


Arduino-gebaseerd waarschuwingssysteem voor botsingsdetectie
Componenten en benodigdheden
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 2 |
Over dit project
Dit is een op Arduino gebaseerd waarschuwingssysteem voor botsingsdetectie. Dit soort systeem is de snelst groeiende veiligheidsvoorziening in de auto-industrie. Een dergelijk systeem stelt voertuigen in staat om de kans op een aanrijding te identificeren en de bestuurder een visuele en geluidswaarschuwing te geven, zodat de bestuurder de nodige maatregelen kan nemen om een aanrijding te voorkomen. Dit projectidee is gebaseerd op een Arduino-controller en het hele project geeft je een heel goed begrip van hoe dit systeem werkt. De stap-voor-stap methode wordt uitgelegd zodat je dit systeem kunt maken. De hardware-aansluiting, pin-informatie en Arduino-programma wordt duidelijk uitgelegd.
Stap 1:Verzamel de volgende items
- Computer:dit is vereist om het programma en het flashprogramma naar de controller te schrijven. Je moet ook Arduino IDE installeren, die gratis beschikbaar is op de downloadsectie van de Arduino-website.
- Controller:ik heb een Arduino-microcontroller gebruikt. Dit kun je krijgen van een online verkoper zoals Amazon, enz.
- Sensor:ik heb de HR SC-04 ultrasone sensor gebruikt.
- Piezo-zoemer:ik heb de piëzo-zoemer gebruikt om de geluidswaarschuwing te maken.
- LED:er zijn twee kleuren LED die ik heb gebruikt - rood en blauw.
- Draden:jumperdraden zijn vereist om hardwareverbindingen te maken. U moet alle soorten jumperdraden gebruiken, zoals mannelijk-mannelijk, vrouwelijk-vrouwelijk en vrouwelijk-mannelijk.

Stap 2:Sluit alle hardware aan
De hardware die je in de eerste stap verzamelt, sluit ze nu allemaal via draden aan op de controller.
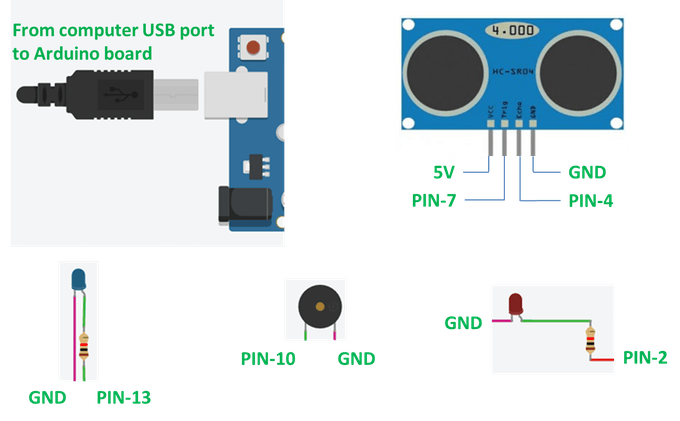
Sensor naar controller pin-informatie
De sensor heeft vier pinnen:VCC, Trig, Echo en GND. Verbinden:
- VCC-pin naar 5V op controller
- GND-pin naar GND op controller
- Trigeer pin naar pin-7 op controller
- Echo pin naar pin-4 op controller
Piezo-zoemer naar pin-informatie van de controller
Piezo-zoemer heeft twee pinnen:
- Sluit een pin aan op pin-10 op de controller
- Sluit een andere pin aan op GND op de controller
Rode LED naar pin-informatie van de controller
De rode LED heeft twee pinnen:
- Sluit een pin aan op pin-2 op de controller
- Sluit een andere pin aan op GND op de controller
Blauwe LED naar pin-informatie van de controller
De blauwe LED heeft twee pinnen:
- Sluit een pin aan op pin-13 op de controller
- Sluit een andere pin aan op GND op de controller
Informatie over de verbinding tussen controller en computer
