


Robot-naverwerkers:alles wat u moet weten
Weet u niet welke postprocessor u moet kiezen? Hier zijn 5 stappen om de perfecte robot-postprocessor te kiezen.
Post-processors vormen de brug tussen de offline programmeersoftware en uw robot.
Als je de juiste post-processor kiest, zal je programma out-of-the-box werken - de echte robot zal precies bewegen zoals in de simulatie. Als u echter de verkeerde postprocessor kiest, staat u voor een moeilijke tijd:de robot kan onregelmatig bewegen, hij kan in de verkeerde richting bewegen of hij beweegt helemaal niet.
RoboDK biedt veel verschillende post-processors om uit te kiezen. Het is de moeite waard om vertrouwd te raken met hoe post-processors werken, hoe u de juiste kiest en hoe u uw eigen post-processor kunt aanpassen of maken als de beschikbare post-processors niet helemaal geschikt voor u zijn.
Dit artikel vertelt je alles wat je moet weten over robot-postprocessors in RoboDK.
Wat is een postprocessor?
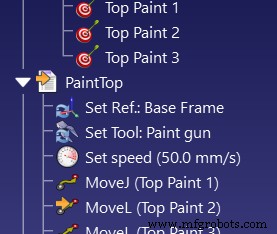
De meeste robotprogramma's bevatten dezelfde basiscommando's, die steeds opnieuw worden gebruikt. De drie meest voorkomende zijn:
- Verplaats gewricht — Dit verplaatst de robot naar een punt in de ruimte door de robotgewrichten zo snel mogelijk naar de gewenste positie te sturen, wat handig is als je door de vrije ruimte beweegt.
- Verplaats lineair — Dit verplaatst de robot van de huidige positie naar een punt in de ruimte door een precieze lijn te volgen, wat handig is bij het verplaatsen om een object, schilderij, enz. op te pakken.
- Snelheid instellen — Dit bepaalt de snelheid van de eindeffector en/of gewrichten van de robot.
Offline programmeersoftware maakt programma's met behulp van een gegeneraliseerde versie van deze (en andere) opdrachten die op elke robot kunnen worden toegepast.
Robots spreken verschillende talen
Het probleem is dat elke verschillende fabrikant een andere manier heeft om commando's in hun robots te programmeren. Veel fabrikanten hebben hun eigen aangepaste programmeertaal en sommige gebruiken zelfs iets andere commando's voor verschillende versies van hun controllers.
Hier is bijvoorbeeld hoe de drie commando's die ik hierboven heb genoemd worden uitgedrukt voor verschillende robotcontrollers. Tussen haakjes heb ik ook het minimale aantal parameters en waarden weergegeven dat nodig is om een 6DoF-robot te besturen:
| Robot | Gezamenlijke beweging | Lineaire verplaatsing | Snelheid instellen | Padafronding |
| ABB IRC5 | VerplaatsJ (4) | MoveL (4) | speeddata(4) | zonedata(4) |
| Fanuc RJ3 | J (2) | L (2) | snelheid (1) | CNT (1) |
| Kawasaki | JMOVE (1) | LMOVE (1) | SNELHEID (1) | NAUWKEURIGHEID (1) |
| KUKA KRC | PTP (1) | LIN/SPL (1) | $VEL.CP (1) | $APO.CDIS (1) |
| Motoman JBI | MOVJ (2) | MOVL (2) | VJ/V (1) | PL (1) |
| Universele robots | movej (1) | movel/movep (1) | v(1) | r (1) |
Zoals je kunt zien, is elke opdracht vergelijkbaar voor elk robottype. Er is echter een verschil in de formulering en in de hoeveelheid informatie die nodig is om elke instructie te definiëren.
Zonder offline programmeren en post-processors zou je elke keer dat je een nieuw type robot programmeert een compleet nieuwe programmeertaal moeten leren. Dit vertraagt het programmeren van robots aanzienlijk.
Post-processors maken het gemakkelijk
Post-processors werken door de opdrachten te vertalen naar een specifiek programma voor uw robotmodel.
Met RoboDK hoeft u geen programmeertaal te leren om uw robot in beweging te krijgen. De geleverde post-processors zijn meestal voldoende om bruikbare, bugvrije code te genereren voor meer dan 30 merken robots.
De post-processor genereert ook alle benodigde initiatiecode en variabeledefinities, die vaak lastig te definiëren zijn bij normaal op tekst gebaseerd programmeren.
5 stappen voor het kiezen van de perfecte post-processor
RoboDK wordt geleverd met meer dan 40 postprocessors. U moet de juiste postprocessor voor uw robotcontroller kiezen.
Hoe kies je ertussen?
