change interrupt handling, is er een speciale functie RC_decode() geschreven om een pulsbreedte (1000-2000uS) om te zetten in een +-100% stuursignaal van een zender. Een fail-safe controleert op een geldig zendersignaal met behulp van de signaaltoleranties van 10-330Hz en 500-2500uS. Als het signaal wegvalt, retourneert RC_decode() een vooraf bepaalde faalveilige waarde.
De kalibratiewaarden voor een specifieke zender en faalveilige posities kunnen voor elk kanaal worden ingesteld in PWMread_RCfailsafe.ino
PWMread_RCfailsafe.ino gebruiken
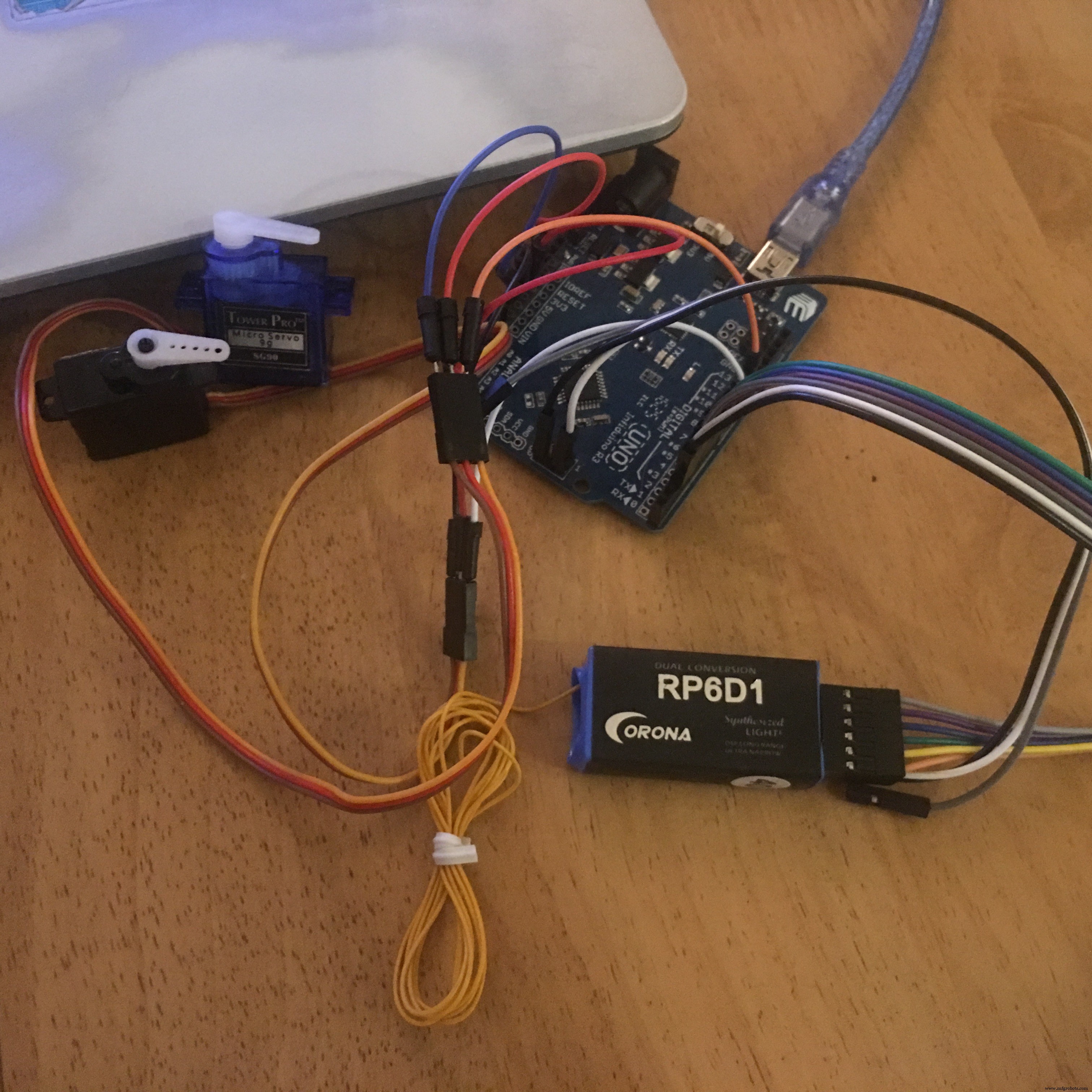
Stap 1: Voorbeeld hardware configuratie met Arduino Uno
Als u de voorbeeldconfiguratie met een Arduino Uno volgt, sluit u uw ontvanger als volgt aan:(anders als u uw eigen project gebruikt, gaat u direct naar stap 2)
- Voed de ontvanger aan met behulp van de 5v- en GND-pinnen
- Verbind de signaalpinnen van de ontvanger met pinnen 2 tot 7 op de Arduino met behulp van vrouwelijke naar mannelijke jumperdraden. (Als je een 2-kanaals ontvanger hebt, sluit je alleen aan op pin 2 en 3)
- Voor het voorbeeld van de servomixer sluit u één servosignaaldraad aan op pin 9 en de andere op pin 10.
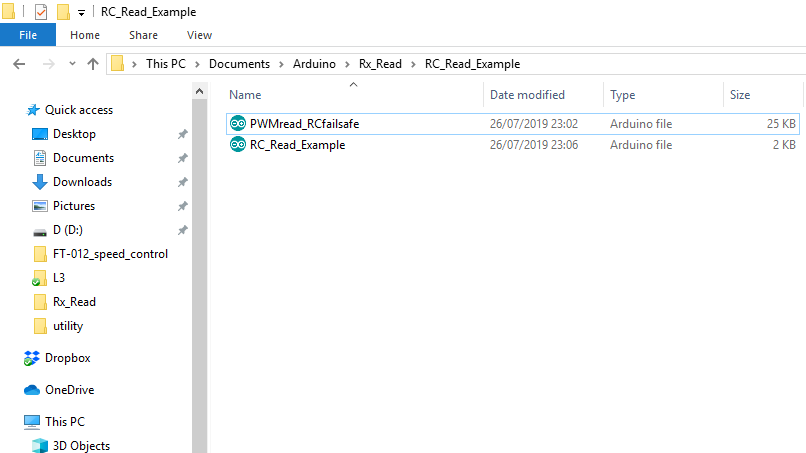
Stap 2:Kopieer PWMread_RCfailsafe.ino naar de schetsmap
Onderaan de pagina is een voorbeeldschets RC_Read_Example opgenomen om te downloaden. Je kunt dit als hoofdschets gebruiken als je de onderstaande stappen volgt.
Kopieer en plak het PWMread_RCfailsafe.ino-bestand in de map met uw hoofdschets. Wanneer u de schets de volgende keer in de IDE opent, verschijnt een tweede tabblad met de code in PWMread_RCfailsafe.ino.