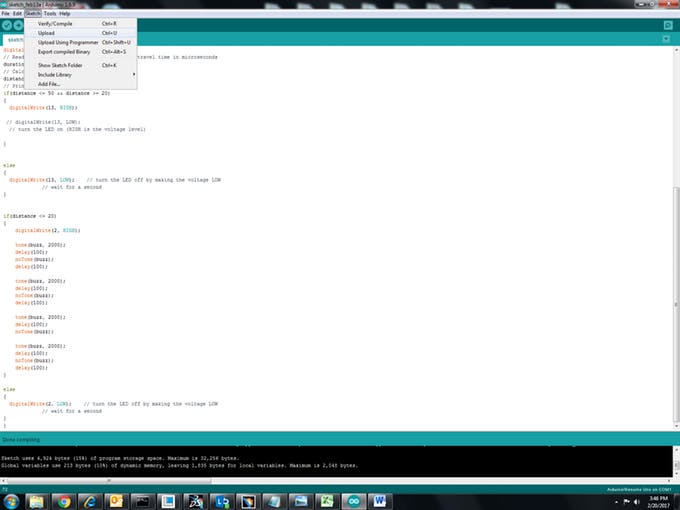
Je hebt een USB-datakabel die je krijgt bij het kopen van de Arduino. Met deze datakabel sluit je de computer aan op het Arduino board. Start nu Arduino IDE. Nadat u de computer hebt aangesloten, moet u het bord en de poort in het menu selecteren. Zie de bijgevoegde schermafbeelding voor hulp.
Stap 3:Schrijf het programma
In de vorige stap hebben we pin-informatie voor de hardware gedefinieerd. Nu, die informatie zullen we gebruiken om programma-instructies te schrijven. Start Arduino IDE en probeer het programma zelf te schrijven. Anders kunt u direct mijn programma gebruiken of het bijgevoegde .ino-formaat downloaden.
Bij het kopiëren van deze code moet je voorzichtig zijn, omdat sommige tekens die in het programma worden gebruikt, niet kunnen worden geplakt tijdens het schrijven op een bepaald medium. Het is beter om een bestand in .ino-indeling te downloaden.
////Collision Warning System//////// Jaar 2017 //////// Vijendra Kumar////const int trigPin =7;const int echoPin =4;int buzz =10;lange duur;int afstand;// de setup-functie wordt één keer uitgevoerd wanneer u op reset drukt of de boardvoid setup() aanzet {// initialiseer digitale pin 13 als een output.pinMode(trigPin, OUTPUT);pinMode(echoPin, INPUT);pinMode(13, OUTPUT);pinMode(2, OUTPUT);Serial.begin(9600);}// de lusfunctie wordt steeds opnieuw uitgevoerd forevervoid loop(){// Wist de trigPindigitalWrite(trigPin, LOW);delayMicroseconds(2);// Zet de trigPin op HIGH gedurende 10 microsecondendigitalWrite(trigPin, HIGH);delayMicroseconds(10);digitalWrite(trigPin, LOW);// Leest de echoPin, retourneert de reistijd van de geluidsgolf in microsecondenduur =pulseIn(echoPin, HIGH);// Berekening van de distancedistance=duration*0.034/2;// Print de afstand op de seriële monitorif(distance <=50 &&distance>=20){digitalWrite(13, HIGH);// digitalWrite(13, LOW);// zet de LED aan (HIGH is de spanning l evel)}anders{digitalWrite(13, LAAG); // schakel de LED uit door de spanning LAAG te maken// wacht een seconde}if(afstand <=20){digitalWrite(2, HOOG);tone(buzz, 2000);delay(100);noTone(buzz); delay(100);tone(buzz, 2000);delay(100);noTone(buzz);delay(100);tone(buzz, 2000);delay(100);noTone(buzz);tone(buzz, 2000);delay(100);noTone(buzz);delay(100);}else{digitalWrite(2, LOW); // schakel de LED uit door de spanning LAAG te maken// wacht een seconde}} 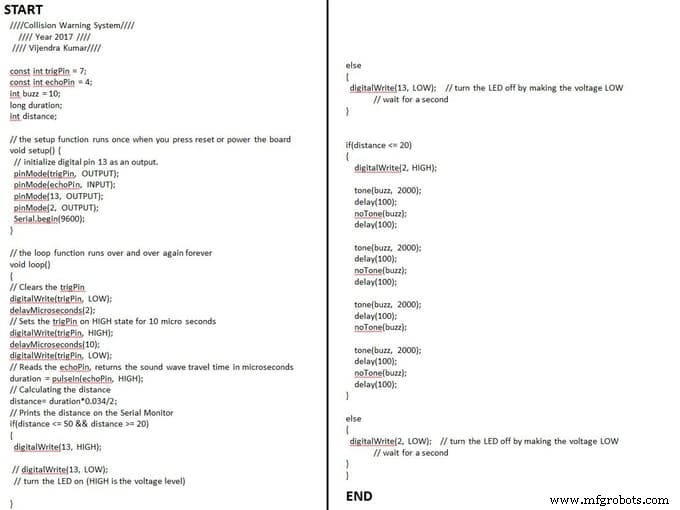
Stap 4:Flash het Arduino-bord
Nadat alle verbindingen zijn gemaakt, zijn we klaar om het programma naar het Arduino-bord te uploaden. Zie de bijgevoegde afbeelding ter referentie.
