


Automatische adressering voor autotoegang vergelijken
Autotoegangssystemen die Bluetooth Low Energy gebruiken, hebben doorgaans een centrale module en meerdere satellietmodules/-knooppunten, die communiceren via een CAN-bus (Controller Area Network) of LIN-bussen (Local Interconnect Network). De satellietmodules zijn fysiek over de auto verdeeld om het Bluetooth-communicatiebereik te verbeteren.
Systeemontwerpers willen de produceerbaarheid van satellietmodules verbeteren door één PCB te ontwerpen met identieke software, zodat de installatie in de auto onafhankelijk is van de positie van het Bluetooth-knooppunt. Omdat de hardware en software van elk satellietknooppunt op het moment van installatie identiek zijn, is een schema nodig om de centrale module in staat te stellen een uniek CAN- of LIN-adres toe te wijzen aan elk satellietknooppunt nadat de modules in het voertuig zijn geïnstalleerd.
Een optie is om een speciaal LIN-daisy-chain-netwerk te gebruiken om CAN-ID's tijdens de productie met de modules te delen. In dit scenario gebruikt de centrale module de LIN-interface om elke satellietmodule te adresseren, maar de LIN-interface zal gedurende de levensduur van het voertuig niet opnieuw worden gebruikt. Een andere optie vervangt de speciale LIN-bus door een discrete implementatie die de stuklijstkosten (BOM) verlaagt. Om de systeemkosten verder te verlagen, wordt een echte draadloze optie die alleen Bluetooth gebruikt, en geen extra hardware, de Bluetooth-infrastructuur die al beschikbaar is op de knooppunten hergebruikt om de modules te adresseren.
Uiteindelijk vermindert de draadloze methode de stuklijst, de systeembedrading en de kosten voor het opslaan, beheren en monteren van de nu onnodige componenten. Dit artikel geeft een overzicht van bekabelde auto-adresseringsmethoden voordat we dieper ingaan op de draadloze methode.
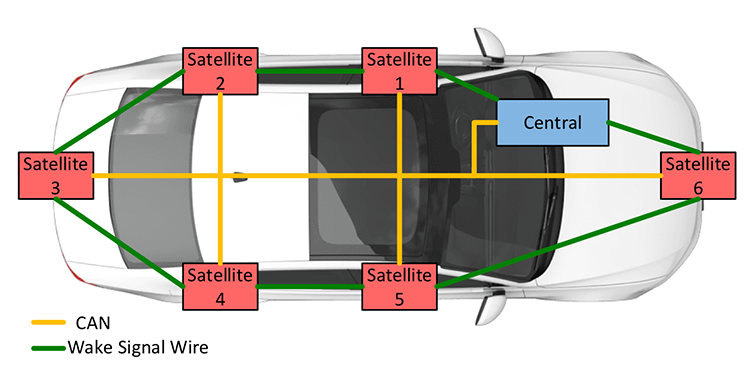
Autotoegangssystemen voor auto's zijn in de richting van het gebruik van Bluetooth Low Energy voor telefoon-als-een-sleutel of andere digitale-sleutelmogelijkheden. Deze systemen werken op dezelfde manier als passieve startsystemen met passieve start, maar voegen de mogelijkheid toe om de smartphone van de bestuurder als sleutel te gebruiken en vervangen zo de traditionele sleutelhangers. Phone-as-a-key-compatibele voertuigen implementeren een centrale module of smart key-module en meerdere satellietmodules, die elk een Bluetooth-signaal kunnen ontvangen van een smartphone of sleutelhanger. Een typisch systeem kan zes tot twaalf satellietmodules hebben, naast de centrale module (Figuur 1).
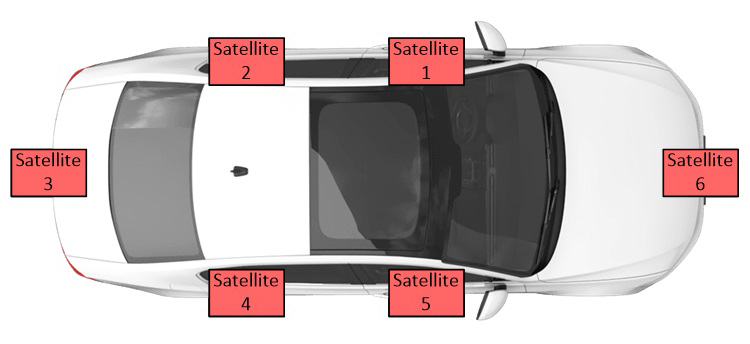
Figuur 1. Dit diagram laat zien waar Bluetooth-satellietmodules in de auto kunnen worden verdeeld.
