


Maak een draadloos robotvoertuig met IR-sensoren
Een robot is een mechanische of virtuele kunstmatige agent, meestal een elektromechanische machine die wordt geleid door een computerprogramma met behulp van elektronische schakelingen. Robots kunnen autonoom of semi-autonoom zijn en variëren van mensachtigen zoals Honda's is de geavanceerde Step in Innovative Mobility en TOSY's. TOSY Ping Pong-speelrobot tot industriële robots, robots met patentondersteuning, medische bedieningsrobots, hondentherapierobots, collectief geprogrammeerde zwermrobots en zelfs microscopisch kleine nanorobots. Door een leven als een verschijning weer te geven of bewegingen te automatiseren, kan een robot een gevoel van intelligentie of op zichzelf overdragen. Dit artikel bespreekt draadloze robotvoertuigen op basis van IR-sensoren.
Wat is een draadloos robotvoertuig?
De robot is een technologie die zich bezighoudt met het ontwerp, de constructie, de bediening en de toepassing van robots, evenals computersystemen, en wordt gebruikt voor besturing, sensorische feedback en informatieverwerking worden robots genoemd. Deze technologie houdt zich bezig met geautomatiseerde machines die door mensen in gevaarlijke omgevingen kunnen worden geplaatst, of qua uiterlijk en gedrag op mensen lijken. Tegenwoordig worden robots geïnspireerd door de natuur en dragen ze bij op het gebied van bio-geïnspireerde robotica. Deze robots creëerden ook een nieuwe tak van robotica en zachte robotica. De mechanische technieken ontwikkeld door het industriële tijdperk, er zijn meer praktische toepassingen zoals geautomatiseerde machines, afstandsbediening en draadloze afstandsbediening.

Wat is een IR-sensor?
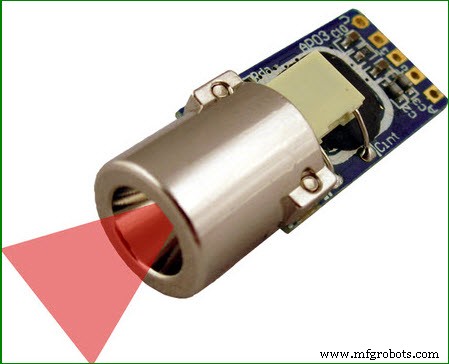
Een IR-sensor is een apparaat dat zendt om bepaalde aspecten van de omgeving waar te nemen en IR-straling detecteert die erop valt. De zender is gewoon een IR-LED (Light Emitting Diode) en de detector is gewoon een IR-fotodiode die gevoelig is voor IR-licht van dezelfde golflengte dat wordt uitgezonden door de IR-LED. Wanneer IR-licht op de fotodiode valt, veranderen de weerstanden en uitgangsspanningen in verhouding tot de grootte van het ontvangen IR-licht. Er zijn veel soorten IR-sensoren die zijn gebouwd en kunnen worden gebouwd, afhankelijk van de toepassing. Contrastsensoren (gebruikt in lijnvolgende robots), nabijheidssensoren (gebruikt in telefoons met touchscreen) en obstructiesensoren (gebruikt voor het tellen van goederen en in inbraakalarmen) zijn enkele voorbeelden.
Radio Frequentie op afstand bestuurbare draadloze robot
Het RF-bestuurde draadloze robotvoertuig omvat voornamelijk een RF-zender en RF-ontvanger.
RF-zender
RF-modules zijn meestal klein van formaat en werken in het spanningsbereik van 3V tot 12V. RF-zendermodules zijn ontworpen om alleen met een frequentie van 433 MHz te werken. Als logisch nul wordt verzonden, wordt er geen stroom door de zender getrokken. Voor zenden is logica één, het verbruikt ongeveer 4,5 mA met 3V. De zender en ontvanger zijn gekoppeld aan de 8051-microcontrollers en krijgen de gewenste werking. RF-zender heeft spanning geleverd in het bereik van 3V tot 6V en uitgangsvermogen in het bereik van 4V tot 12V.
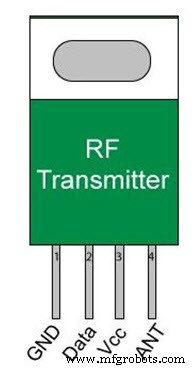
Het onderstaande schema van de RF-zender wordt gebruikt om verschillende drukknoppen aan te sluiten om het robotvoertuig in verschillende richtingen te bewegen, zoals vooruit, achteruit, rechts en links. Dus door op de juiste drukknop te drukken, kunnen we de beweging van het robotvoertuig besturen.
RF-ontvanger
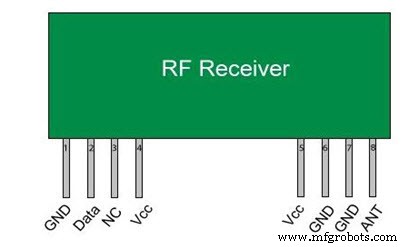
RF-ontvanger is ook klein van formaat en RF-ontvanger heeft een voedingsstroom van 3,5 mA met een bedrijfsspanning van 5V. RF-zendermodules zijn ontworpen om alleen met 433 MHz te werken (die moet overeenkomen met de zenderfrequentie voor communicatiedoeleinden om signalen van de zender te ontvangen).
RF-communicatie met behulp van het robotvoertuig
Radiofrequentie (RF) bestaat uit een zender en een ontvanger, die zijn aangesloten op een geïsoleerd circuit dat moet worden bestuurd. Een stuursignaal wordt overgedragen van het zendereinde in de vorm van radiogolven of elektromagnetische golven, zodat het apparaat op afstand kan worden bestuurd, dat is verbonden met het ontvangereinde. Dit stuursignaal wordt verzonden door gebruik te maken van elektromagnetische golven of radiogolven van radiofrequentie. Dus het stuursignaal dat aan de ontvangerzijde wordt ontvangen en de nauwkeurige uitvoer krijgt, zoals een robotvoertuig, een robot voor speciale doeleinden, een apparaat voor communicatiedoeleinden, enzovoort.
RF-gestuurd robotvoertuig
Het belangrijkste doel van dit project is het ontwerpen van een robotvoertuig dat wordt bestuurd door een afstandsbediening van een tv. Hier gebruikt het voorgestelde systeem RF-technologie voor bediening op afstand. Een IR-sensor is gekoppeld aan de besturingseenheid van de robot voor het detecteren van de infraroodsignalen die door de afstandsbediening worden verzonden. Een 8051-serie van de microcontroller wordt gebruikt voor de gewenste werking.
In het zendgedeelte (TX) worden drukknoppen gebruikt om de commando's naar de ontvanger te sturen om de beweging van de robot te besturen, ofwel om in vier richtingen te bewegen, zoals vooruit, rechts, achteruit en links, enz. In het ontvangende gedeelte waren twee motoren gekoppeld aan de 8051-familiemicrocontroller, waar ze worden gebruikt voor de beweging van het voertuig.