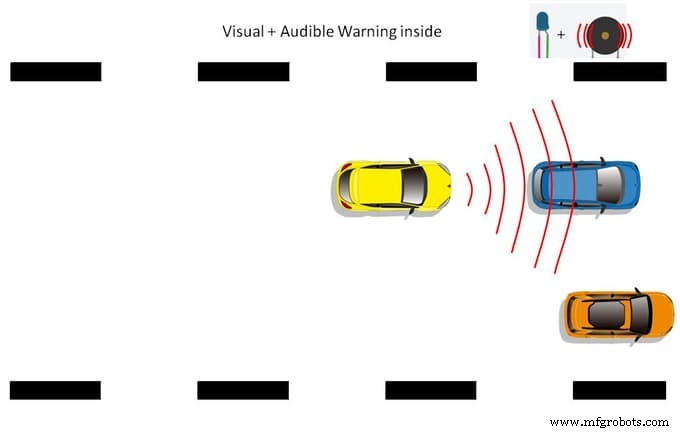
Stap 5:Hoe dit systeem werkt
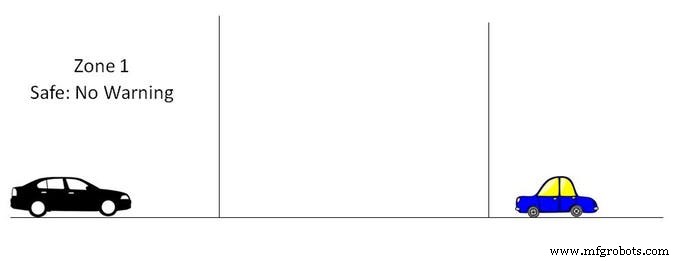
Ik zal je uitleggen hoe dit systeem werkt. Ik heb drie verschillende zones gedefinieerd:
- Zone 1:Geen waarschuwing
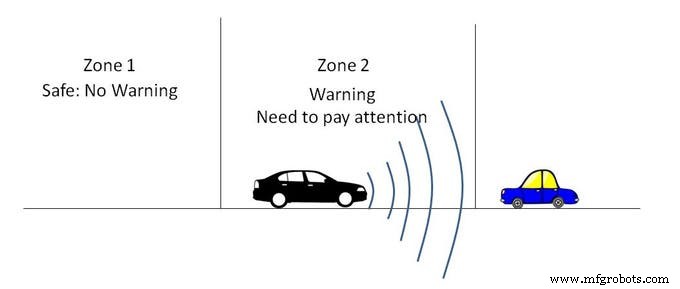
- Zone 2:Alleen visuele waarschuwing (in deze zone moet de bestuurder opletten)
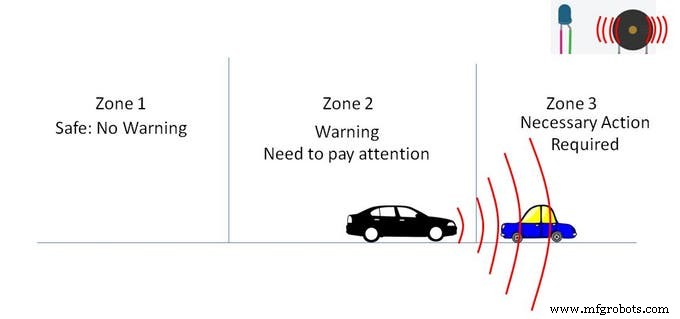
- Zone 3:Zowel visuele als audiowaarschuwing (bestuurder moet de nodige maatregelen nemen om een aanrijding te voorkomen)

Stap 6:Test je setup
Nu is het hele systeem klaar om te testen. Bekijk de bovenstaande video om te zien hoe u kunt controleren of het systeem werkt.