Consumenten hebben het phone-as-a-key-systeem nodig om te kunnen bepalen wanneer de telefoon of sleutelhanger zich binnen de ontgrendelingszone van het voertuig bevindt. Om de locatie van de smartphone of afstandsbediening te benaderen, trianguleert het systeem de signalen die worden ontvangen door verschillende satellietmodules, die door de auto worden verdeeld op plaatsen zoals de passagierszijde, het tuimelpaneel, de kofferbak of bumpers.
De centrale module van het voertuig communiceert met de satellietmodules via een communicatie-interface zoals een CAN-bus of LIN-bus. De centrale module gebruikt de gegevens die van elke satellietmodule worden ontvangen om de locatie van de smartphone of sleutelhanger te trianguleren en bepaalt vervolgens of toegang tot de auto moet worden verleend. Afbeelding 2 illustreert hoe een CAN-bus kan worden gebruikt als het belangrijkste communicatienetwerk tussen de centrale en satellietmodules.
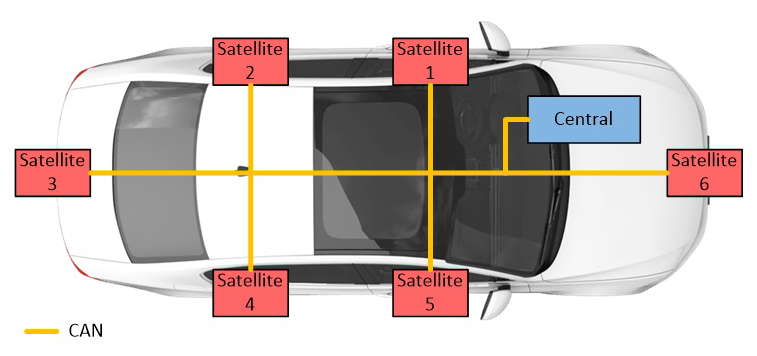
Figuur 2. Een CAN-bus kan worden aangenomen als het belangrijkste communicatienetwerk tussen de centrale en satellietmodules in een Bluetooth-autotoegangssysteemnetwerk.
Het CAN-busadres van de satellietmodules stelt de centrale module in staat te bepalen van welke satellietmodule hij gegevens ontvangt. De centrale module koppelt de unieke CAN-ID of het unieke adres aan de locatie van elke specifieke satellietmodule, bepaald door het algehele systeemontwerp. In plaats van een unieke PCB te hebben voor elke satellietmodule, met het busadres vast of hard gecodeerd, zou het voordelig zijn om een enkel PCB-ontwerp te hebben met een enkele firmwareversie voor alle satellietmodules. Dit vermijdt de extra kosten en logistieke problemen die gepaard gaan met productie en voorraadbeheer van zes, acht of meer bijna identieke eenheden. Een enkel ontwerp vereenvoudigt ook de productie door de installatie van dezelfde satellietmodule overal in het voertuig mogelijk te maken.
Aangezien de hardware en software van de satellietknooppunten allemaal identiek en ongeadresseerd zijn op het moment van installatie, is een schema vereist waarmee de centrale module een uniek CAN-ID of adres kan toewijzen aan elke satellietmodule na installatie in de auto.
Automatische adressering via kabel:LIN-doorlusmethode
Momenteel wordt het toewijzen van CAN-busadressen aan satellietmodules in auto's bereikt met behulp van een afzonderlijk communicatienetwerk (zoals LIN) waarbij de satellieten in serie op de bus zijn geschakeld (Figuur 3). De centrale module stuurt via de LIN-bus een CAN-bus-netwerkadres naar het eerste satellietknooppunt. Eenmaal voltooid, stuurt het eerste satellietknooppunt het volgende adres dat van de centrale module is ontvangen naar de tweede satelliet met behulp van de LIN-bus. Dit proces gaat door totdat alle satellieten hun unieke CAN-adressen hebben ontvangen.
Afbeelding 3. Deze architectuur voor automatisch adresseren gebruikt een LIN-daisy-chain voor het verzenden van de unieke CAN-ID's naar de satellieten.