Als je een van de robots uit onze Robotbibliotheek hebt gebruikt, zul je zien dat er al één postprocessor als standaard is geselecteerd. Vaak wordt hierbij aangenomen dat u de nieuwste (of standaard) controller voor die robot gebruikt. Het kan echter zijn dat u een andere moet selecteren als de standaardpost niet voldoet aan de behoeften van uw toepassing of configuratie.

1. Kies de postprocessor voor uw robotmerk
Meestal is het het beste om eerst de standaard of meest elementaire post-processor te proberen.
Sommige robotmerken hebben standaard slechts één optie in RoboDK, b.v. Mecademic, Kawasaki, CLOOS, enz. In dit geval is uw keuze heel eenvoudig.
2. Kies de postprocessor voor uw controller
Sommige robotmerken hebben verschillende postprocessors voor verschillende controllers of versies van hun programmeertaal. Denso heeft bijvoorbeeld één postprocessor voor zijn oudere RC7-controllers en één voor zijn nieuwere RC8-controllers, aangezien ze tussen deze modellen zijn overgestapt van programmeren in de PAC-programmeertaal naar programmeren in PacScript.
Gebruik de post-processor voor uw specifieke controller, indien beschikbaar. Als er geen optie is voor uw specifieke controller, probeer dan degene die het dichtst bij het versienummer van uw controller ligt.
3. Kies de postprocessor voor uw toepassing
Sommige robotmerken hebben nogal wat verschillende postprocessors. KUKA heeft er 10!
Sommige van de extra postprocessors zijn voor specifieke toepassingen of instellingen. Er zijn bijvoorbeeld 5 postprocessors voor de KUKA KRC2-controller. Twee hiervan zijn voor toepassingen met hun CamRob-freesadd-on of KUKA CNC-besturing, waarmee duizenden regels code in één programmabestand kunnen worden opgeslagen (geschikt voor robotbewerking). De ene is specifiek voor toepassingen bij booglassen. Evenzo is er een UR-postprocessor die Robotiq-grijpers integreert.
Als er een post-processor voor uw controller is die geschikt is voor uw specifieke toepassing of opstelling, gebruik deze dan. Als er echter geen is voor uw toepassing, gebruikt u gewoon de basis-postprocessor voor uw merk en controller.
4. Kies de postprocessor die u gemakkelijk kunt bijwerken
Soms is het door RoboDK gegenereerde programma niet precies geschikt voor uw toepassing. Misschien wilt u extra regels code toevoegen om de functionaliteit uit te breiden. Dit is heel gemakkelijk te doen als je een beetje bekend bent met de programmeertaal van je robot.
Een paar van de post-processors zijn voorzien om het gemakkelijker te maken om de gegenereerde code te wijzigen en bij te werken.
De KUKA KRC2 heeft bijvoorbeeld opties die een DAT-bestand genereren. Dit is een interessant kenmerk van de KUKA-controller. In deze configuratie worden posities als variabelen opgeslagen in een apart DAT-bestand, wat het soms gemakkelijker kan maken om de code bij te werken, omdat je alleen de variabelen hoeft te wijzigen om de posities te wijzigen.
Evenzo zijn er twee Siemens Sinumerik-postprocessors:een waarbij de posities in millimeters worden aangegeven en de andere waarin ze in inches worden aangegeven.
Kies de post-processor die het u zo gemakkelijk mogelijk maakt om de robotcode bij te werken, mocht dat nodig zijn.
5. Een postprocessor maken of aanpassen
In sommige omstandigheden moet u mogelijk uw eigen postprocessor schrijven, bijvoorbeeld wanneer u uw robot in een unieke configuratie gebruikt.
Misschien wilt u ook een bestaande post-processor aanpassen aan uw specifieke opstelling of toepassing.
Het is heel eenvoudig om aangepaste post-processors in RoboDK te schrijven, aangezien het allemaal Python-programma's zijn en in een vergelijkbare indeling zijn geschreven.
Je kunt in deze video een eenvoudige tutorial bekijken die laat zien hoe je een postprocessor maakt of updatet.
Bekijk de post-processorpagina in onze documentatie voor meer details.
Welke vragen heeft u over postprocessors? Vertel het ons in de reacties hieronder of neem deel aan de discussie op LinkedIn , Twitter , Facebook of Instagram .
Industriële robot
- Cloud computing:alles wat u moet weten
- Containers versus serverloos; Alles wat je moet weten!
- Uitbesteed onderhoud in één oogopslag:alles wat u moet weten
- Alles wat u moet weten over pigmentdispersies
- Containervolgsystemen:alles wat u moet weten
- Capacity Planning Strategy – Alles wat u moet weten
- Alles wat u moet weten over IoT in onderhoud
- 9 stappen om een mes te smeden:alles wat u moet weten
- Alles wat u moet weten over technische tekeningen
- Alles wat u moet weten over metaalgieten
- Industriële koppelingsreparaties:alles wat u moet weten