


Wat is een PID-regelaar? Zijn typen, werking en toepassingen
PID-controllers – wat zijn het en hoe werken ze?
PID-controller is een meest algemeen regelalgoritme dat wordt gebruikt in industriële automatisering en toepassingen en meer dan 95% van de industriële regelaars is van het PID-type. PID-regelaars worden gebruikt voor een nauwkeurigere en nauwkeurigere regeling van verschillende parameters.
Meestal worden deze gebruikt voor het regelen van temperatuur, druk, snelheid, stroming en andere procesvariabelen. Vanwege de robuuste prestaties en functionele eenvoud zijn deze geaccepteerd door enorme industriële toepassingen waar een nauwkeurigere besturing de belangrijkste vereiste is. Laten we eens kijken hoe de PID-controller werkt ?
- Gerelateerde post:wat is een gedistribueerd besturingssysteem (DCS)?

Wat is een PID-controller?
Een combinatie van proportionele, integrale en afgeleide acties wordt vaker PID-actie genoemd en vandaar de naam PID (Proportioneel-integraal-derivaat) controller . Deze drie basiscoëfficiënten worden in elke PID-regelaar voor een specifieke toepassing gevarieerd om een optimale respons te krijgen.
Het haalt de invoerparameter van de sensor die de werkelijke procesvariabele wordt genoemd. Het accepteert ook de gewenste actuatoruitgang, waarnaar wordt verwezen als ingestelde variabele, en berekent en combineert vervolgens de proportionele, integrale en afgeleide reacties om de output voor de actuator te berekenen.
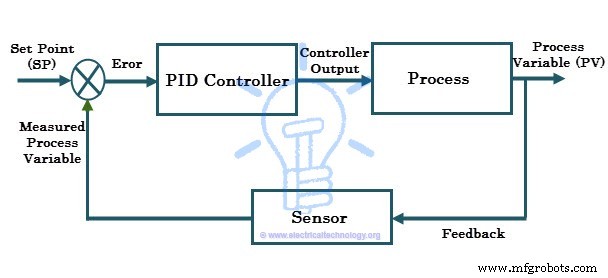
Beschouw het typische controlesysteem in bovenstaande afbeelding waarin de procesvariabele van een proces op een bepaald niveau moet worden gehouden. Neem aan dat de procesvariabele temperatuur (in Celsius) is. Om de procesvariabele (d.w.z. temperatuur) te meten, wordt een sensor gebruikt (laten we zeggen een RTD).
Een instelpunt is de gewenste reactie van het proces. Stel dat het proces op 80 graden Celsius moet worden gehouden, en dan is het instelpunt 80 graden Celsius. Neem aan dat de gemeten temperatuur van de sensor 50 graden Celsius is (wat niets anders is dan een procesvariabele), maar het temperatuurinstelpunt is 80 graden Celsius.
Deze afwijking van de werkelijke waarde van de gewenste waarde in het PID-regelalgoritme zorgt ervoor dat de output naar de actuator (hier is het een verwarming) wordt geproduceerd, afhankelijk van de combinatie van proportionele, integrale en afgeleide reacties. Dus de PID-regelaar varieert continu de output naar de actuator totdat de procesvariabele tot de ingestelde waarde daalt. Dit wordt ook wel terugkoppelingsregelsysteem met gesloten lus genoemd .
Gerelateerd bericht:
- Wat is AC Drive? Werking en soorten elektrische aandrijvingen en VFD
- Wat is DC-schijf? Werking en classificatie van DC-drives
Werking van PID-controller
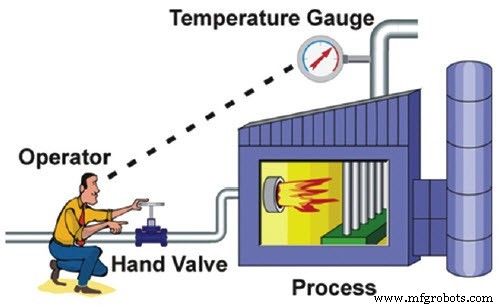
Bij handmatige bediening kan de operator periodiek de procesvariabele uitlezen (die moet worden geregeld, zoals temperatuur, stroom, snelheid, enz.) en de regelvariabele aanpassen (die te manipuleren om de regelvariabele op voorgeschreven limieten te brengen, zoals een verwarmingselement, stroomkleppen, motoringang, enz.). Aan de andere kant worden bij automatische besturing continu metingen en aanpassingen automatisch uitgevoerd.