Dit schema vereist twee fysieke LIN-lagen (PHY's) per module, één voor het ontvangen van gegevens en een andere voor het verzenden van gegevens. De LIN PHY's worden alleen gebruikt tijdens de auto-adressering. Zodra de satellieten zijn geprogrammeerd, vindt alle standaard datacommunicatie plaats via de CAN-bus voor toegang tot de auto. Een typische auto kan zes tot twaalf satellietmodules hebben, wat betekent dat er tussen de 14 en 26 LIN PHY's nodig zijn om de eenmalige automatische adressering te ondersteunen, wat aanzienlijk bijdraagt aan de PCB-stuklijst, de systeemkosten en de complexiteit van het voertuig.
Automatische adressering via kabel:methode met één draad
Texas Instruments heeft een alternatieve methode ontwikkeld om de stuklijstkosten van elke module te verlagen door de speciale auto-adresserende LIN PHY's te vervangen door een MOSFET en een paar weerstanden. Het belangrijkste verschil in de auto-adresseringssoftware van dit schema is dat alle satellietmodules zijn geprogrammeerd voor het Bluetooth-systeem van de chip (SoC) om de CAN-bus te negeren totdat een wake-signaal wordt ontvangen op de P_IN-lijn. Afbeelding 4 toont het blokschema.
klik voor grotere afbeelding
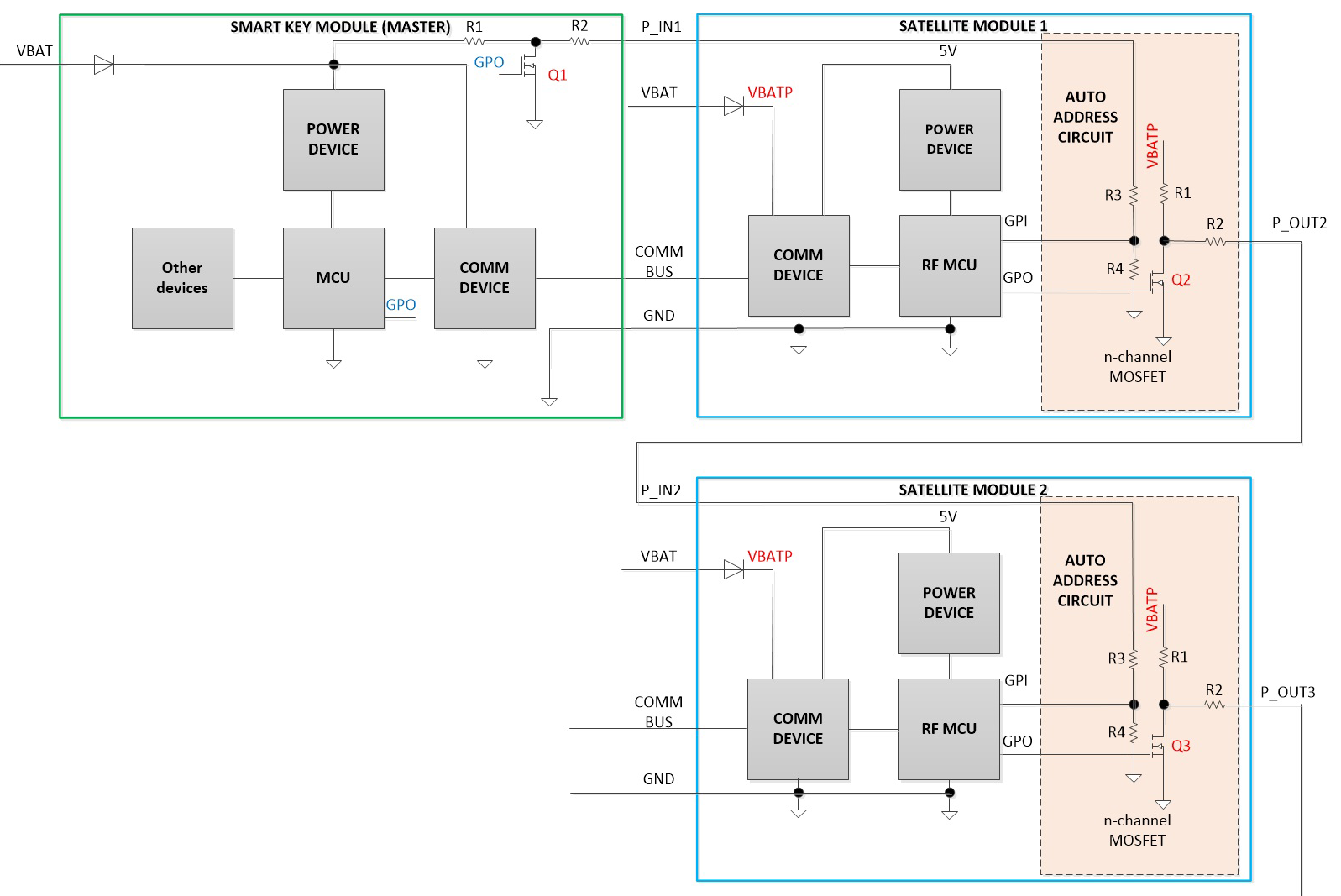 Figuur 4. De auto-adresseringsmethode met één draad vervangt de LIN PHY's door een MOSFET en een paar weerstanden.