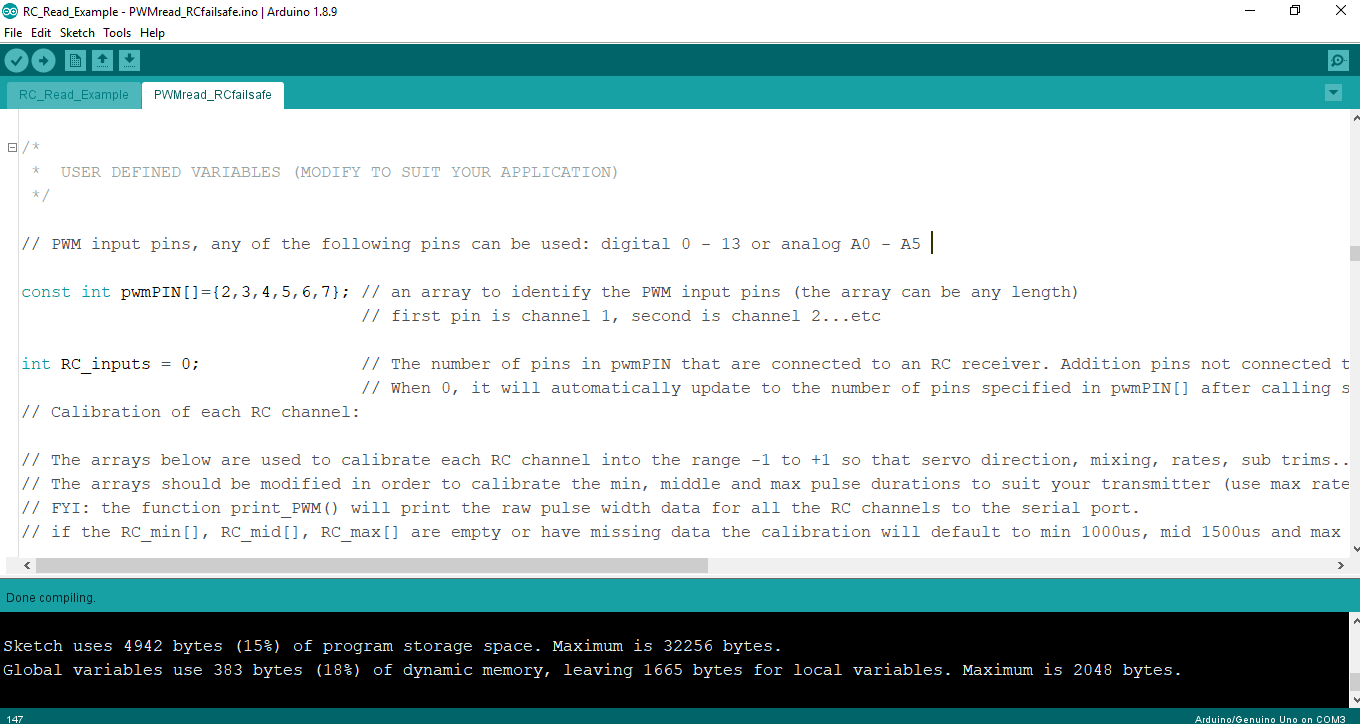
Stap 3:Specificeer de invoer spelden
Open of heropen de hoofdschets in de Arduino IDE.
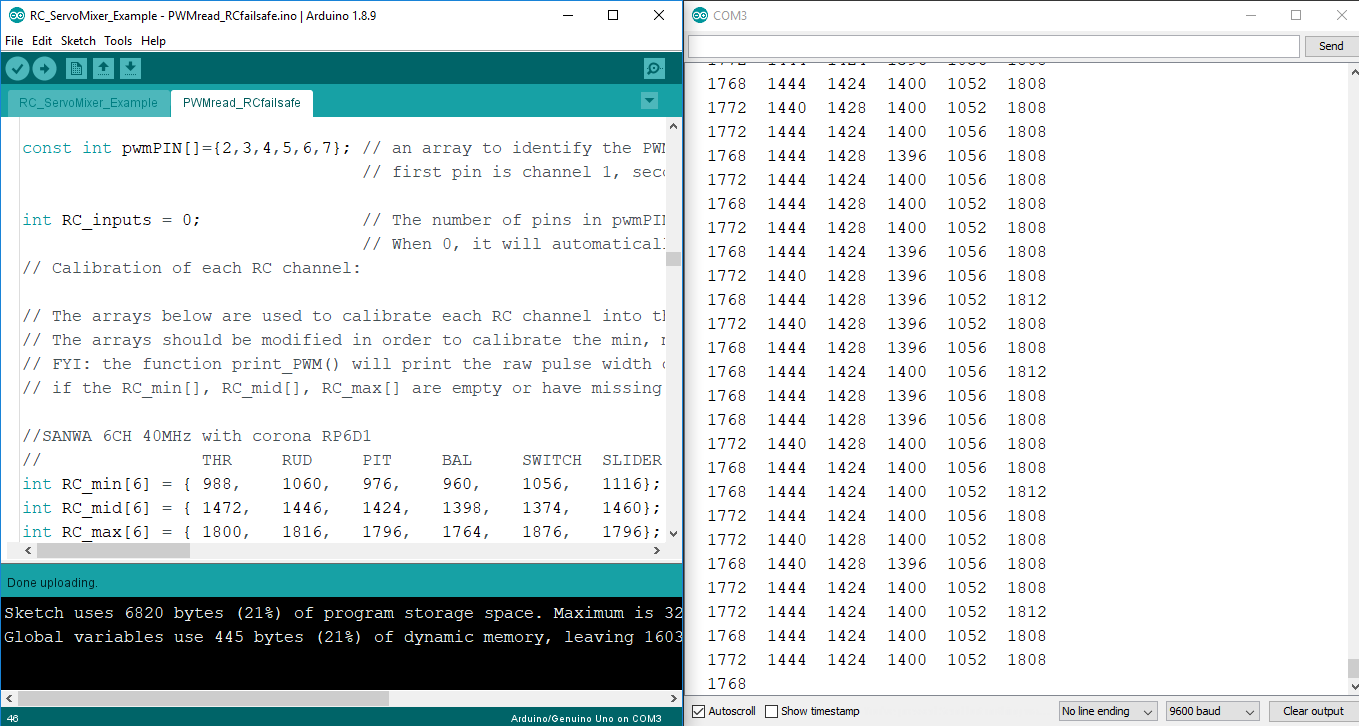
Klik op het tabblad PWMread_RCfailsafe, scrol omlaag naar de titel "USER DEFINED VARIABLES" en voer de invoerpinnen in de array pwmPIN[] in.
Opmerking: Elk aantal pinnen kan worden gebruikt, en in elke volgorde. Houd er rekening mee dat hoe meer invoer je hebt, hoe meer tijd de code zal besteden aan het adresseren van de interruptroutine. Opmerking A6 en A7 zijn alleen analoge pinnen en kunnen niet worden gebruikt.
De Arduino MEGA wordt momenteel niet ondersteund, maar dit zou gemakkelijk kunnen worden verholpen als er animo voor was.
Opmerking: het eerste element in pwmPIN[] is kanaal 1, het tweede element kanaal 2, enz... als u alle kanalen van de ontvanger gebruikt, is het een goed idee om ervoor te zorgen dat de ontvangerkanalen 1 overeenkomen met kanaal 1 in pwmPIN[]...
Stap 4: Recensie de beschikbaar functies in PWMread_RCfailsafe.ino
Stap 5: Afdrukken de puls breedte gegevens naar serie
Upload de RC_Read_Example-code, zet uw zender aan en print de onbewerkte pulsbreedtegegevens naar serieel.
De functie RC_avail() moet worden gebruikt om te controleren wanneer nieuwe gegevens op alle kanalen zijn ontvangen en gebruik vervolgens print_RCpwm() om de pulsbreedtegegevens naar serieel te verzenden.
Stap 6: Kalibreer de zender
Gebruik de pulsbreedtegegevens die via print_RCpwm() naar serieel zijn afgedrukt om de waarden in de arrays RC_min[], RC_mid[] en RC_max[] handmatig te wijzigen om elk kanaal in het bereik van +-100% te kalibreren.