De afstandsbediening van de tv genereert op RC5 gebaseerde gegevens die worden ontvangen door een infraroodontvanger die is gekoppeld aan de microcontroller. Het ingebouwde programma in de microcontroller verwijst naar de code om de gewenste output te produceren op basis van de i/p-gegevens om de motoren te laten werken via een motorstuurprogramma-IC.
De RF-zender werkt als een RF-afstandsbediening die het voordeel heeft van een ruim bereik (tot 200 meter) met een geschikte antenne, terwijl de ontvanger decodeert voordat deze aan een andere microcontroller wordt doorgegeven om gelijkstroommotoren via motorbesturings-IC aan te drijven voor het vereiste werk.
Verder kan dit project worden verbeterd met behulp van DTMF-technologie. Met behulp van RF-technologie kunnen we de robot besturen met behulp van een mobiele telefoon. Deze technologie heeft een voordeel ten opzichte van een groot communicatiebereik in vergelijking met RF-technologie.
Dit gaat dus allemaal over op IR-sensoren gebaseerde draadloze robotvoertuigen. We hopen dat u dit concept beter begrijpt. Verder, eventuele twijfels over dit concept of elektrische en elektronische projecten, geef uw feedback in de commentaarsectie hieronder. Hier is een vraag voor u, wat is de belangrijkste functie van de IR-sensor?
Sensor
- Dag twee op IoT World:DDS gebruiken om slimme zonwering nog slimmer te maken
- IoT-apparaat integreert CPU, draadloos, sensoren, AI-engine
- Interactieve laserprojector met Zigbee-sensoren
- Analoge sensoren op de Raspberry Pi met een MCP3008
- Weten wanneer je sensoren moet gebruiken voor robotlassen
- Leerlingen bouwen gerobotiseerd afvalsorteersysteem met B&R-technologie
- Sensoren testen in mist om toekomstig transport veiliger te maken
- Mensenhanden imiteren om betere sensoren te maken
- Ultradunne en zeer gevoelige reksensoren
- Ultradunne, batterijvrije spanningssensoren voor industriële robotarmen
- Hoe de elektronica van morgen te maken met inkjet-geprint grafeen