Figuur 4. De auto-adresseringsmethode met één draad vervangt de LIN PHY's door een MOSFET en een paar weerstanden.
De centrale module start het auto-adresseringsproces door een pulsbreedtemodulatie (PWM)-signaal op de P_IN1-lijn te verzenden met behulp van veldeffecttransistor Q1. Via een spanningsdeler ontvangt de eerste satellietmodule het weksignaal op batterijniveau, P_IN1, waarmee de Bluetooth MCU wordt gesignaleerd om naar de CAN-bus te "luisteren". Tegelijkertijd begint de centrale module constant de eerste CAN-ID van de satellietmodule op de CAN-bus te verzenden. Zodra de eerste satellietmodule het CAN ID-bericht ontvangt, stuurt deze een bevestigingsbericht terug naar de centrale module om de juiste ontvangst van het adres te bevestigen. Nadat het bevestigingsbericht is verzonden, stuurt de eerste satellietmodule het PWM-ontwaaksignaal naar de tweede satellietmodule, waarmee deze module aangeeft naar de CAN-bus te gaan luisteren en zijn nieuwe CAN-ID te ontvangen. Nadat de centrale module het bevestigingsbericht van de eerste satellietmodule heeft ontvangen, zal de CAN-bus constant het CAN ID-bericht van de tweede satellietmodule verzenden totdat het een bevestigingsbericht van de tweede satellietmodule ontvangt.
Samengevat, elke satellietmodule, één voor één, wekt de volgende om de CAN-ID van de CAN-bus te ontvangen. De centrale module verhoogt de volgende CAN-ID die wordt verzonden na ontvangst van een bevestigingsbericht van de geadresseerde satellietmodule totdat alle modules zijn geadresseerd*.
Hoewel het een verbetering is, vereist deze implementatie nog steeds bedrading tussen de centrale module en elk van de satellietmodules, zoals weergegeven in figuur 5.
Figuur 5. De architectuur voor auto-adressering met één draad vereist nog steeds bedrading tussen de centrale en satellietmodules.
Draadloze automatische adressering/kabelvervanging
Texas Instruments heeft ook een methode voor automatische adressering ontwikkeld die gebruikmaakt van Bluetooth-lokalisatietechnieken. Met deze technieken kunnen de Bluetooth-satellietmodules een CAN-adres krijgen vanaf de centrale module tijdens de fabricage en nadat een module is vervangen. Het moduleadresseringsproces begint met de module waarvan is vastgesteld dat deze zich het dichtst bij de centrale module bevindt en gaat verder in de volgorde van de dichtst bij de verste afstand totdat de verste module is geadresseerd. De daadwerkelijke locatie is niet nodig, aangezien de plaatsing van de modules, de meettechniek en de omgeving van de module de gemeten afstand bepalen. Afstand dn vertegenwoordigt de gemeten afstand (van de Bluetooth-signaalsterkte-indicatie [RSSI]), idealiter:
d1
Afbeelding 6 toont bijvoorbeeld het blokschema en de afstand tussen elke module en de centrale module.