Stap 7:Druk de gekalibreerde kanalen af naar serie
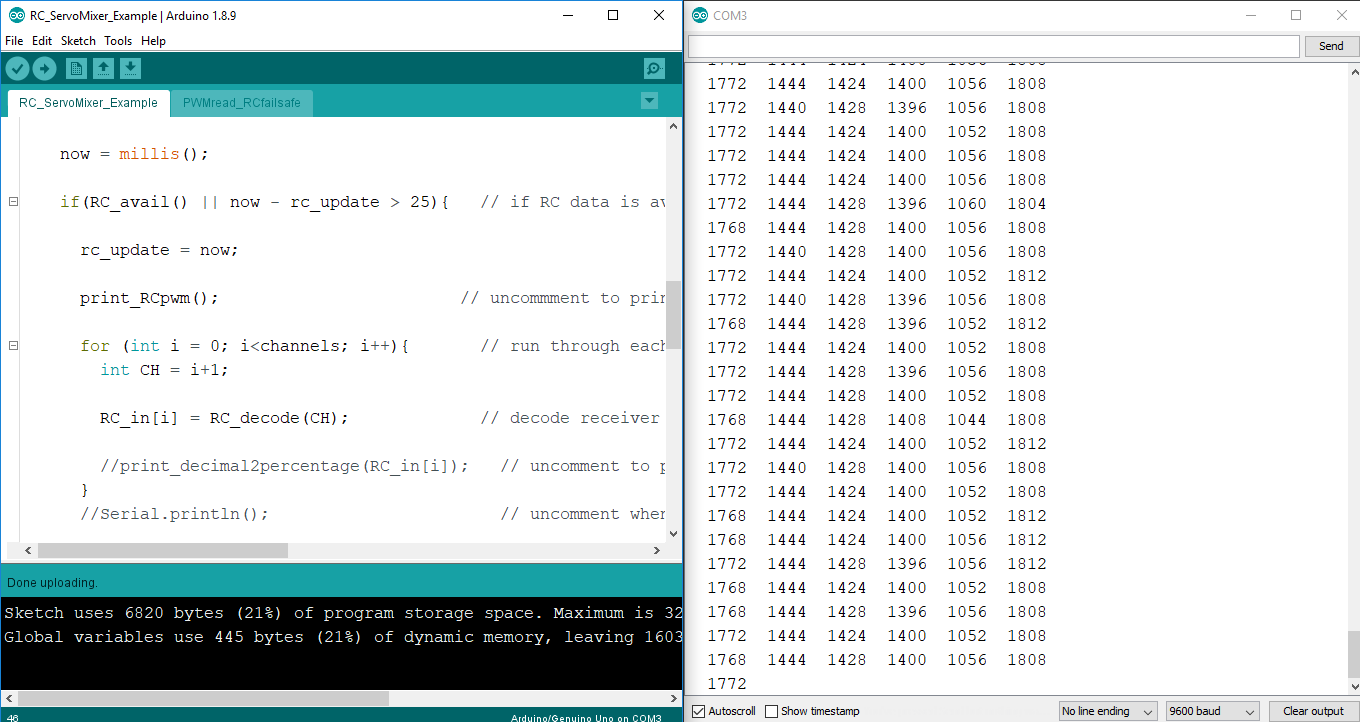
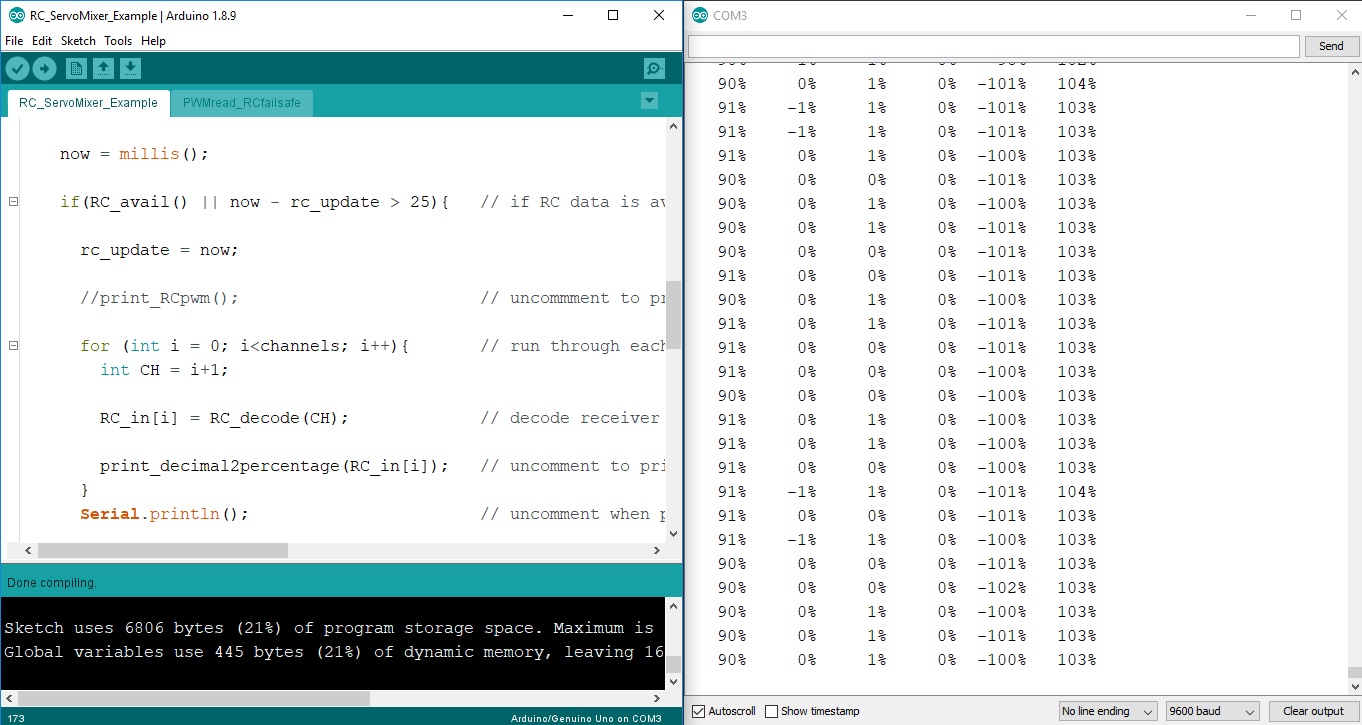
Geef commentaar op de functie print_RCpwm()
Gebruik de functie RC_decode(kanaal) om elk kanaal in het bereik +-1 te kalibreren.
Druk vervolgens elk van de gekalibreerde kanalen af naar serieel met behulp van de functie decimal2percentage() gevolgd door Serial.println("")
Stap 8: Stel de fail-safe in
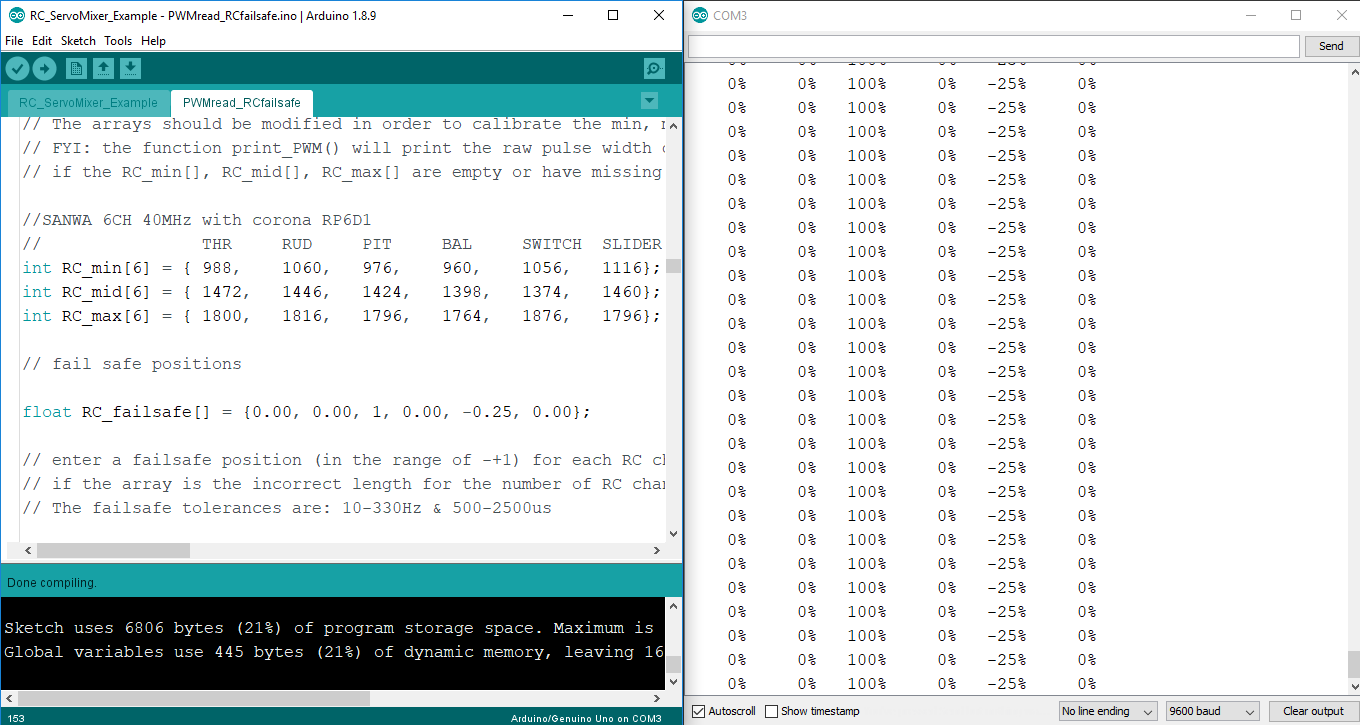
Pas de faalveilige posities in de RC_failsafe[]-array aan voor elk kanaal (in het bereik +-1).
Zet de zender aan en uit om te controleren of de fail-safe naar wens werkt.
De RC-ingang kan nu in je schets worden gebruikt.
