


ROS2 + DDS:speel het opnieuw
Om de opgenomen data terug af te spelen in ROS2:
rtireplay -cfgFile ros2_replay.xml -cfgName simple_example
Resultaten
Nu heb ik ROS2 LiDAR-gegevens verzameld, gegenereerd tijdens een reeks auto-simulatorsessies, en deze kunnen allemaal on-demand worden afgespeeld, zoals verwacht:
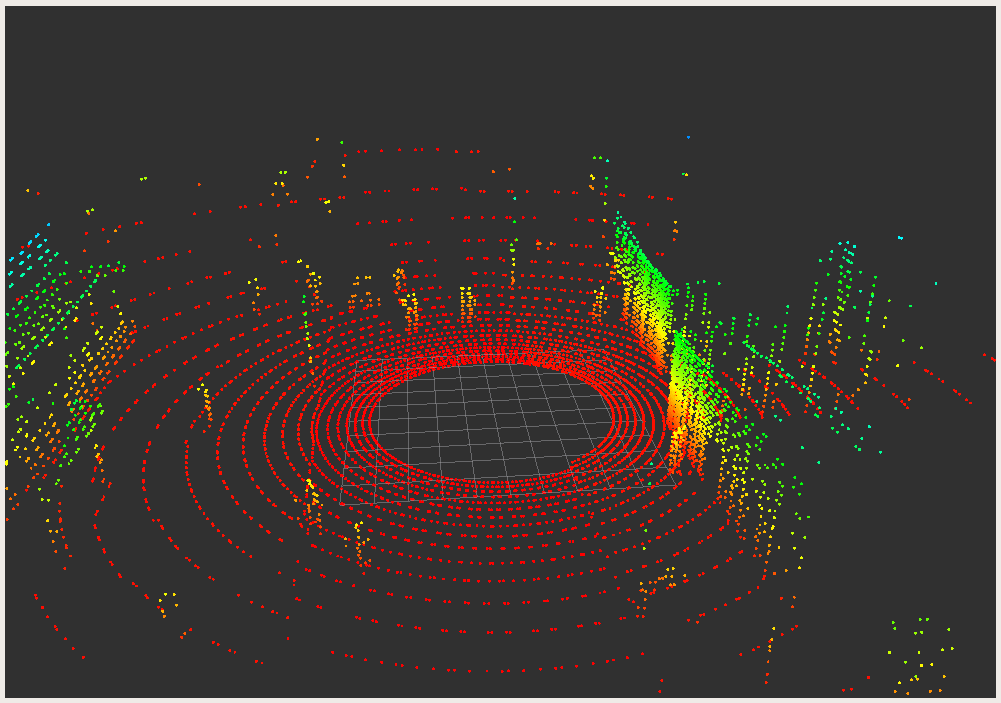
Leuk! Ik kan nu LiDAR-gegevens on-demand opnieuw afspelen zonder dat ik een speciale autosimulator (of een echt voertuig) nodig heb.
Het was leuk om te spelen met de
Bekijk de vorige RTI-blogberichten voor meer informatie over ROS2 en DDS:
Een veldgids voor interoperabiliteit en wanneer ecosystemen samensmelten
Internet of Things-technologie
- Open DDS versus RTI DDS-software
- MQTT en DDS:communicatie van machine tot machine in IoT
- Connext DDS en het industriële IoT:de 5 belangrijkste dingen om te weten
- ROS2 + DDS:een veldgids voor interoperabiliteit
- De vierde industriële revolutie
- Datacompatibel blijven in het IoT
- Wat moet ik doen met de gegevens?!
- Het IoT democratiseren
- 5 trends in connectiviteit
- Top 10 IIoT-platforms
- De toekomst van datacenters