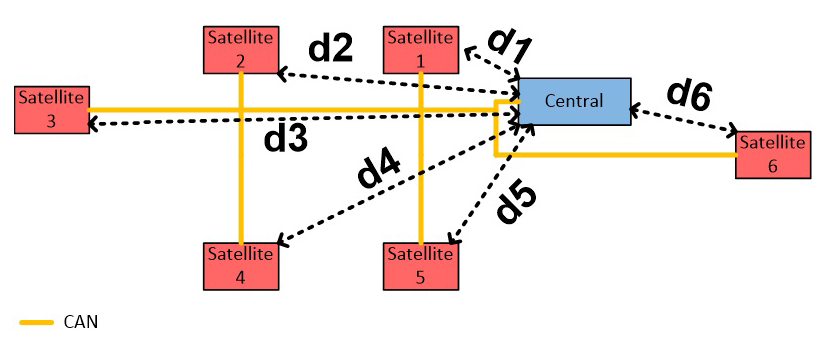
Figuur 6. Dit diagram toont de afstanden tussen elke module in de draadloze auto-adresseringsmethode vanaf de centrale module.
In de praktijk kan de werkelijke afstand afwijken van de gemeten afstand vanwege de radiofrequentie (RF) voortplantingskarakteristieken van de ruimte tussen de specifieke satelliet en de centrale module. Maar zolang de gemeten afstand van elke satellietmodule herhaaldelijk consistent is en er geen overlap is tussen gemeten afstanden van meerdere modules, kan de centrale module ze correct adresseren zonder hun exacte locatie rond het voertuig te kennen, omdat de gemeten afstanden altijd zullen zijn in dezelfde volgorde van kort naar vers. Daarom weet de centrale module uit eerdere tests dat de eerste module altijd het portier aan de bestuurderszijde is (CAN-adres 1), de tweede module altijd de voorbumper (CAN-adres 2), enzovoort.
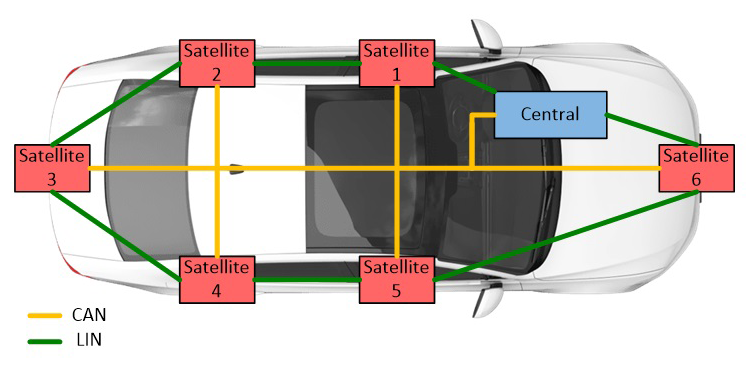
Om ervoor te zorgen dat het automatische adresseringsschema betrouwbaar werkt, moeten zorgvuldige tests worden uitgevoerd om de kenmerken van elk voertuigmodel te begrijpen, waardoor het mogelijk wordt om mogelijke problemen te identificeren en op te lossen. Als de afstandsmetingen van de centrale module tussen twee of meer ongeadresseerde satellietmodules bijvoorbeeld gelijk of gelijk zijn, kan een eerder geadresseerde satellietmodule worden gebruikt om die ongeadresseerde modules te lokaliseren die niet door de centrale konden worden onderscheiden, zoals weergegeven in figuur 7. Dit kan ook worden gedaan met behulp van meerdere satellietmodules.
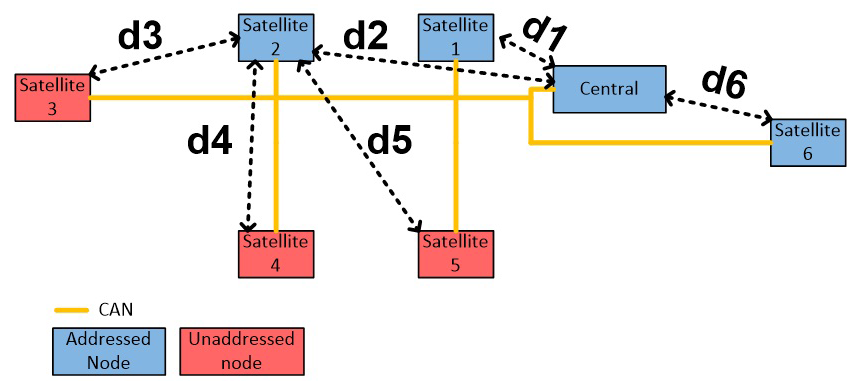
Figuur 7. Een eerder geadresseerde satellietmodule kan worden gebruikt om ongeadresseerde modules te lokaliseren die niet door de master konden worden onderscheiden.