Code
- Op Arduino gebaseerd waarschuwingssysteem voor botsingsdetectie
Arduino-gebaseerd waarschuwingssysteem voor botsingsdetectie Arduino
U kunt deze code voor dit systeem gebruiken////Collision Warning System//// //// Jaar 2017 //// //// Vijendra Kumar//// const int trigPin =7;const int echoPin =4;int buzz =10;lange duur;int afstand;// de setup-functie wordt één keer uitgevoerd wanneer u op reset drukt of de boardvoid setup() aanzet {// initialiseer digitale pin 13 als een uitgang. pinMode (trigPin, UITGANG); pinMode (echoPin, INPUT); pinMode(13, UITGANG); pinMode(2, UITGANG); Serial.begin(9600);}// de lusfunctie wordt keer op keer uitgevoerd forevervoid loop() {// Wist de trigPindigitalWrite(trigPin, LOW);delayMicroseconds(2);// Zet de trigPin op HIGH voor 10 micro secondendigitalWrite(trigPin, HIGH);delayMicroseconds(10);digitalWrite(trigPin, LOW);// Leest de echoPin, retourneert de reistijd van de geluidsgolf in microsecondenduration =pulseIn(echoPin, HIGH);// Berekening van de afstand =duur*0.034 /2;// Drukt de afstand af op de seriële monitorif(distance <=50 &&distance>=20){ digitalWrite(13, HIGH); // digitalWrite (13, LAAG); // zet de LED aan (HIGH is het spanningsniveau)} else { digitalWrite (13, LOW); // schakel de LED uit door de spanning LAAG te maken // wacht een seconde }if(afstand <=20){digitalWrite(2, HIGH); toon (gezoem, 2000); vertraging (100); geen toon(gezoem); vertraging (100); toon (gezoem, 2000); vertraging (100); geen toon (gezoem); vertraging (100); toon (gezoem, 2000); vertraging (100); geen toon (gezoem); toon (gezoem, 2000); vertraging (100); geen toon (gezoem); vertraging(100);}anders{ digitalWrite(2, LAAG); // schakel de LED uit door de spanning LAAG te maken // wacht een seconde }} Aangepaste onderdelen en behuizingen