Alle moderne industriële controllers zijn van het automatische type (of closed loop controllers), die meestal gemaakt zijn om één of een combinatie van besturingsacties te produceren. Deze controleacties omvatten
- AAN-UIT-controller
- Proportioneel controller
- Proportioneel-integraal regelaar
- Proportioneel afgeleide controller
- Proportional-Integral-Derivative Controller
In het geval van een AAN-UIT-regelaar zijn twee toestanden mogelijk om de gemanipuleerde variabele te regelen, d.w.z. ofwel volledig AAN (wanneer de procesvariabele onder het instelpunt is) of Volledig UIT ( wanneer de procesvariabele boven het instelpunt ligt). Dus de output zal van oscillerende aard zijn. Om de nauwkeurige regeling te bereiken, gebruiken de meeste industrieën de PID-controller (of PI of PD afhankelijk van de toepassing). Laten we eens kijken naar deze controleacties.
P-Controller
Proportioneel beheer of gewoon P-controller produceert de stuuruitgang evenredig met de huidige fout. Hier is de fout het verschil tussen het setpoint en de procesvariabele (d.w.z. e =SP – PV). Deze foutwaarde vermenigvuldigd met de proportionele versterking (Kc) bepaalt de uitgangsrespons, of met andere woorden de proportionele versterking bepaalt de verhouding tussen de proportionele uitgangsrespons en de foutwaarde.
De grootte van de fout is bijvoorbeeld 20 en Kc is 4, dan is de proportionele respons 80. Als de foutwaarde nul is, is de output of respons van de controller nul. De snelheid van de respons (transiënte respons) wordt verhoogd door de waarde van de proportionele versterking Kc te verhogen. Als Kc echter wordt verhoogd tot buiten het normale bereik, begint de procesvariabele met een hogere snelheid te oscilleren en dit zal instabiliteit van het systeem veroorzaken. 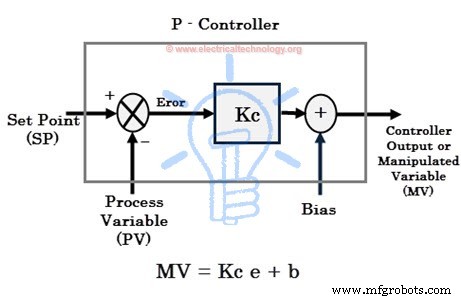
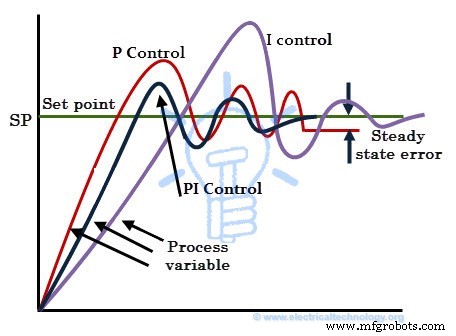
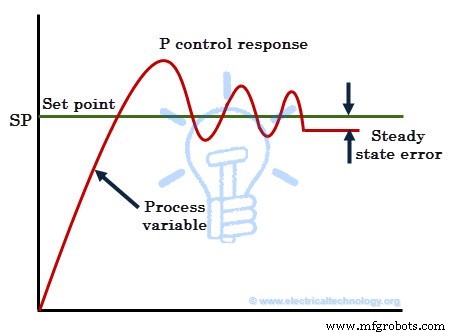 Hoewel P-controller stabiliteit van de procesvariabele biedt met een goede reactiesnelheid, zal er altijd een fout zijn tussen het setpoint en de actuele procesvariabele. In de meeste gevallen is deze controller voorzien van handmatige reset of biasing om de fout te verminderen wanneer deze alleen wordt gebruikt. Een nulfoutstatus kan echter niet worden bereikt door deze controller. Daarom zal er altijd een stationaire fout zijn in de reactie van de p-controller, zoals weergegeven in de afbeelding.