Wanneer de centrale module de satellieten 1, 2 en 6 kan lokaliseren, maar niet 3, 4 en 5, wordt satellietmodule 2 gebruikt om de afstanden voor satellietmodules 3, 4 en 5 te meten. Nogmaals, zolang als de afstandsmetingen zijn consistent en er is geen overlap in afstandsmetingen tussen modules, de satellietmodules kunnen goed worden geadresseerd en zullen altijd in dezelfde volgorde worden geadresseerd.
Implementatie
Om consistent te zijn met de generieke toegangsprofiellaag (GAP) van het Bluetooth Low Energy-protocol, zullen we naar de centrale module verwijzen als een "scanner" en naar de satellietmodules als "adverteerders". De GAP-laag verwerkt de toegangsmodi en procedures van het apparaat, inclusief apparaatdetectie, koppeling tot stand brengen, koppeling beëindigen, initiatie van beveiligingsfuncties en apparaatconfiguratie. De twee toestanden van het apparaat die relevant zijn voor automatische adressering zijn:
- Adverteerder:het apparaat adverteert met specifieke gegevens om alle startende apparaten te laten weten dat het een apparaat is dat kan worden aangesloten (Opmerking:deze advertentie bevat het apparaatadres en kan enkele aanvullende gegevens bevatten, zoals de apparaatnaam).
- Scanner:bij ontvangst van de advertentie stuurt het scanapparaat een scanverzoek naar de adverteerder.
De adverteerder reageert met een scanreactie; dit proces wordt apparaatdetectie genoemd. De scaninrichting is op de hoogte van de advertentie-inrichting en kan hiermee een verbinding tot stand brengen. Afbeelding 8 toont de stroom van adverteerders en scanners hieronder.
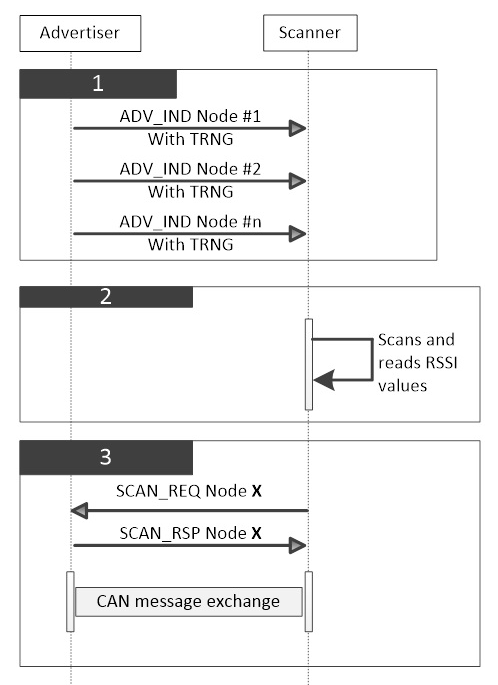
Figuur 8. Dit Bluetooth Low Energy-softwarediagram toont de stroom van adverteerders en scanners.
Als we naar figuur 8 kijken, zullen alle adverteerders adverteren met specifieke gegevens, ze zullen een echt willekeurig getal genereren dat als onderdeel van hun advertentiegegevens kan worden gebruikt. Dit garandeert geen duplicatie van nodes.
De scanner scant meerdere keren en leest de RSSI-waarden van elk van de adverteerders; het zal dan het gemiddelde nemen van de RSSI-waarden om de adverteerder te bepalen die er het dichtst bij staat.
De scanner stuurt een SCAN-verzoek naar de dichtstbijzijnde adverteerder; het zal dan het auto-adres CAN-bericht verzenden en wachten op de bevestiging van het CAN-bericht van de adverteerder.
De adverteerder gebruikt SCAN_REQ om het automatische CAN-adres in te schakelen. Wanneer de adverteerder het CAN-bericht met automatisch adres ontvangt, stuurt hij het CAN-bevestigingsbericht en stopt met adverteren.
Deze stappen worden herhaald totdat alle adverteerders automatisch zijn geadresseerd.