Gebruik deze pin-informatie. U kunt uw pincode wijzigen, maar in dat geval moet u ook de code wijzigen.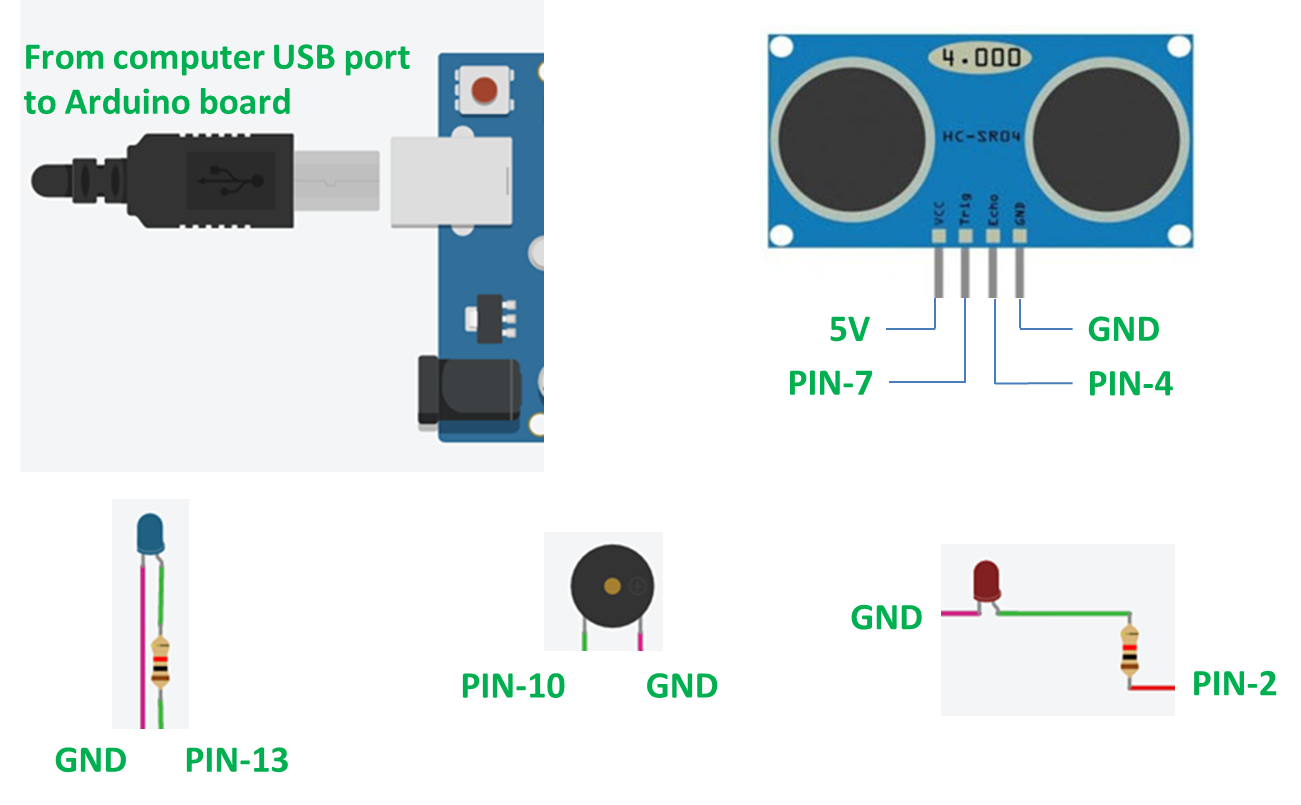
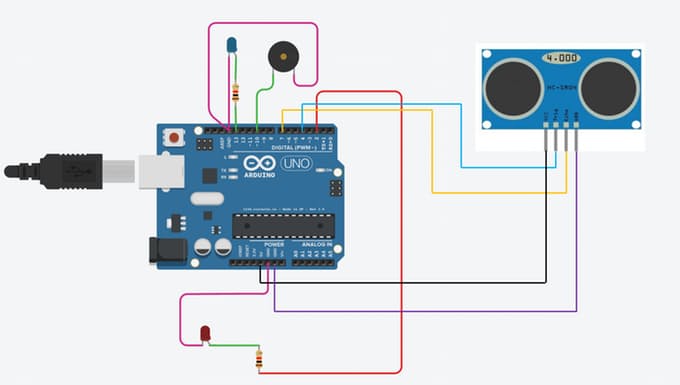
Schema's
Volg dit schema om hardware op bord- en pinnummers aan te sluiten.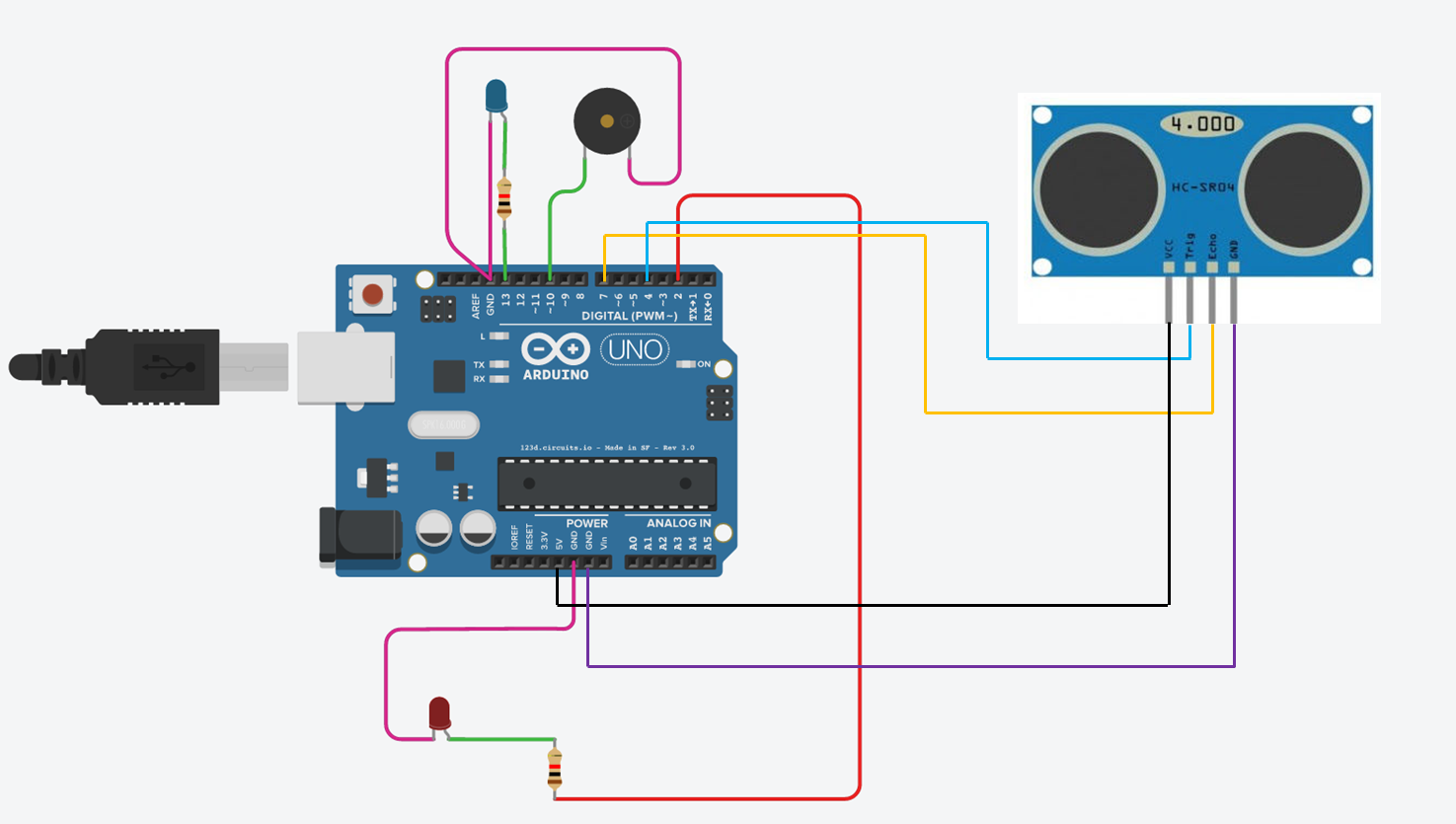
Productieproces
- Basissysteem voor inbraakdetectie
- Bewegingsdetectie-alarmsysteem
- Aanwezigheidssysteem met Arduino en RFID met Python
- Human Detection Robotics System met Arduino Uno
- Arduino Alarmsysteem:SERENA
- Automatisch plantenwatersysteem met Arduino
- Bosbrandbewakings- en detectiesysteem (met sms-waarschuwingen)
- Kelder/kruipruimte ventilatiesysteem
- Aanwezigheidssysteem op basis van Arduino en Google Spreadsheet
- Een valdetectiesysteem op basis van Arduino, Windows en Azure
- Arduino Fingerprint Attendance System met cloudgegevensopslag