Opmerking: het kan zijn dat u een faalveilige functie in de ontvanger moet deactiveren, anders kan de arduino niet reageren op het verlies van het zendersignaal.
Geef de framesnelheid en frequentie van de ontvanger weer
De herhalingsperiode van de ontvangerpuls en de frequentie kunnen naar serieel worden afgedrukt. Controleer of er nieuwe gegevens beschikbaar zijn op het gekozen kanaal met behulp van de functie PWM_read(kanaalnummer), voordat u PWM_period() en PWM_freq() gebruikt om de gegevens voor afdrukken te extraheren. Voorbeeldcode is beschikbaar in RC_FrameRate.ino.
Het is het beste om het eerste kanaal te gebruiken, omdat dit de eerste puls is die in elk ontvangerframe wordt verzonden. PWM_read() gebruikt dezelfde vlaggen als RC_decode(CH), dus zorg ervoor dat PWM_read() eerst wordt aangeroepen.
Zie de screenshot hieronder:
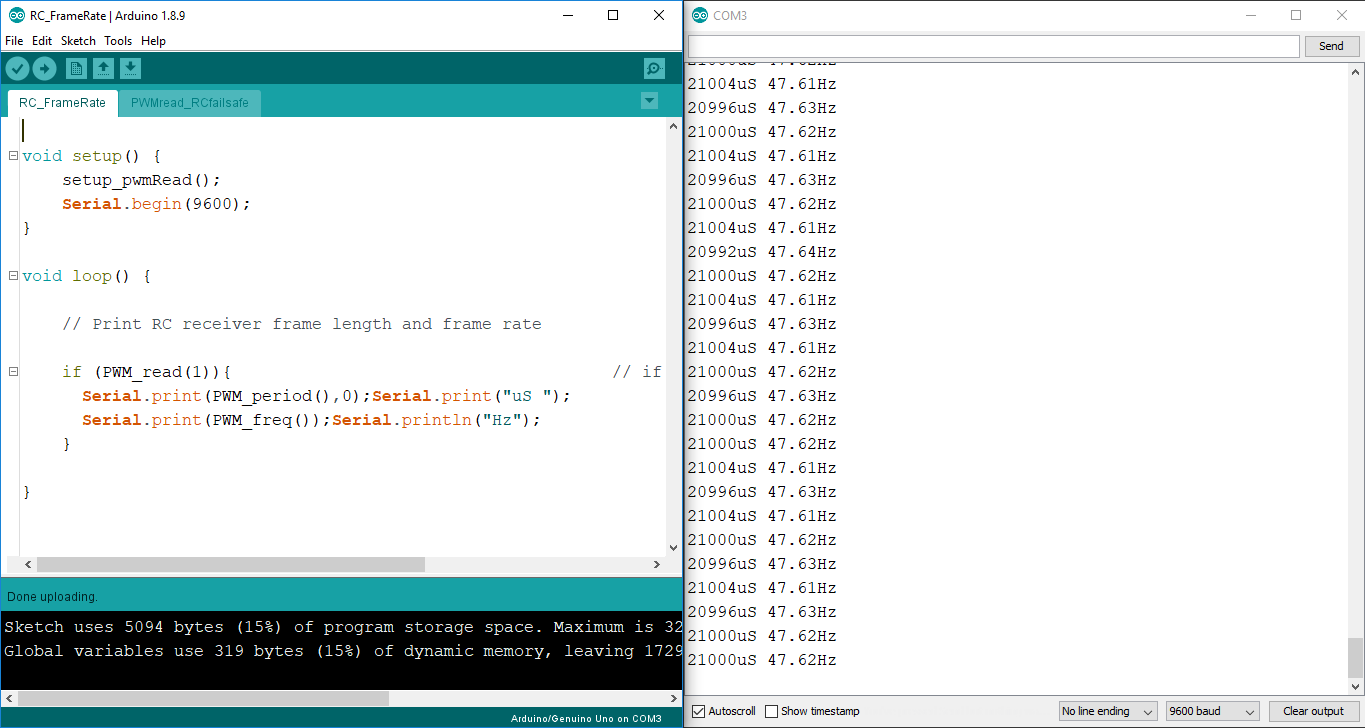
De ontvangstperiode kan handig zijn om te weten, omdat deze u vertelt hoeveel tijd de code heeft voordat de volgende set gegevens arriveert. Als RC_avail() geen nieuwe RC-gegevens detecteert na een vooraf bepaalde tijd, dwz 21 ms, voer dan RC_decode() uit om de fail-safe te activeren en/of om het programma (wat een PID-controller zou kunnen zijn) op een constante frequentie te laten lopen.
Dit wordt bereikt in de RC_Read_Example.ino door het volgende if-statement.
nu =millis();if(RC_avail() || nu - rc_update> 21) rc_update =nu; // update RC-invoergegevens met behulp van RC_decode() // voer een PID-controller uit // pas servomenging toe // positioneer de servo's}
Voorbeeld servomenging
Ik heb RC_ServoMixer_Example.ino toegevoegd om te laten zien hoe je twee ontvangerkanalen kunt mixen (in dit geval kanalen 2 en 3, lift en rolroer). De schets toont ook een methode voor het instellen van servorichting, snelheid en subtrim. De servobibliotheek wordt gebruikt om de servo's aan te sturen via pin 9 en 10.
Hieronder is een schermafbeelding van het servo-menggedeelte van de code:
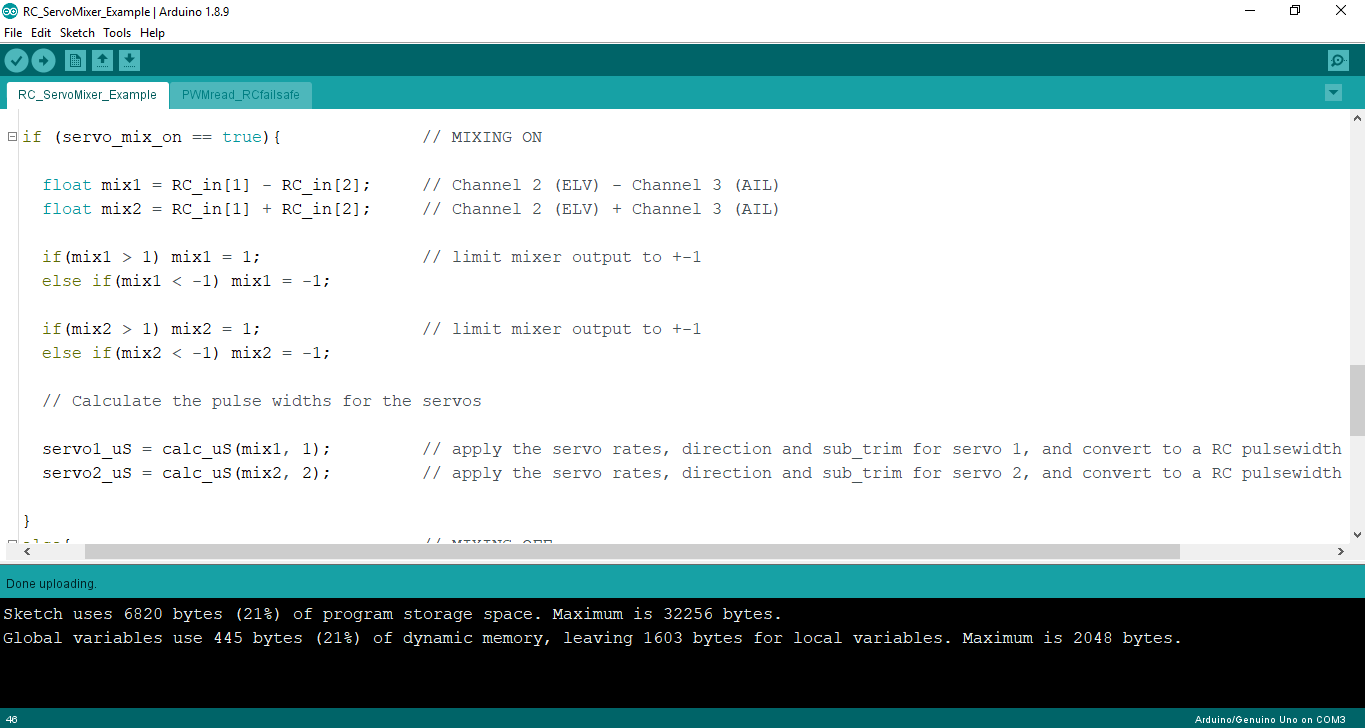
De mix wordt bereikt door simpelweg de twee kanalen bij elkaar op te tellen en af te trekken, en de output te beperken tot het bereik -1 tot +1. Bij het toepassen van lift- en rolroermenging creëer je twee uitgangen één voor elke servo.
mix1 =kanaal 2 - kanaal3 (elv - ail)
mix2 =kanaal 2 + kanaal3 (elv - ail)
Voordat u de servo's plaatst, moet u het +-100% (+-1) signaal converteren naar een equivalente pulsbreedte in microseconden voor de servo. In de RC_ServoMixer_Example.ino gebruik ik een functie calc_uS() om dit te doen. Deze functie wordt onderaan de schets geplaatst en wordt weergegeven in de onderstaande schermafbeelding.