Hoewel P-controller stabiliteit van de procesvariabele biedt met een goede reactiesnelheid, zal er altijd een fout zijn tussen het setpoint en de actuele procesvariabele. In de meeste gevallen is deze controller voorzien van handmatige reset of biasing om de fout te verminderen wanneer deze alleen wordt gebruikt. Een nulfoutstatus kan echter niet worden bereikt door deze controller. Daarom zal er altijd een stationaire fout zijn in de reactie van de p-controller, zoals weergegeven in de afbeelding.
Verwante berichten:
- Wat is industriële automatisering | Soorten industriële automatisering
- Smart Home Automation-systeem - Circuit en broncode
I-Controller
- Integrale controller of I-controller wordt voornamelijk gebruikt om de stationaire fout van het systeem te verminderen. De integrale component integreert de foutterm gedurende een tijdsperiode totdat de fout nul wordt. Dit heeft tot gevolg dat zelfs een kleine foutwaarde een hoge integrale respons zal veroorzaken. Bij de nulfouttoestand houdt het de uitvoer naar het laatste regelapparaat op zijn laatste waarde om nul stabiele toestandsfout te behouden, maar in het geval van de P-controller is de uitvoer nul wanneer de fout nul is.
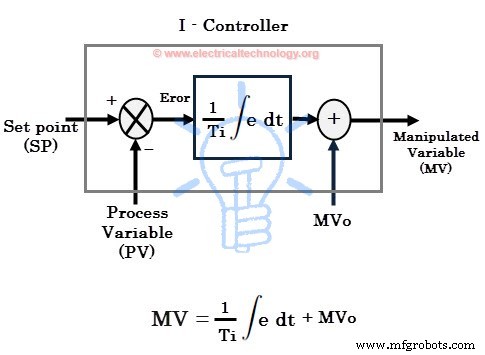
Als de fout negatief is, wordt de integrale respons of output verlaagd. De reactiesnelheid is traag (betekent langzaam reageren) wanneer alleen de I-controller wordt gebruikt, maar verbetert de steady-state-respons. Door de integrale versterking Ki te verlagen, wordt de reactiesnelheid verhoogd.
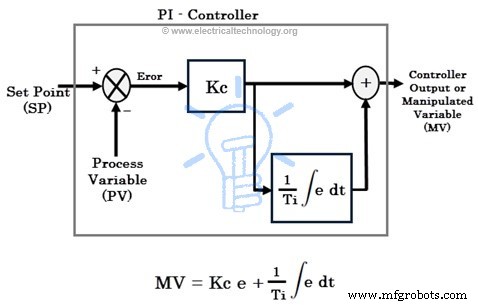
Voor veel toepassingen worden proportionele en integrale besturingen gecombineerd om een goede reactiesnelheid (in het geval van P-controller) en een betere stabiele respons (in het geval van I-controller) te bereiken. Meestal PI-controllers worden gebruikt in industriële operaties om zowel voorbijgaande als stationaire reacties te verbeteren. De reacties van alleen I-control, alleen p-control en PI-control worden weergegeven in onderstaande afbeelding .
Respons D-controller
Een afgeleide controller ( of gewoonD-Controller) ziet hoe snel procesvariabele verandert per tijdseenheid en produceert de output evenredig aan de snelheid van verandering. De afgeleide output is gelijk aan de veranderingssnelheid van de fout vermenigvuldigd met een afgeleide constante. De D-controller wordt gebruikt wanneer de processorvariabele met hoge snelheid begint te veranderen.