Resultaten
Het testen is gedaan met behulp van het referentieontwerp van de Bluetooth Low Energy + CAN-satellietmodule voor toegang tot de auto, samen met een harnas van 12 ft. De afstand tussen elke connector was ongeveer 6 ft (Figuur 9).
klik voor grotere afbeelding
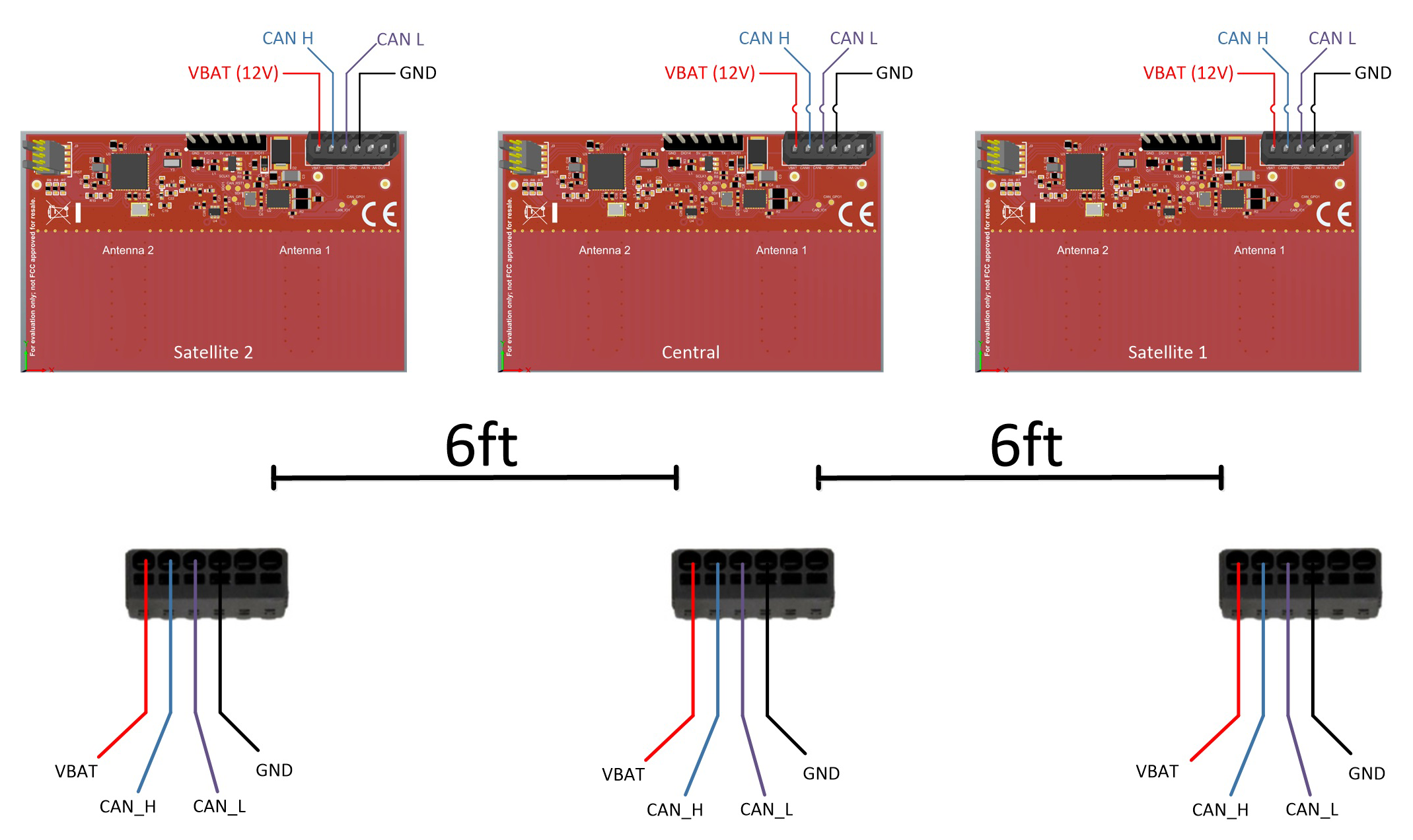
Afbeelding 9. De hardwareconfiguratie voor het testen omvat het TIDA-020032-referentieontwerp.
En de planken werden geplaatst zoals weergegeven in afbeelding 10 (waarbij d1 ~4 ft en d2 ~8 ft):
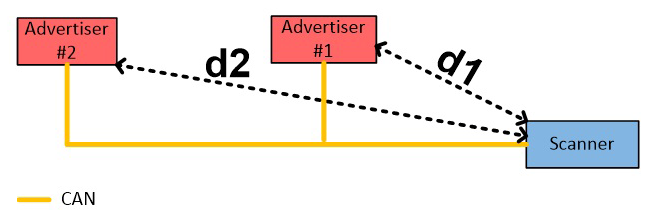
Afbeelding 10. Dit diagram toont de hardwareplaatsing voor het testen.