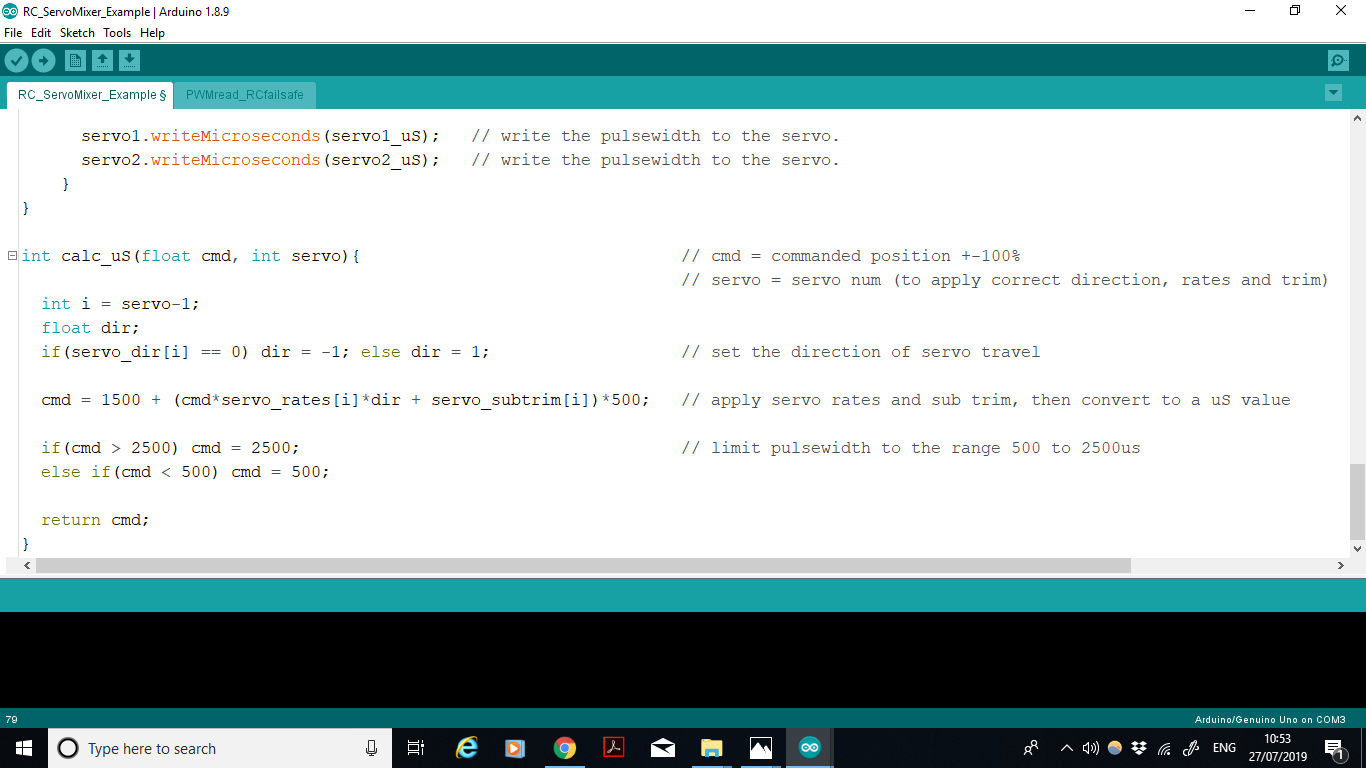
De richting, snelheid en subtrim die voor elke servo zijn gespecificeerd, worden gebruikt om een geschikte pulsbreedte voor de servo te berekenen.
De standaard neutrale puls is 1500uS en het normale bereik aan weerszijden van de neutraal is +-500uS. Dit geeft een minimale pulsbreedte van 1000uS (-100%) en een maximale pulsduur van 2000uS (+100%). De puls met toegepaste frequenties, richting en subtrim kan daarom als volgt worden berekend.
puls, uS =1500 + (servo_position_% * tarieven * richting + subtrim) * 500
De servorichting, snelheid en subtrim kunnen statisch zijn of dynamisch worden gewijzigd door de schets als reactie op een invoer van een ander ontvangerkanaal of op een andere manier.
Rationale voor de gekozen aanpak
Het is mogelijk om een RC-ontvanger te lezen met behulp van de pulseIn(PIN, HIGH)-functie, maar pulseIn() blokkeert de code in loop() terwijl het wacht tot een puls begint en vervolgens eindigt, waardoor kostbare verwerkingstijd wordt verspild. Als er meer dan één invoer is, kunnen ook gegevens verloren gaan.
Voor snelheid is het het beste om de pin change interrupt-functie van de Arduino te gebruiken, samen met directe poortmanipulatie, zodat de code in loop() met een minimum aan vertraging kan worden uitgevoerd. Dit is echter ingewikkelder en tijdrovender dan het simpelweg aanroepen van pulseIn(PIN, HIGH).
Daarom wilde ik de voordelen van beide werelden benutten door een generieke code te schrijven die ik tussen projecten kan verplaatsen. Het enige dat nodig is, is het kopiëren en plakken van een.ino-bestand (met de functies en onderbrekingsroutines) in de hoofdmap van de schets, de invoerpinnen specificeren en vervolgens de functies in de schets gebruiken.
Beperkingen
De micros()functie
De microseconde timing op de Arduino wordt uitgevoerd met behulp van de micros() functie. Deze functie telt in stappen van 4uS. Dit betekent dat we een nauwkeurigheidsniveau van 4 microseconden hebben wanneer we de 1000-2000uS-pulsen meten. Praktisch gezien is dit meer dan voldoende.
Indien gewenst is het mogelijk om deze resolutie te verbeteren tot 0.5uS door gebruik te maken van timer interrupts. zie onderstaande link:
https://www.instructables.com/id/How-to-get-an-Arduino-micros-function-with-05us-pr/
Efficiëntie van PWMread_RCfailsafe.ino
Als je PWMread_RCfailsafe.ino gebruikt om een 6- of 9-kanaals ontvanger te lezen, wordt 1,4-2,0% van de verwerkingstijd besteed aan het uitvoeren van de onderbrekingsroutines voor het wijzigen van de pin, wat volgens mij meer dan acceptabel is.
Het is echter altijd te goed om de beperkingen van de code te begrijpen en hoe deze indien nodig kan worden versneld.
Hieronder vindt u een lijst met de tijd die nodig is om elke ISR uit te voeren, afhankelijk van het aantal geselecteerde ingangskanalen.
1 kanaal <8uS
2 kanalen <12uS
3 kanalen <16uS
4 kanalen <20uS
5 kanalen <20uS
6 kanalen <24uS
Opmerking: hoe meer kanalen er worden gebruikt, hoe langer elke ISR duurt. Dit komt omdat een for-lus door elk kanaal loopt telkens wanneer de ISR wordt aangeroepen.
Deze extra tijd (inefficiëntie) is te verwaarlozen bij het meten van laagfrequente (d.w.z. 50 hz) RC-signalen.
Bovendien kost het ~4uS om een ISR in en uit te gaan. Voor één puls loopt de ISR twee keer, een keer aan het begin van een puls (LAAG naar HOOG) en dan nog een keer aan het einde (HOOG naar LAAG).
De tijd die nodig is om 1 puls te meten bij gebruik van 6 RC-ingangen is
2 * (4us om ISR in te voeren + 24uS om ISR uit te voeren) =2 * 28 =48uS.
Opmerking: dit is de minimale pulsduur die gemeten kan worden.