In dat geval beweegt de D-controller het laatste regelapparaat (zoals regelkleppen of motor) in een zodanige richting dat de snelle verandering van een procesvariabele wordt tegengegaan. Opgemerkt moet worden dat de D-controller alleen niet kan worden gebruikt voor besturingstoepassingen. 
De afgeleide actie verhoogt de snelheid van het antwoord omdat het een kickstart geeft voor de uitvoer, en anticipeert dus op het toekomstige gedrag van de fout. De snellere D-controller reageert op de veranderingen in de procesvariabele, als de afgeleide term groot is (wat wordt bereikt door de afgeleide constante of tijd Td te verhogen).
In de meeste PID-controllers hangt de respons van de D-regeling alleen af van de procesvariabele, in plaats van van de fout. Dit voorkomt pieken in de output (of een plotselinge toename van de output) in het geval van een plotselinge wijziging van het setpoint door de operator. En ook de meeste regelsystemen gebruiken minder afgeleide tijd td, omdat de afgeleide respons erg gevoelig is voor de ruis in de procesvariabele, wat leidt tot een extreem hoge output, zelfs voor een kleine hoeveelheid ruis. 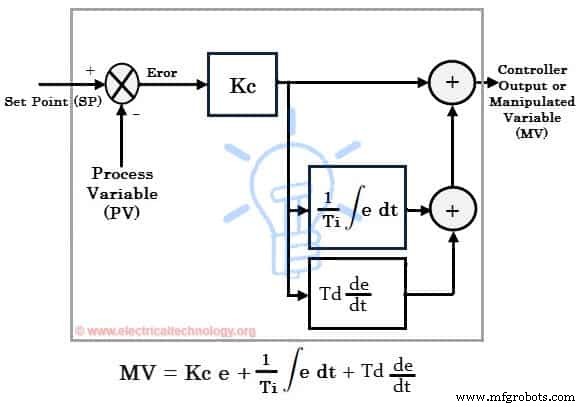
Daarom wordt door het combineren van proportionele, integrale en afgeleide regelreacties een PID-regelaar gevormd. Een PID-controller vindt universele toepassing; men moet echter de PID-instellingen kennen en deze goed afstemmen om de gewenste uitvoer te produceren. Tuning betekent het proces van het verkrijgen van een ideale respons van de PID-regelaar door optimale versterkingen van proportionele, integrale en afgeleide parameters in te stellen. 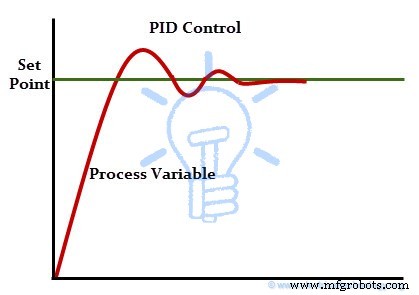
Er zijn verschillende methoden om de PID-regelaar af te stemmen om de gewenste respons te krijgen. Sommige van deze methoden omvatten vallen en opstaan, procesreactiecurvetechniek en Zeigler-Nichols-methode. De meest populaire Zeigler-Nichols- en trial-and-error-methoden worden gebruikt.
Dit gaat over de PID-controller en zijn werking. Vanwege de eenvoud van de controllerstructuur zijn PID-controllers toepasbaar voor een verscheidenheid aan processen. En het kan ook worden afgestemd op elk proces, zelfs zonder een gedetailleerd wiskundig procesmodel te kennen. Enkele van de toepassingen zijn onder meer op PID-controller gebaseerde motortoerentalregeling, temperatuurregeling, drukregeling, stroomregeling, vloeistofniveau, enz.
Realtime PID-regelaars
Er zijn verschillende typen PID-controllers beschikbaar in de huidige markt, die kunnen worden gebruikt voor alle industriële regelbehoeften zoals niveau, debiet, temperatuur en druk. Bij het beslissen over het regelen van dergelijke parameters voor een proces met behulp van PID, zijn opties inclusief het gebruik van een PLC of een stand-alone PID-controller.