De Bluetooth Low Energy-parameters voor de scanner waren een scanduur van 1 s en een scanvenster en -interval van 250 ms. De Bluetooth Low Energy-parameters van de adverteerders voor de adverteerders werden geadverteerd gedurende een interval van 100 ms. Tijdens elke meetperiode nam de scanner 10 RSSI-samples per knooppunt en nam het gemiddelde van elke reeks metingen om de gemeten afstandswaarde van elke adverteerder te produceren.
Drie automatische adresseringsschema's vergelijken
De resultaten van de vorige test zijn samengevat in Tabel 1, waarin de relatieve vertraging, betrouwbaarheid en implementatiekosten van elk van de drie auto-adresseringstechnieken die in dit artikel worden besproken, worden vergeleken.
Tabel 1. Vergelijking van automatische adresseringstechnieken
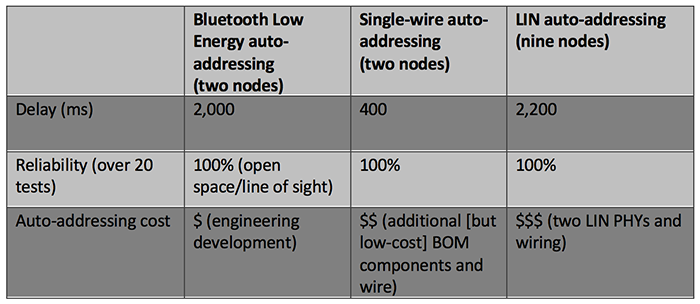
Tabel 1 vergelijkt de resultaten van onze draadloze Bluetooth Low Energy-adresseringstest met de twee bekabelde auto-adresseringstechnieken die eerder zijn besproken. Uit deze resultaten blijkt dat de draadloze techniek ongeveer 5 keer langer duurt dan de bedrade techniek. Een betere, snellere respons kan worden bereikt door verdere verfijning van de parameters van het Bluetooth Low Energy-netwerk; er is ruimte voor verbetering. Dit vereist verdere tests omdat de werkelijke afstand kan afwijken van de gemeten afstand vanwege de RF-voortplantingskenmerken die zijn gekoppeld aan de specifieke locatie van elk knooppunt in het voertuig (d.w.z. niet-line-of-sight-uitdagingen).
Draadloze auto-adressering is de meest kostengeoptimaliseerde oplossing vanuit materiaalperspectief, waarvoor geen extra hardware en geen extra bedrading tussen modules nodig is. Om van deze voordelen te kunnen genieten, moeten systeemontwerpers echter tests uitvoeren om de RF-prestaties te leveren om de software te optimaliseren en onnauwkeurigheden te voorkomen. Als u de voorkeur geeft aan een bekabelde benadering, vereist de bekabelde auto-adresseringsmethode van TI de toevoeging van een paar kleine en goedkope componenten aan de stuklijst, samen met draden die tussen elke module zijn aangesloten. Samen bieden ze een reeks opties bij het kiezen van een methode om automatische adresseringsmogelijkheden voor Bluetooth-autotoegangssystemen te implementeren.
* Voor meer details en testresultaten over de enkeldraads auto-adresseringsmethode, raadpleeg de Texas Instruments autotoegang Bluetooth Low Energy + CAN-satellietmodule referentieontwerpgids.
Referenties
- Bluetooth-kernspecificaties
- De standaard voor verbinding stelt nieuwe normen op het gebied van veiligheid, Bluetooth SIG
>> Dit artikel is oorspronkelijk gepubliceerd op onze zustersite, EDN.
Ingebed
- C# Constructor
- C# geneste klasse
- C# Constructor Overbelasting
- Ontwerpen met Bluetooth Mesh:chip of module?
- Cervoz:DDR4 zeer laag profiel SO-DIMM
- Ultra-wide band-chip maakt smartphone-gebaseerde voertuigtoegang mogelijk
- Kleine Bluetooth 5.0-module integreert chipantenne
- Kleine AI-module bouwt voort op Google Edge TPU
- Front-end module vereenvoudigt wifi 6-ontwerp
- ams:module versnelt ontwikkeling van ultrasone watermeters
- Kleine module integreert meerdere biosensoren