De tijd die nodig is om alle 6 kanalen te lezen is 288uS (6 * 48uS)
Ervan uitgaande dat de herhalingsperiode van de ontvanger 20 milliseconden is, zal de interrupt gedurende 1,44% (0,000288/0,02) van de tijd actief zijn. Dit is aanzienlijk beter dan het gebruik van de pulseIn()-functie. pulseIn() zou de code maximaal 20 milliseconden per pin blokkeren.
Ter info: als de Arduino slechts 2 RC-ingangen had, zal de ISR slechts 0,16% van de tijd werken (0.000032/0.02)
Maximale praktische frequentie (Hz)
Als u deze code voor een ander doel gebruikt, zou ik willen voorstellen dat de maximale praktische frequentie 2,5 kHz is. Dit geeft 100 stappen resolutie van de micros() functie (+- 0.025kHz).
Bij gebruik van één ingangspin op deze frequentie wordt 3% van de tijd in de onderbreking doorgebracht, wat betekent dat de minimale belasting die kan worden gemeten 0,03 is. Dit komt overeen met een minimale puls van 12uS.
Voor hogere frequenties herschrijft u de ISR zodat deze bij uw toepassing past.
Code
- PWMread_RCfailsafe
- RC_Read_Example
- RC_FrameRate
- RC_ServoMixer_Example
PWMread_RCfailsafeArduino
Dit .ino-bestand bevat de functies en pin change interrupt-routines (ISR) die worden gebruikt om een RC-ontvanger te decoderen en een fail-safe toe te passen als het zendersignaal wegvalt. Kopieer en plak dit bestand in dezelfde map als de hoofdschets (wanneer u de schets opent, verschijnt deze code als een tweede tabblad in de arduino IDE). Volg daarna de instructies in het bestand./* Kelvin Nelson 24/07/2019 * * Pulsbreedtemodulatie (PWM)-decodering van RC-ontvanger met failsafe * * Deze code bevat eenvoudig te gebruiken functies om blokgolfsignalen te meten op elk arduiuno pro mini, nano of uno pinnen, exclusief A6 en A7. * De code is bedoeld voor gebruik met RC-ontvangers, maar kan ook worden gebruikt in de meeste andere PWM-meettoepassingen als een directe vervanging voor pulseIn(PIN, HIGH). * (tot op heden is het niet getest op een frequentie hoger dan 1khz of op een Arduino mega) * * Een RC-signaalpuls kan worden omgezet van een pulsduur (1000-2000uS) op elke ingangspin in een -+100 % (-+1,0) uitvoer voor gebruik in een schets. * De kalibratie voor deze conversie plus een failsafe-instelling kan voor elk kanaal worden ingesteld. (fail safe toleranties 10-330Hz en 500-2500uS). ** De onbewerkte gegevens voor elke pin kunnen ook worden geëxtraheerd, d.w.z. pulstijd, pulsbreedte, framelengte, taak en frequentie. * * Set-up is snel, de organisatie van dit bestand is als volgt:* * - Overzicht van de code * - Lijst met functies * - Hoe te gebruiken, inclusief voorbeeldschetsen * - Door de gebruiker gedefinieerde variabelen -> specificeer invoerpinnen, zender kalibratie en failsafe. * - Globale variabelen en functies * * OVERZICHT VAN DE CODE:* * De code maakt pinwisselonderbrekingen op de geselecteerde pinnen mogelijk door de juiste registers in te stellen. * * Een spanningsverandering op een van de geselecteerde pinnen zal een van de drie Interrupt Service Routines activeren, afhankelijk van tot welk register de pin behoort. * - ISR(PCINT0_vect), ISR(PCINT1_vect) of ISR(PCINT2_vect) * * Binnen elke ISR bepaalt de code welke pin is gewijzigd, en noteert hij de tijd voordat hij terugkeert naar de hoofdlus(). * * De tijdsintervallen tussen pinwisselingen worden gebruikt om de pulsbreedte en framelengte te berekenen. * * Vlaggen worden ingesteld door de ISR om aan te geven wanneer nieuwe pulsen worden ontvangen. * * De vlaggen worden vervolgens gebruikt om de door elke ISR verzamelde gegevens te extraheren en te verwerken. * * Hoewel het niet precies hetzelfde is, volgt deze code soortgelijke principes als de principes die in deze video worden uitgelegd:https://youtu.be/bENjl1KQbvo * */// LIJST VAN FUNCTIES:// UITVOERTYPE NAAM VAN FUNCTIE OPMERKINGEN// void setup_pwmRead() initialiseer de PWM-meting met behulp van pin change interrupts// RC RECEIVER DECODING// boolean RC_avail() retourneert een HIGH wanneer nieuwe RC-gegevens beschikbaar zijn// float RC_decode (kanaalnummer) decodeert het geselecteerde RC-kanaal in het bereik +-100 %, en past een failsafe toe.// void print_RCpwm() Drukt de onbewerkte gegevens van het RC-kanaal af naar de seriële poort (gebruikt voor kalibratie).// GENERIC PWM MEASUREMENTS// boolean PWM_read (kanaalnummer) geeft een HOOG wanneer een nieuwe puls is ontvangen gedetecteerd op een bepaald kanaal. // De functie slaat de pulsgegevens op naar variabelen buiten de interruptroutines// en moet worden aangeroepen net voordat de rest van de PWM-functies wordt gebruikt.// unsigned long PWM_time() geeft de tijd aan het begin van de puls terug // float PWM() geeft de pulsbreedte terug// float PWM_period() geeft de tijd tussen pulsen terug// float PWM_freq() berekent de frequentie// float PWM_duty() berekent de duty// OPMERKING:PWM_read(CH) en RC_decode(CH) gebruiken dezelfde vlaggen om te detecteren wanneer nieuwe gegevens beschikbaar zijn, wat betekent dat gegevens verloren kunnen gaan als beide tegelijkertijd op hetzelfde kanaal worden gebruikt.// SUGESTIE:als u PWM_read(CH) wilt gebruiken om de framesnelheid van een RC-kanaal te vinden, noem het dan voor RC_decode(CH). De uitvoer van RC_decode(CH) wordt dan standaard de failsafe.// GEBRUIKSAANWIJZING, inclusief voorbeeldschetsen// onder de titel "USER DEFINED VARIABLES" in de onderstaande code://// Stap 1:voer de invoerpinnen in in de array pwmPIN[] ={}. //// - Elk aantal pinnen kan worden ingevoerd in pwmPIN[] (pinnen beschikbaar 0 - 13 en A0 - A5)// - De pinnen hoeven niet in numerieke volgorde te staan, bijvoorbeeld pwmPIN[] ={A0, 5,6,10,8} voor 5 kanalen, of pwmPIN[] ={A0,5} voor 2 kanalen// - Het eerste element in de array is het pinnummer voor "kanaal 1", en het tweede is de pin nummer voor "kanaal 2"... etc.// - Alle pinnen die op de RC-ontvanger zijn aangesloten, moeten aan het begin van de array zijn. dwz de eerste 2 kanalen kunnen RC-ingangen zijn en het 3e kanaal kan worden aangesloten op een ander apparaat zoals de echo-pin van een ultrasone sensor.