Standalone PID-controllers worden gebruikt waar een of twee lussen moeten worden bewaakt en gecontroleerd of in situaties waar het moeilijk toegankelijk is met grotere systemen. Deze speciale bedieningsapparaten bieden een verscheidenheid aan opties voor enkele en dubbele lusbesturing. Standalone PID-controllers bieden configuraties met meerdere instelpunten en genereren ook de onafhankelijke meervoudige alarmen. 
Sommige van deze zelfstandige regelaars zijn Yokogava-temperatuurregelaars, Honeywell PID-regelaars, OMEGA autotune PID-regelaars, ABB PID-regelaars en Siemens PID-regelaars.
De meeste besturingstoepassingen, PLC's, worden gebruikt als PID-controllers. PID-blokken zijn ingebouwd in PLC's/PAC's en bieden geavanceerde opties voor een nauwkeurige besturing. PLC's zijn intelligenter en krachtiger dan standalone controllers en maken het werk gemakkelijker. Elke PLC bestaat uit het PID-blok in hun programmeersoftware, of het nu Siemens, ABB, AB, Delta, Emersion of Yokogava PLC is.
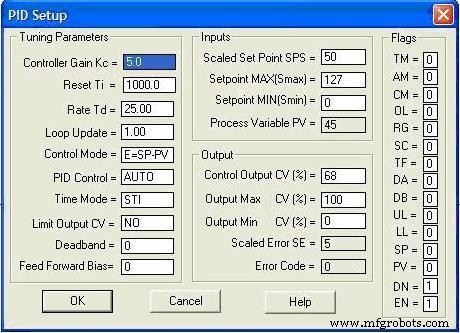
De onderstaande afbeelding toont het Allen Bradley (AB) PID-blok en het setup-venster. 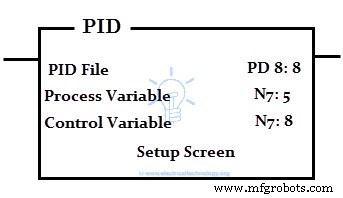
De onderstaande afbeelding toont het Siemens PID-blok . 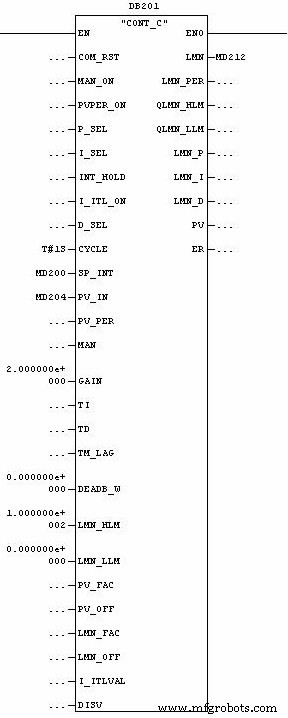
De onderstaande afbeelding toont PID-controller VI's aangeboden door LabVIEW PID-toolset. 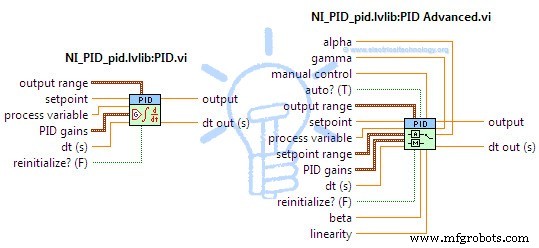
Industriële technologie
- Wat is de werking van een afstandssensor en zijn toepassingen
- Wat is AD8232 ECG-sensor:werken en zijn toepassingen
- Wat is 3D-printen? Werkingsprincipe | Soorten | Toepassingen
- Wat is laserstraalbewerking? - Typen en werking
- Wat is Rapid Prototyping? - Typen en werken?
- Wat is additieve productie? - Soorten en werking?
- Wat is aansnijden? - Proces, werken en typen
- Wat is laserlassen? - Werken, typen en toepassingen?
- Wat is weerstandslassen? - Typen en werken?
- Wat is Jig Boring Machine? - Types en werking
- Wat is extrusie? - Werken, typen en toepassingen