//// Stap 2:als een RC-ontvanger is aangesloten op alle ingangen, stel dan RC_inputs in op 0, zo niet specificeer het aantal kanalen dat op de ontvanger is aangesloten, dwz RC_inputs =2;//// Stap 3:kalibreer uw zender door een eenvoudige schets te uploaden met dit .ino-bestand in de schetsmap, en druk de onbewerkte PWM-waarden af naar serieel (of kopieer en plak de benodigde functies in de schets).// Gebruik de informatie van de seriële monitor om handmatig de waarden in de arrays RC_min[], RC_mid[], RC_max[] aan te passen aan uw zender (gebruik volledige snelheden om de beste resolutie krijgen). // een voorbeeldschets voor het afdrukken van de PWM-gegevens van het RC-kanaal naar serieel. /* void setup() { setup_pwmRead(); Serieel.begin(9600); } void loop() { if(RC_avail()) print_RCpwm(); } */// Stap 4:Kies een failsafe-positie voor elk kanaal, in het bereik van -1,0 tot +1,0, en voer deze in in de array RC_failsafe[] ={}// Opmerking:als u wilt dat de arduino reageert op het verlies van het zendersignaal moet u mogelijk de failsafe-functie op uw ontvanger uitschakelen (als deze er een heeft).// een voorbeeldschets om de werking van de failsafe te controleren en voor het afdrukken van de gekalibreerde kanalen naar serieel:/* unsigned long now; // timingvariabelen om gegevens regelmatig bij te werken unsigned long rc_update; const int kanalen =6; // specificeer het aantal ontvangerkanalen float RC_in [kanalen]; // een array om de gekalibreerde invoer van receiver void setup () { setup_pwmRead (); Serieel.begin(9600); } void loop() { now =millis(); if(RC_avail() || now - rc_update> 25){ // als RC-gegevens beschikbaar zijn of 25 ms is verstreken sinds de laatste update (aanpassen aan framesnelheid van ontvanger) rc_update =nu; //print_RCpwm(); // uncommment om onbewerkte gegevens van ontvanger naar serieel af te drukken voor (int i =0; i=0 &&pwmPIN[i] <=7) pwmPIN_port[i] =2; // pin behoort tot PCINT2_vect (POORT D) else if (pwmPIN[i]>=8 &&pwmPIN[i] <=13) pwmPIN_port[i] =0; // pin hoort bij PCINT0_vect (POORT B) // verbergt het pinnummer (d.w.z. pin 11 of pin A0) naar de pinpositie in het poortregister. Er is hoogstwaarschijnlijk een betere manier om dit te doen met behulp van een macro... // (Het rechtstreeks lezen van de pinstatus uit de poortregisters versnelt de code in de ISR) if(pwmPIN[i] ==0 || pwmPIN[i ] ==A0 || pwmPIN[i] ==8) pwmPIN_reg[i] =0b00000001; else if(pwmPIN[i] ==1 || pwmPIN[i] ==A1 || pwmPIN[i] ==9) pwmPIN_reg[i] =0b00000010; else if(pwmPIN[i] ==2 || pwmPIN[i] ==A2 || pwmPIN[i] ==10) pwmPIN_reg[i] =0b00000100; else if(pwmPIN[i] ==3 || pwmPIN[i] ==A3 || pwmPIN[i] ==11) pwmPIN_reg[i] =0b00001000; else if(pwmPIN[i] ==4 || pwmPIN[i] ==A4 || pwmPIN[i] ==12) pwmPIN_reg[i] =0b00010000; else if(pwmPIN[i] ==5 || pwmPIN[i] ==A5 || pwmPIN[i] ==13) pwmPIN_reg[i] =0b00100000; anders if(pwmPIN[i] ==6) pwmPIN_reg[i] =0b01000000; anders if(pwmPIN[i] ==7) pwmPIN_reg[i] =0b10000000; }}// SETUP VAN PIN WIJZIGING INTERRUPTSvoid setup_pwmRead(){ for(int i =0; i num_ch) RC_inputs =num_ch; // definieer het aantal pinnen dat is aangesloten op een RC-ontvanger. } // INTERRUPT SERVICE ROUTINES (ISR) GEBRUIKT OM PWM INPUT TE LEZEN// de PCINT0_vect (B-poortregister) reageert op eventuele wijzigingen op pinnen D8-13.// de PCINT1_vect (C-poortregister) "" "" A0-A5. // de PCINT2_vect (D-poortregister) "" "" D0-7.// poortregisters worden gebruikt om if-statements in ISR-code te versnellen:// https://www.arduino.cc/en/Reference/PortManipulation http ://tronixstuff.com/2011/10/22/tutorial-arduino-port-manipulation/// http://harperjiangnew.blogspot.co.uk/2013/05/arduino-port-manipulation-on-mega-2560 .html// READ INTERRUPTS ON PINS D8-D13:ISR routine detects which pin has changed, and returns PWM pulse width, and pulse repetition period.ISR(PCINT0_vect){ // this function will run if a pin change is detected on portB pciTime =micros(); // Record the time of the PIN change in microseconds for (int i =0; i RC_inputs) return 0; // if channel number is out of bounds return zero. int i =CH - 1; // determine the pulse width calibration for the RC channel. The default is 1000, 1500 and 2000us. int Min; if(CH <=size_RC_min) Min =RC_min[CH-1]; else Min =1000; int Mid; if(CH <=size_RC_mid) Mid =RC_mid[CH-1]; else Mid =1500; int Max; if(CH <=size_RC_max) Max =RC_max[CH-1]; else Max =2000; float CH_output; if(FAILSAFE(CH) ==HIGH){ // If the RC channel is outside of failsafe tolerances (10-330hz and 500-2500uS) if(CH> size_RC_failsafe) CH_output =0; // and if no failsafe position has been defined, set output to neutral else CH_output =RC_failsafe[i]; // or if defined set the failsafe position } else{ // If the RC signal is valid CH_output =calibrate(PW[i],Min,Mid,Max); // calibrate the pulse width to the range -1 to 1. } return CH_output; // The signal is mapped from a pulsewidth into the range of -1 to +1, using the user defined calibrate() function in this code. // 0 represents neutral or center stick on the transmitter // 1 is full displacement of a control input is one direction (i.e full left rudder) // -1 is full displacement of the control input in the other direction (i.e. full right rudder)}/* * Receiver Calibration */ // NEED TO SPEED UPfloat calibrate(float Rx, int Min, int Mid, int Max){ float calibrated; if (Rx>=Mid) { calibrated =map(Rx, Mid, Max, 0, 1000); // map from 0% to 100% in one direction } else if (Rx ==0) { calibrated =0; // neutral } else { calibrated =map(Rx, Min, Mid, -1000, 0); // map from 0% to -100% in the other direction } return calibrated * 0.001;}// Basic Receiver FAIL SAFE// check for 500-2500us and 10-330Hz (same limits as pololu)boolean FAILSAFE(int CH){ int i =CH-1; boolean failsafe_flag =LOW; if(pwmFlag[i] ==1) // if a new pulse has been measured. { pwmFlag[i] =0; // set flag to zero if(pwmPeriod[i]> 100000) // if time between pulses indicates a pulse rate of less than 10Hz { failsafe_flag =HIGH; } else if(pwmPeriod[i] <3000) // or if time between pulses indicates a pulse rate greater than 330Hz { failsafe_flag =HIGH; } if(PW[i] <500 || PW[i]> 2500) // if pulswidth is outside of the range 500-2500ms { failsafe_flag =HIGH; } } else if (micros() - pwmTimer[i]> 100000) // if there is no new pulswidth measurement within 100ms (10hz) { failsafe_flag =HIGH; } return failsafe_flag; }/* * Quick print function of Rx channel input */void print_RCpwm(){ // display the raw RC Channel PWM Inputs for (int i =0; i =0) Serial.print(" "); if (abs(pc) <100) Serial.print(" "); if (abs(pc) <10) Serial.print(" "); Serial.print(" ");Serial.print(pc);Serial.print("% ");}/* * GENERIC PWM FUNCTIONS */unsigned long pin_time;float pin_pwm;float pin_period;boolean PWM_read(int CH){ if(CH <1 &&CH> num_ch) return false; int i =CH-1; boolean avail =pwmFlag[i]; if (avail ==HIGH){ pwmFlag[i] =LOW; noInterrupts(); pin_time =pwmTimer[i]; pin_pwm =PW[i]; pin_period =pwmPeriod[i]; onderbreekt(); } return avail;}unsigned long PWM_time(){return pin_time;}float PWM_period(){return pin_period;}float PWM(){return pin_pwm;}float PWM_freq(){ float freq; return freq =1000000 / pin_period; // frequency Hz}float PWM_duty(){ float duty; duty =pin_pwm/pin_period; return duty;} RC_Read_ExampleArduino
An example sketch used to display raw data in order to calibrate your RC receiver and set your the fail safe. The PWMread_RCfailsafe.ino file should be copied into the same folder in order for the functions to be available.unsigned long now; // timing variables to update data at a regular interval unsigned long rc_update;const int channels =6; // specify the number of receiver channelsfloat RC_in[channels]; // an array to store the calibrated input from receiver void setup() { setup_pwmRead(); Serial.begin(9600);}void loop() { now =millis(); if(RC_avail() || now - rc_update> 25){ // if RC data is available or 25ms has passed since last update (adjust to be equal or greater than the frame rate of receiver) rc_update =now; print_RCpwm(); // uncommment to print raw data from receiver to serial for (int i =0; i RC_FrameRateArduino
Example sketch that prints the frame rate and frequency of an RC Receiver. The PWMread_RCfailsafe.ino file should be copied into the same folder in order for the functions to be available.void setup() { setup_pwmRead(); Serial.begin(9600);}void loop() { // Print RC receiver frame length and frame rate if (PWM_read(1)){ // if a new pulse is detected on channel 1 Serial.print(PWM_period(),0);Serial.print("uS "); Serial.print(PWM_freq());Serial.println("Hz"); }} RC_ServoMixer_ExampleArduino
An servo mixing example. Two channels from a 6 channel are receiver are mixed and sent to two servos controlled using the servo library. The PWMread_RCfailsafe.ino file should be copied into the same folder in order for the functions to be available.// servo variables#include // include the servo library to control the servosServo servo1; // name each servo output for use with the servo library Servo servo2; // Each servo must be attached to a pin that has a PWM output// on the arduino uno, nano and pro mini these pins are 3, 5, 6, 9, 10 and 11const int servo1_pin =9; // identify the pins that each servo signal wire is connected toconst int servo2_pin =10;// Select Servo Direction, Rates and Sub-trim (the size of each array must match the number of servos)boolean servo_dir[] ={0,1}; // Direction:0 is normal, 1 is reversefloat servo_rates[] ={1,0.5}; // Rates:range 0 to 2 (1 =+-500us (NORMAL), 2 =+-1000us (MAX)):The amount of servo deflection in both directionsfloat servo_subtrim[] ={0.0,0.0}; // Subtrimrange -1 to +1 (-1 =1000us, 0 =1500us, 1 =2000us):The neutral position of the servoboolean servo_mix_on =true;unsigned long now; // timing variables to update data at a regular interval unsigned long rc_update;// Receiver variablesconst int channels =6; // specify the number of receiver channelsfloat RC_in[channels]; // an array to store the calibrated input from receiver void setup() { servo1.attach(servo1_pin, 500, 2500); // attach the servo library to each servo pin, and define min and max uS values servo2.attach(servo2_pin, 500, 2500); setup_pwmRead(); Serial.begin(9600);}void loop() { now =millis(); if(RC_avail() || now - rc_update> 25){ // if RC data is available or 25ms has passed since last update (adjust to> frame rate of receiver) rc_update =now; print_RCpwm(); // uncommment to print raw data from receiver to serial for (int i =0; i 1) mix1 =1; // limit mixer output to +-1 else if(mix1 <-1) mix1 =-1; if(mix2> 1) mix2 =1; // limit mixer output to +-1 else if(mix2 <-1) mix2 =-1; // Calculate the pulse widths for the servos servo1_uS =calc_uS(mix1, 1); // apply the servo rates, direction and sub_trim for servo 1, and convert to a RC pulsewidth (microseconds, uS) servo2_uS =calc_uS(mix2, 2); // apply the servo rates, direction and sub_trim for servo 2, and convert to a RC pulsewidth (microseconds, uS) } else{ // MIXING OFF servo1_uS =calc_uS(RC_in[1],1); // apply the servo rates, direction and sub_trim for servo 1, and convert to a RC pulsewidth (microseconds, uS) servo2_uS =calc_uS(RC_in[2],2); // apply the servo rates, direction and sub_trim for servo 1, and convert to a RC pulsewidth (microseconds, uS) } servo1.writeMicroseconds(servo1_uS); // write the pulsewidth to the servo. servo2.writeMicroseconds(servo2_uS); // write the pulsewidth to the servo. }}int calc_uS(float cmd, int servo){ // cmd =commanded position +-100% // servo =servo num (to apply correct direction, rates and trim) int i =servo-1; float dir; if(servo_dir[i] ==0) dir =-1; else dir =1; // set the direction of servo travel cmd =1500 + (cmd*servo_rates[i]*dir + servo_subtrim[i])*500; // apply servo rates and sub trim, then convert to a uS value if(cmd> 2500) cmd =2500; // limit pulsewidth to the range 500 to 2500us else if(cmd <500) cmd =500; return cmd;}
Schema's
This RC Receiver is powered by 5v and ground from the ICSP pins with the 6 signal outputs connected to pins 2-7
Micro servo 1 is powered by 5v pin and ground, with signal wire connected to pin 9
Micro servo 2 powered by 3.3v pin and ground, with signal wired connected to pin 10 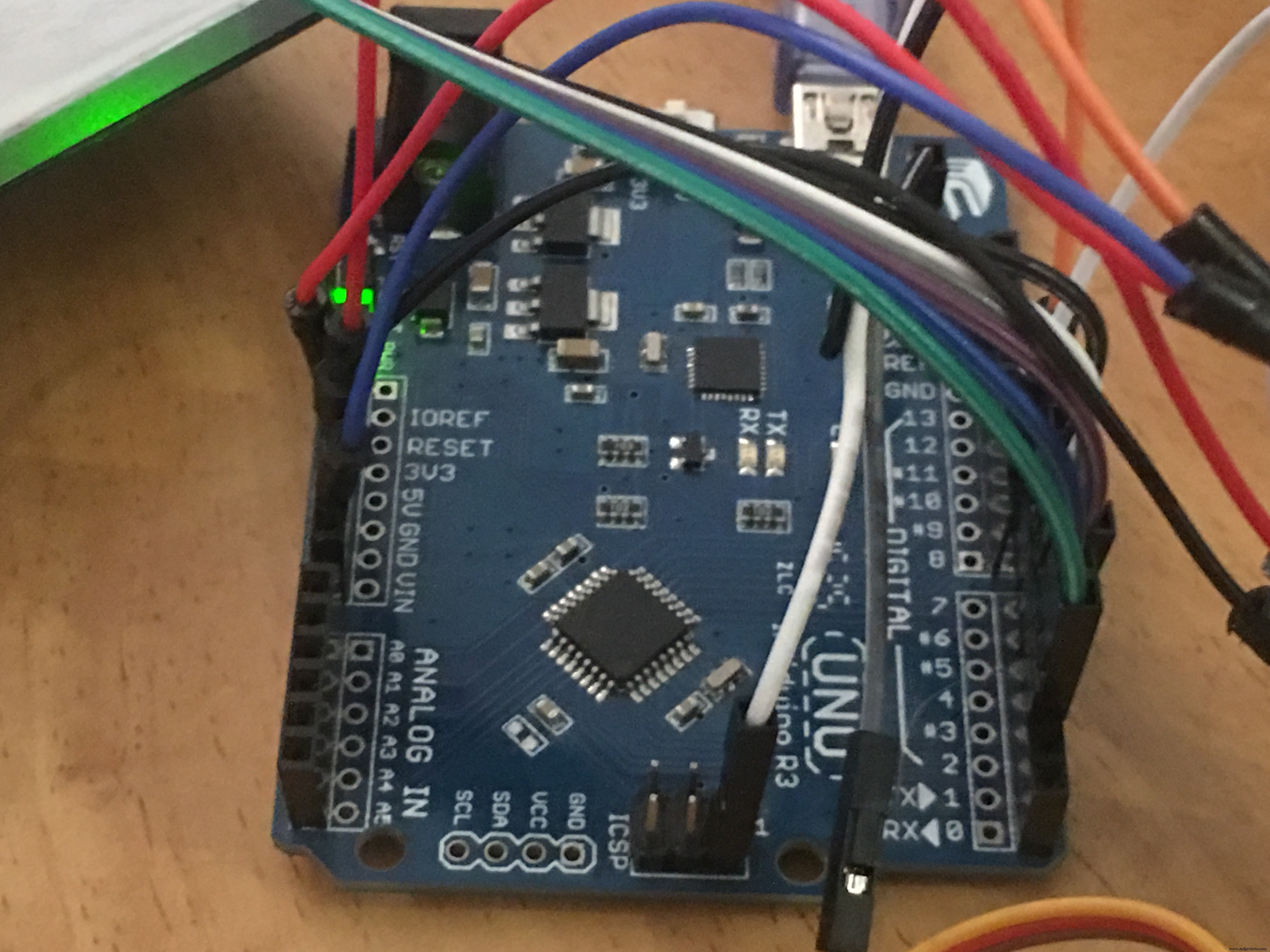
Productieproces
- C - Invoer en uitvoer
- LCD-animatie en gaming
- DIY voltmeter met Arduino en smartphone
- Temperatuur- en vochtigheidsdatalogger
- De temperatuur en vochtigheid op Blynk aflezen met DHT11
- Python3- en Arduino-communicatie
- Arduino en OLED-gebaseerde mobiele automaten
- FM-radio met Arduino en RDA8057M
- Arduino TEA5767 FM-radio-ontvanger
- Aanwezigheidssysteem op basis van Arduino en Google Spreadsheet
- Een geïsoleerde analoge ingang voor Arduino